1.ros2的版本如下
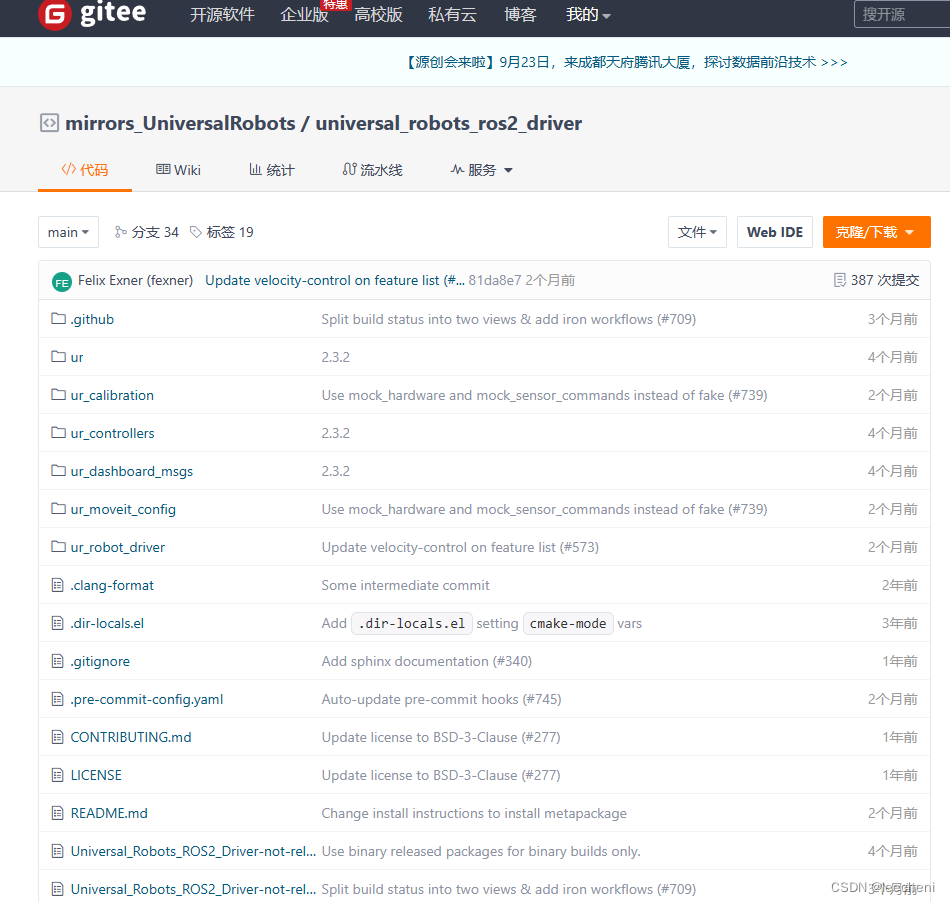
2.在码云上找到UR驱动包
GitHub很多时候都是无法打开的,但是码云可以复制这个GitHub上的包,别人已经复制好了。可以用连接如下:
universal_robots_ros2_driver
3.查看该包的readme文件
这里面有介绍使用二进制安装,不要搞源码安装,太麻烦。
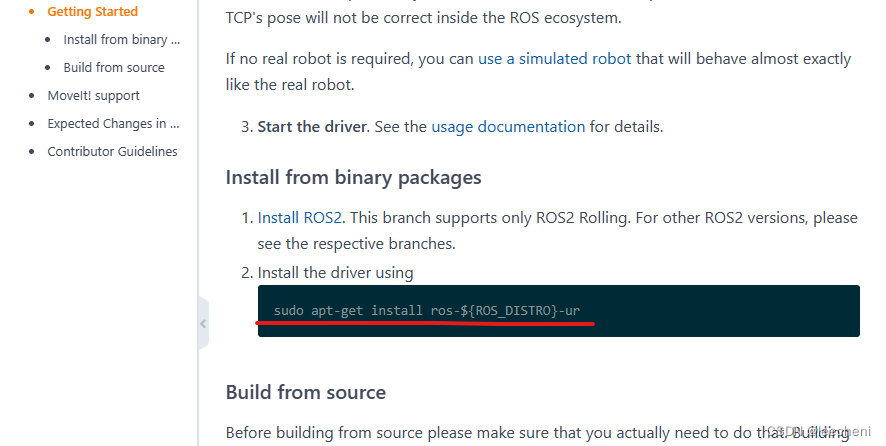
4.在Ubuntu上安装
输入这个命令,使用tab键补全,发现是有这个安装包的。

