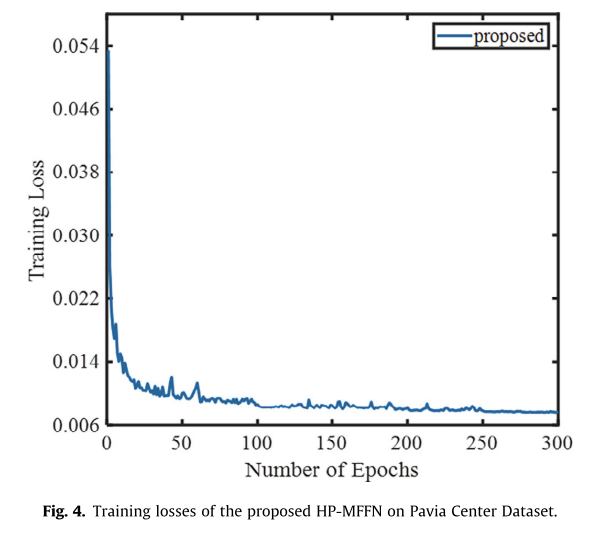
⛄一、简介
理论知识参考文献:基于Retinex和ADMM优化的水下光照不均匀图像增强算法
⛄二、部分源代码
function out = PlugPlayADMM_deblur(y,h,lambda,method,opts)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%out = PlugPlayADMM_deblur(y,h,lambda,method,opts)
%deblurs image y by solving the ADMM:
%
%inversion step: x=argmin_x(||Ax-y||2+rho/2||x-(v-u)||2)
%denoising step: v=Denoise(x+u)
% update u: u=u+(x-v)
%
%Input: y - the observed gray scale image
% h - blur kernel
% lambda - regularization parameter
% method - denoiser, e.g., ‘BM3D’
% opts.rho - internal parameter of ADMM {1}
% opts.gamma - parameter for updating rho {1}
% opts.maxitr - maximum number of iterations for ADMM {20}
% opts.tol - tolerance level for residual {1e-4}
% ** default values of opts are given in {}.
%
%Output: out - recovered gray scale image
%
%Xiran Wang and Stanley Chan
%Copyright 2016
%Purdue University, West Lafayette, In, USA.
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Check inputs
if nargin<4
error(‘not enough input, try again \n’);
elseif nargin==4
opts = [];
end
% Check defaults
if ~isfield(opts,‘rho’)
opts.rho = 1;
end
if ~isfield(opts,‘max_itr’)
opts.max_itr = 20;
end
if ~isfield(opts,‘tol’)
opts.tol = 1e-4;
end
if ~isfield(opts,‘gamma’)
opts.gamma=1;
end
if ~isfield(opts,‘print’)
opts.print = false;
end
% set parameters
max_itr = opts.max_itr;
tol = opts.tol;
gamma = opts.gamma;
rho = opts.rho;
%initialize variables
dim = size(y);
N = dim(1)*dim(2);
Hty = imfilter(y,h,‘circular’);
eigHtH = abs(fftn(h, dim)).^2;
residual = inf;
%set function handle for denoiser
switch method
case ‘BM3D’
denoise=@wrapper_BM3D;
case ‘TV’
denoise=@wrapper_TV;
case ‘NLM’
denoise=@wrapper_NLM;
case ‘RF’
denoise=@wrapper_RF;
otherwise
error(‘unknown denoiser \n’);
end
% main loop
if opts.print==true
fprintf(‘Plug-and-Play ADMM — Deblurring \n’);
fprintf(‘Denoiser = %s \n\n’, method);
fprintf(‘itr \t ||x-xold|| \t ||v-vold|| \t ||u-uold|| \n’);
end
itr = 1;
while(residual>tol&&itr<=max_itr)
%store x, v, u from previous iteration for psnr residual calculation
x_old = x;
v_old = v;
u_old = u;
%inversion step
xtilde = v-u;
rhs = fftn(Hty+rho*xtilde,dim);
x = real(ifftn(rhs./(eigHtH+rho),dim));
%denoising step
vtilde = x+u;
vtilde = proj(vtilde);
sigma = sqrt(lambda/rho);
v = denoise(vtilde,sigma);
%update langrangian multiplier
u = u + (x-v);
%update rho
rho = rho*gamma;
%calculate residual
residualx = (1/sqrt(N))*(sqrt(sum(sum((x-x_old).^2))));
residualv = (1/sqrt(N))*(sqrt(sum(sum((v-v_old).^2))));
residualu = (1/sqrt(N))*(sqrt(sum(sum((u-u_old).^2))));
residual = residualx + residualv + residualu;
if opts.print==true
fprintf('%3g \t %3.5e \t %3.5e \t %3.5e \n', itr, residualx, residualv, residualu);
end
itr = itr+1;
end
out = v;
end
function y = afun(x,transp_flag,h,dim)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Example of the A matrix
%
% This example illustrates how to construct the A matrix
% for deblurring problem. The function executes the operations of
% A*x and A’*x
%
% Stanley Chan
% Purdue University
% Nov 24, 2016
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
rows = dim(1);
cols = dim(2);
if strcmp(transp_flag,‘transp’) % y = A’x
x = reshape(x,[rows,cols]);
y = imfilter(x,rot90(h,2),‘circular’);
y = y(😃;
elseif strcmp(transp_flag,‘notransp’) % y = Ax
x = reshape(x,[rows,cols]);
y = imfilter(x,h,‘circular’);
y = y(😃;
end
end
function out = wrapper_NLM(in,sigma)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% out = wrapper_NLM(in,sigma)
% performs non-local means denoising
%
% Require NLM package
%
% Download:
% http://www.ipol.im/pub/art/2011/bcm_nlm/
%
% Xiran Wang and Stanley Chan
% Copyright 2016
% Purdue University, West Lafayette, In, USA.
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Options.filterstrength=sigma;
out = NLMF(in,Options);
end
⛄三、运行结果

⛄四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1]刘卫东,李吉玉,张文博,李乐.基于Retinex和ADMM优化的水下光照不均匀图像增强算法[J].西北工业大学学报. 2021,39(04)
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除


![[附源码]计算机毕业设计Node.js博客管理系统(程序+LW)](https://img-blog.csdnimg.cn/2b85fbc5b8f64af5b101c3734ae68603.png)


![zibll子比主题6.7用户徽章功能详解及配置教程[V6.7新功能]](https://img-blog.csdnimg.cn/e018a39f6bbf43ec96b4fbb37770d183.png)
![[3D数据深度学习] (PC/服务器集群cluster)CPU内存/GPU显存限制及解决办法](https://img-blog.csdnimg.cn/b38416df2ed745a295158705344273c7.png)