摘要:本文利用动捕数据构建拟人运动模型,对比观察两种苹果采摘模式,并对系统性能进行全面评估,为提高机器人采摘效率提供创新方法。
近期,一项关于苹果采摘机器人的有趣研究—— "Design and evaluation of a robotic apple harvester using optimized picking patterns",在农业科学类二区SCI期刊Computers and Electronics in Agriculture上发表。

研究团队利用动作捕捉系统采集的数据构建拟人采摘运动模型,对比观察可应用于苹果采摘机器人的两种运动——优化的“水平拉动弯曲”运动和拟人运动,并使用现场测试对机器人系统的性能进行全面评估。研究为改善苹果采摘机器人的效率和性能提供了创新方法,为未来应用场景的拓展奠定了基础。
研究背景
为降低苹果采摘成本和风险,水果业的机械化势在必行。随着机器视觉技术的发展,苹果收获机器人成为研究热点。苹果收获机器人能够感知环境并自动识别、采摘和放置水果,但目前仍处于实验室和果园试验阶段。收获运动的选择和优化对于苹果采摘机器人的系统性能和效率起着至关重要的作用。
实验过程
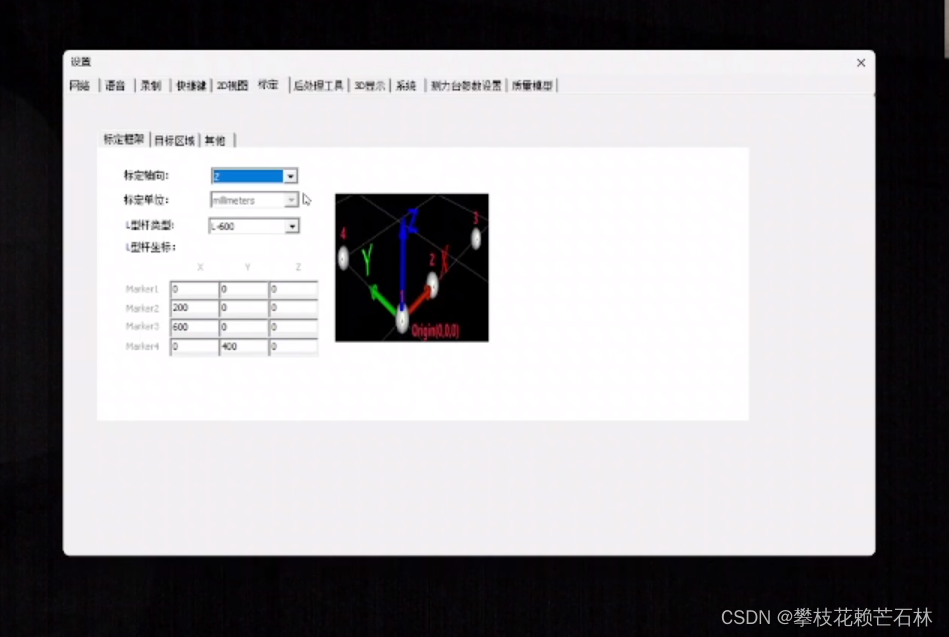
机器人硬件中的机械手是完成苹果采摘动作的关键部位。机械手的运动模式设计基于手动拾取动作数据和路径规划。研究团队运用NOKOV度量运动捕捉系统采集采摘者上臂运动的数据,测试区域周围有八个分辨率为2048×1088、3D精度为±0.15mm的数码相机。通过跟踪标记点收集数据,并将其传输到主机进行实时处理,计算空间中移动物体的坐标、速度和加速度(图1)

图1 NOKOV度量动作捕捉系统
1、拟人运动数据采集及路径规划:
实验用带有荧光表面的小球在采摘者的肩部、肘部、手腕和指尖进行标记(图2),由于机械手的结构与人类手臂的结构不同,因此仅使用指尖轨迹数据进行分析。

图2 采摘动作捕捉过程
拾取运动的振幅小且速度快,因此将数据采集频率设置为每秒100帧。同时,为了保持高跟踪精度,系统确保至少有三个摄像头跟踪每个标记点。将运动开始时的指尖标记作为初始位置,每5mm水平位移记录高度变化。数据采集实验共进行了10次。试验完成后对平均值进行多项式拟合,拟合轨迹如图3(a)。
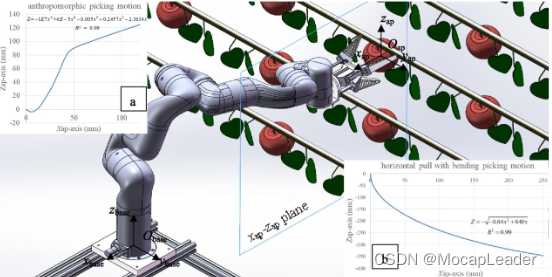
图3. 两种采摘运动的轨迹:(a)拟人采摘运动 和(b)“弯曲水平拉动”采摘运动
2、“弯曲水平拉动”采摘运动路径规划:
使用 MoveIt 进行路径规划。如图3(b)所示。在末端执行器抓住水果后,执行xap-zap平面中从水果位置开始的采摘轨迹。
实验结果
苹果收获现场评估的统计总结如表 1 所示。具体而言,使用拟人动作的苹果采摘成功率为80.17%,比使用“水平拉动并弯曲”动作时(82.93%)低2.76%。另外,在时间方面,使用“水平拉动弯曲”运动的采摘过程的周期时间为12.53±0.53秒,比使用拟人采摘运动的平均时间(17.17±0.36 秒)少4.64 秒;采摘动作本身耗时1.14秒和3.13秒,分别占其总周期时间的9.10%和18.23%。
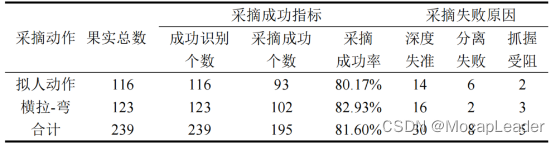
表1 苹果收获试验结果统计表
在采摘过程中,无论使用哪种动作,苹果都没有被拔出或碰伤。基于上述分析,两种采摘运动都显示出在采摘机器人中的应用潜力。与拟人化运动相比,“水平拉动并弯曲”采摘运动具有优越的采摘周期时间和成功率。未来,拟人化运动或将应用于非结构化果园中的采摘机器人。提高采摘机器人感知环境的能力和采摘长摆树枝上生长的苹果的能力是两个潜在的研究方向。
参考文献:
Lingxin Bu, Chengkun Chen, Guangrui Hu, Adilet Sugirbay, Hongxia Sun, Jun Chen,Design and evaluation of a robotic apple harvester using optimized picking patterns,Computers and Electronics in Agriculture, Volume 198,2022, 107092, ISSN 0168-1699
原文链接:https://doi.org/10.1016/j.compag.2022.107092