会提示安装很多东西,输入y进行安装即可。
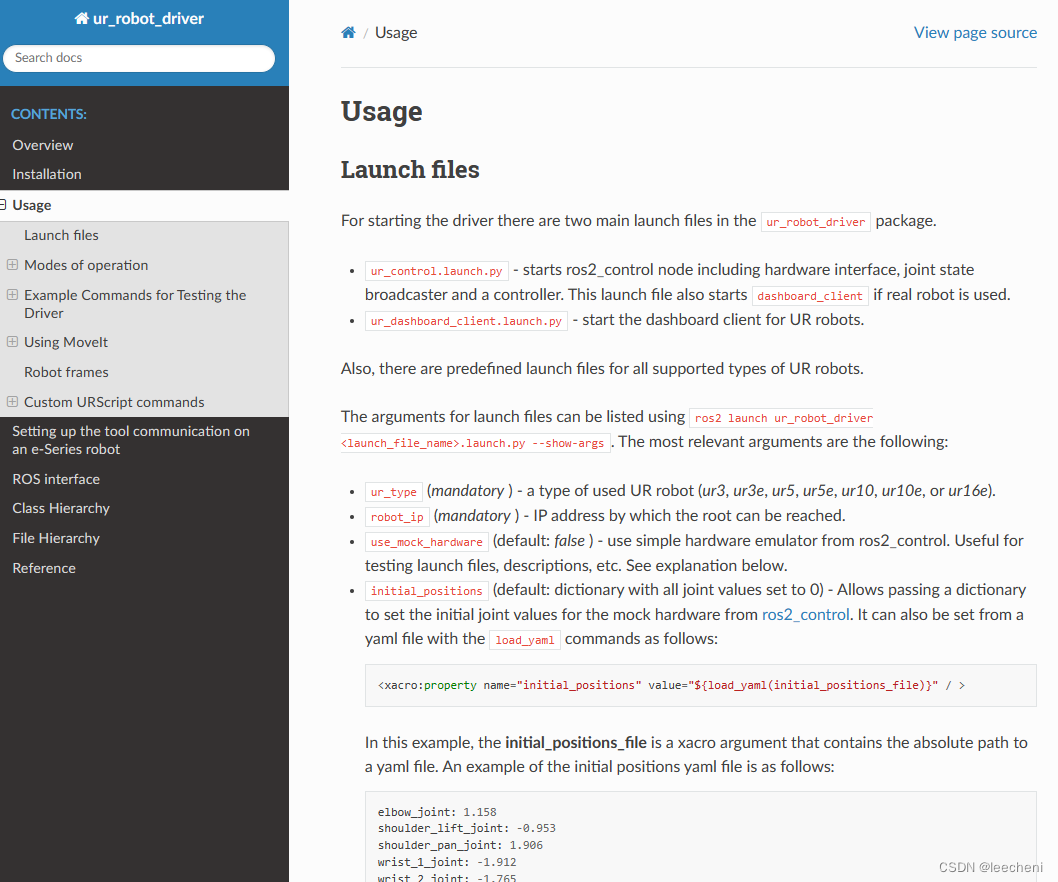
5.打开文件进行测试
readme文件里面显示的如下:
比较复杂,还没有完全测试,后续补充。

连接地址是这里面:
Usage — ur_robot_driver documentation
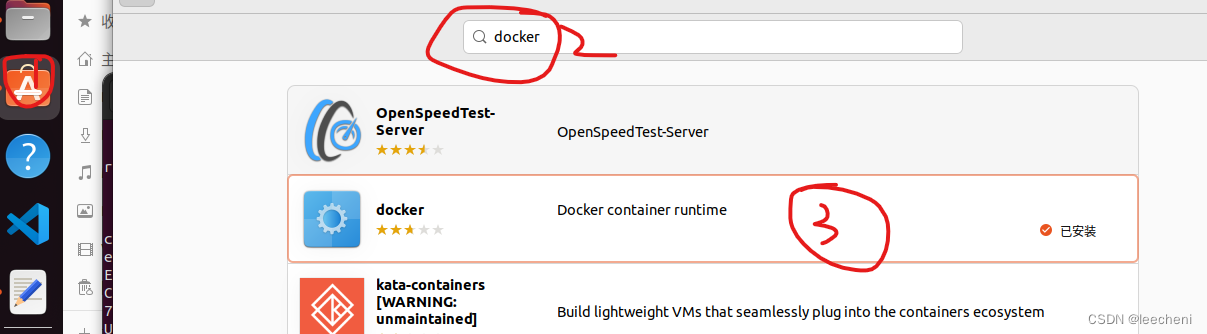
6.安装docker和Ursim
使用软件中心搜索docker并进行安装
输入教程文档中的这个打开仿真器的命令
ros2 run ur_client_library start_ursim.sh -m ur10
