完整这个任务不需要用到python3
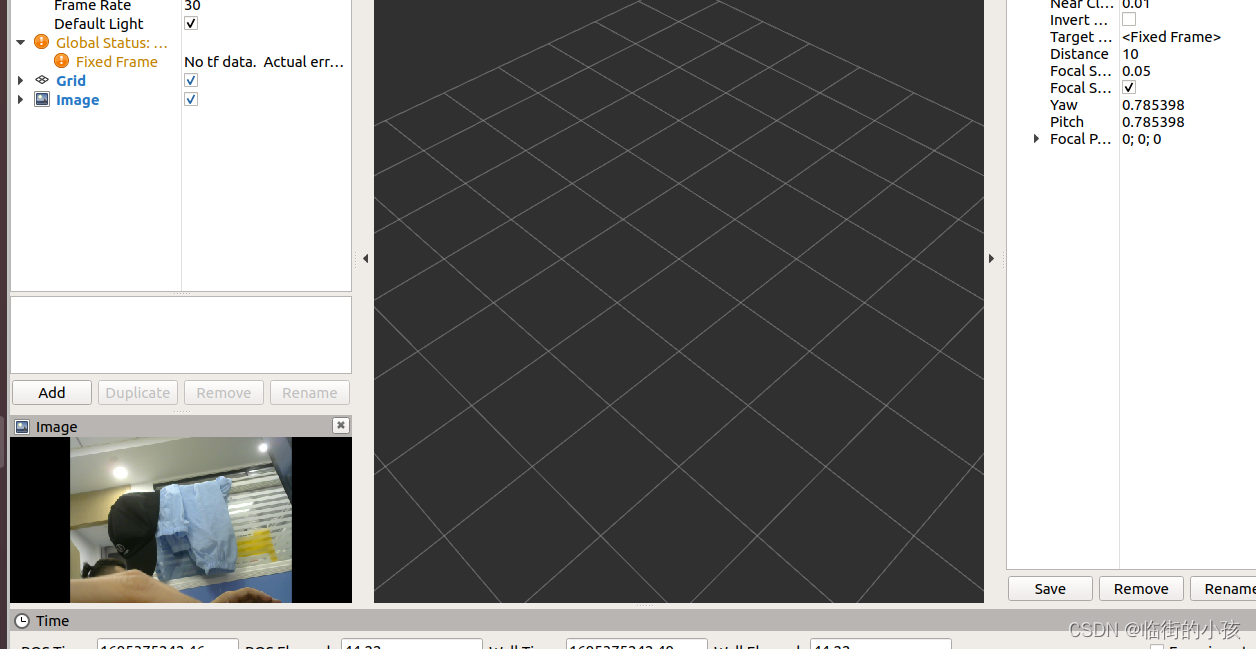
效果如下所示
 环境
环境
ROS1 python2.7
-
原始环境 无conda 或者conda deactivate 无conda 状态
-
pip install rospkg
-
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple opencv-python==4.2.0.3
-
代码 放在工程目录中
#!/usr/bin/env python
#!coding=utf-8
#write by leo at 2018.04.26
#function:
#1, Get live_video from the webcam.
#2, With ROS publish Image_info (to yolo and so on).
#3, Convert directly, don't need to save pic at local.
import rospy
from sensor_msgs.msg import Image
import cv2
import numpy as np
from cv_bridge import CvBridge, CvBridgeError
import sys
def webcamImagePub():
# init ros_node
rospy.init_node('webcam_puber', anonymous=True)
# queue_size should be small in order to make it 'real_time'
# or the node will pub the past_frame
img_pub = rospy.Publisher('webcam/image_raw', Image, queue_size=2)
rate = rospy.Rate(25) # 5hz
# make a video_object and init the video object
cap = cv2.VideoCapture(0)
# define picture to_down' coefficient of ratio
scaling_factor = 0.5
# the 'CVBridge' is a python_class, must have a instance.
# That means "cv2_to_imgmsg() must be called with CvBridge instance"
bridge = CvBridge()
if not cap.isOpened():
sys.stdout.write("Webcam is not available !")
return -1
count = 0
# loop until press 'esc' or 'q'
while not rospy.is_shutdown():
ret, frame = cap.read()
# resize the frame
if ret:
count = count + 1
else:
rospy.loginfo("Capturing image failed.")
if count == 2:
count = 0
frame = cv2.resize(frame,None,fx=scaling_factor,fy=scaling_factor,interpolation=cv2.INTER_AREA)
msg = bridge.cv2_to_imgmsg(frame, encoding="bgr8")
img_pub.publish(msg)
print '** publishing webcam_frame ***'
rate.sleep()
if __name__ == '__main__':
try:
webcamImagePub()
except rospy.ROSInterruptException:
pass
运行代码