ur10 可以换成其他的机器人型号UR3、UR3E、UR5、UR5E、UR10、UR10E或UR16E
这个速度有点儿慢,好像2分钟后才开始下载,下载的速度还可以的。
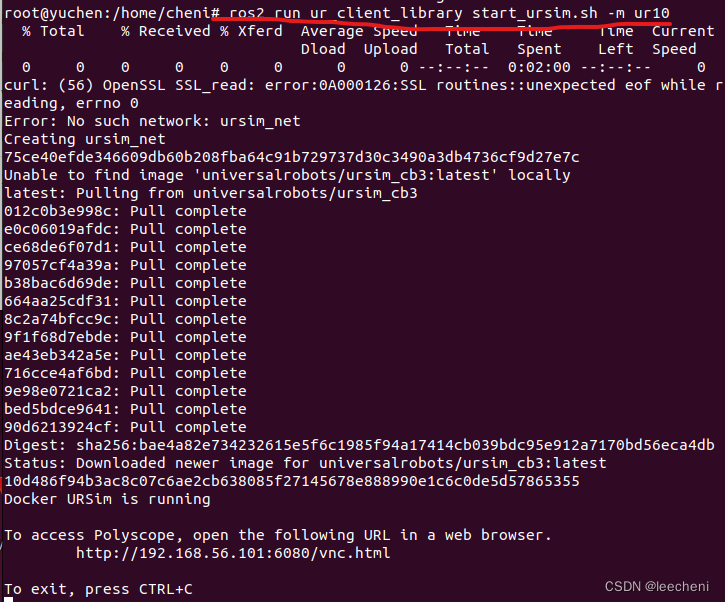
打开命令行中的地址,浏览器中可以看到如下界面
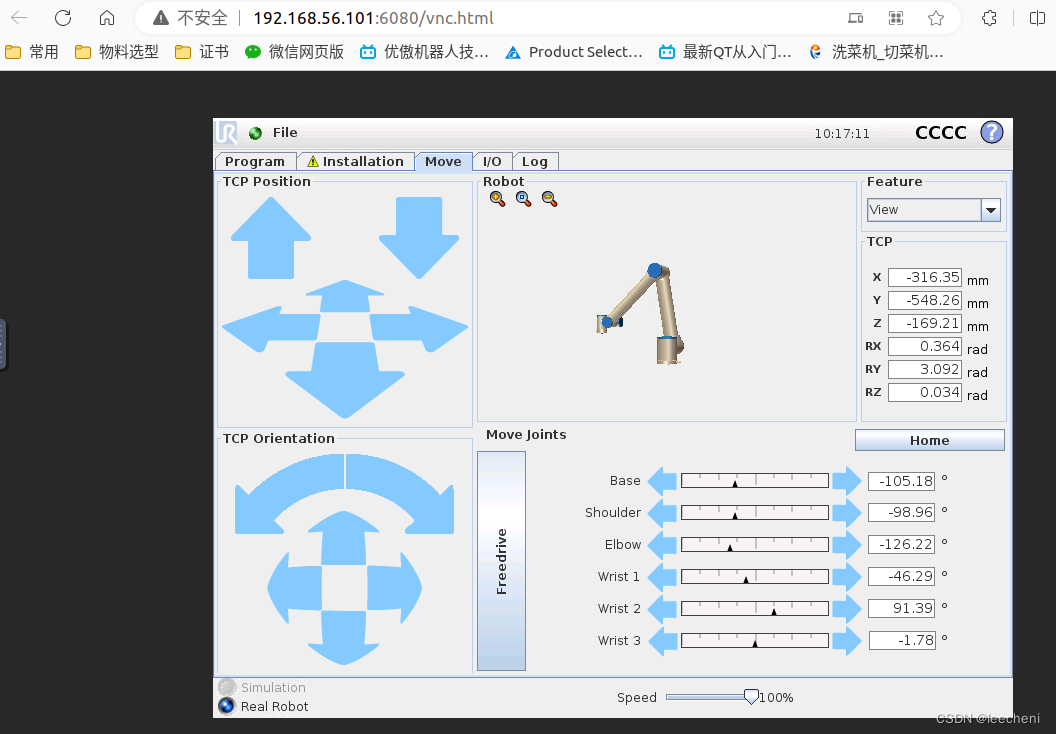
7.连接到仿真器
.连接后就可以看到UR官方的界面,这个就是示教器上的界面。
8.具体命令使用
当这个仿真器启动后

输入这个命令
ros2 launch ur_robot_driver ur_control.launch.py ur_type:=ur10 robot_ip:=192.168.56.101 launch_rviz:=true
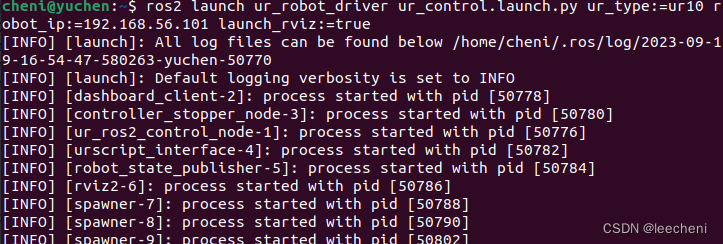
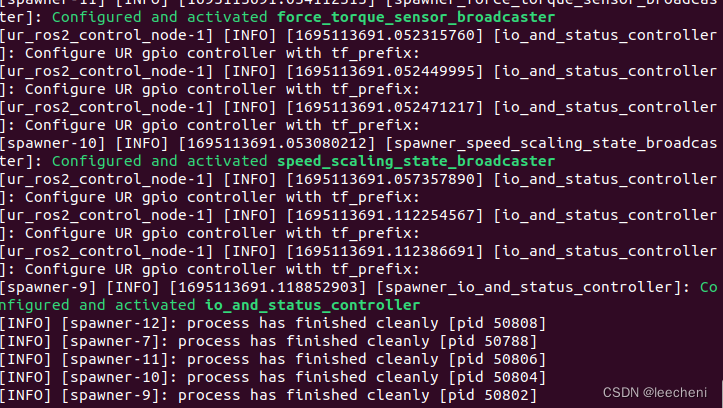
这个时候RVIZ也运行了起来
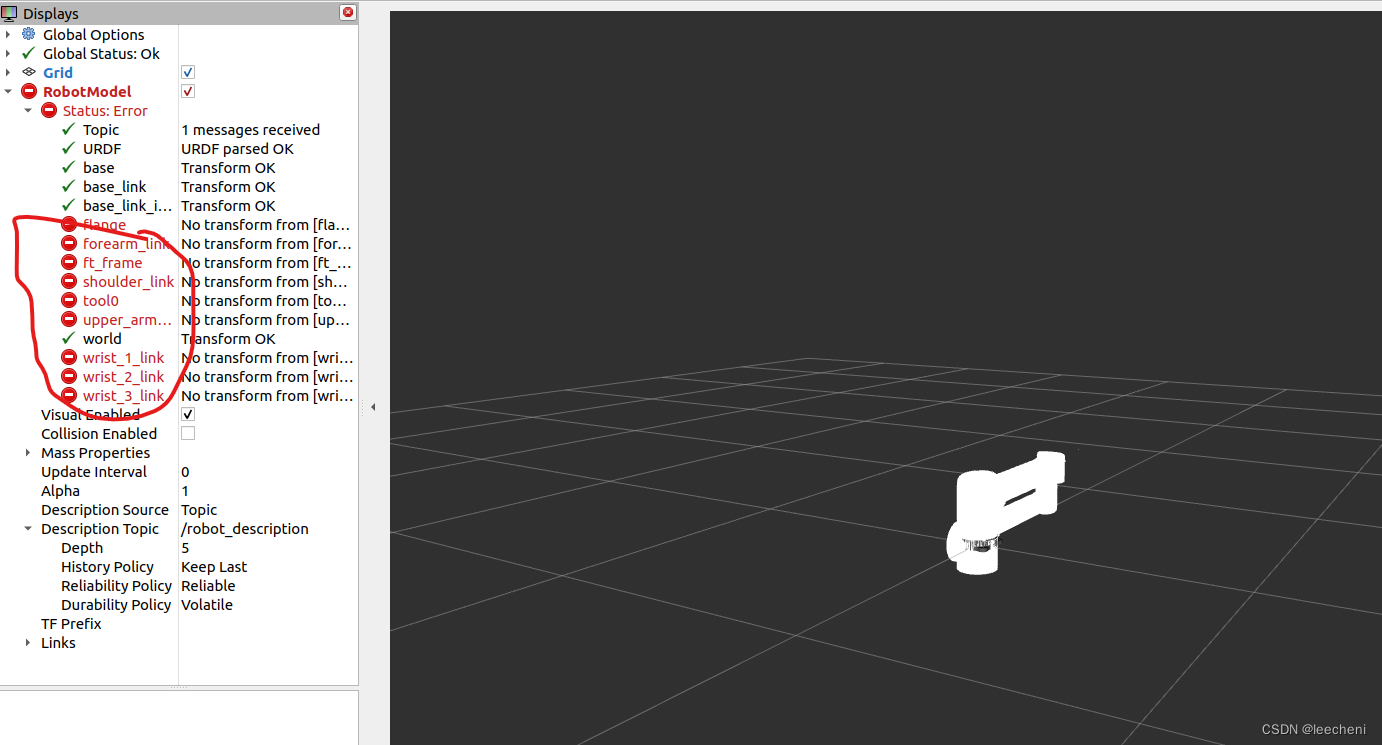
只是有不少错误,后续再慢慢解决吧!
我一开始只安装了ros的基本包,没有launch命令,重新安装了desktop桌面版后就可以正常到这一步了。