"讷为君子,寡为吉人 ”
- 1. 立体稠密地图
- 1.1 地图构建
- 1.2 分析立体相机稠密建图效果
- 2. RGB-D稠密地图
- 2.1 地图对比
- 2.1.1 八叉树地图
- 3. 建图?定位?孰轻孰重
- 3.1 鬼影问题
- 3.2 三维重建
- 4. 总结
SLAM的功能: 直到现在我们可以知道SLAM包含:定位,导航,避障,重建,交互。
- 在不同的功能下也有不同的地图。
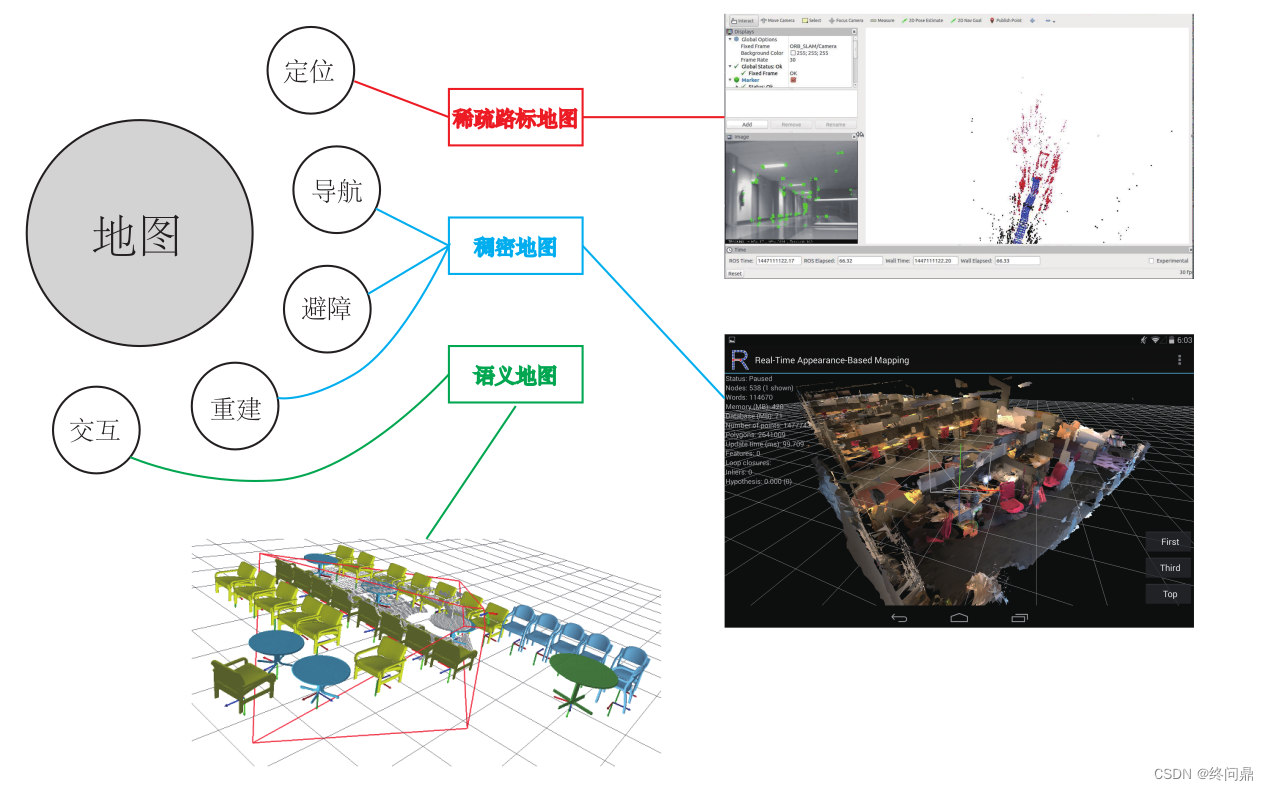
之前的都是稠密地图,不同功能要不同地图,本节看稠密地图构建。
1. 立体稠密地图
构建地图必须要知道每个像素点到照片的距离。
立体视觉 : 单目和双目的统称,单目做三角化,双目做时差;
另一种:用RGB-D直接获得距离。
1.1 地图构建
稠密地图,无法将每个像素都当做特征点。寻找新的匹配算法。
- 极线搜索 和 块匹配:负责匹配,确定A图中的点出现在B图中的位置;
- 深度滤波器:确定匹配到的深度,用多次三角测量使其收敛。
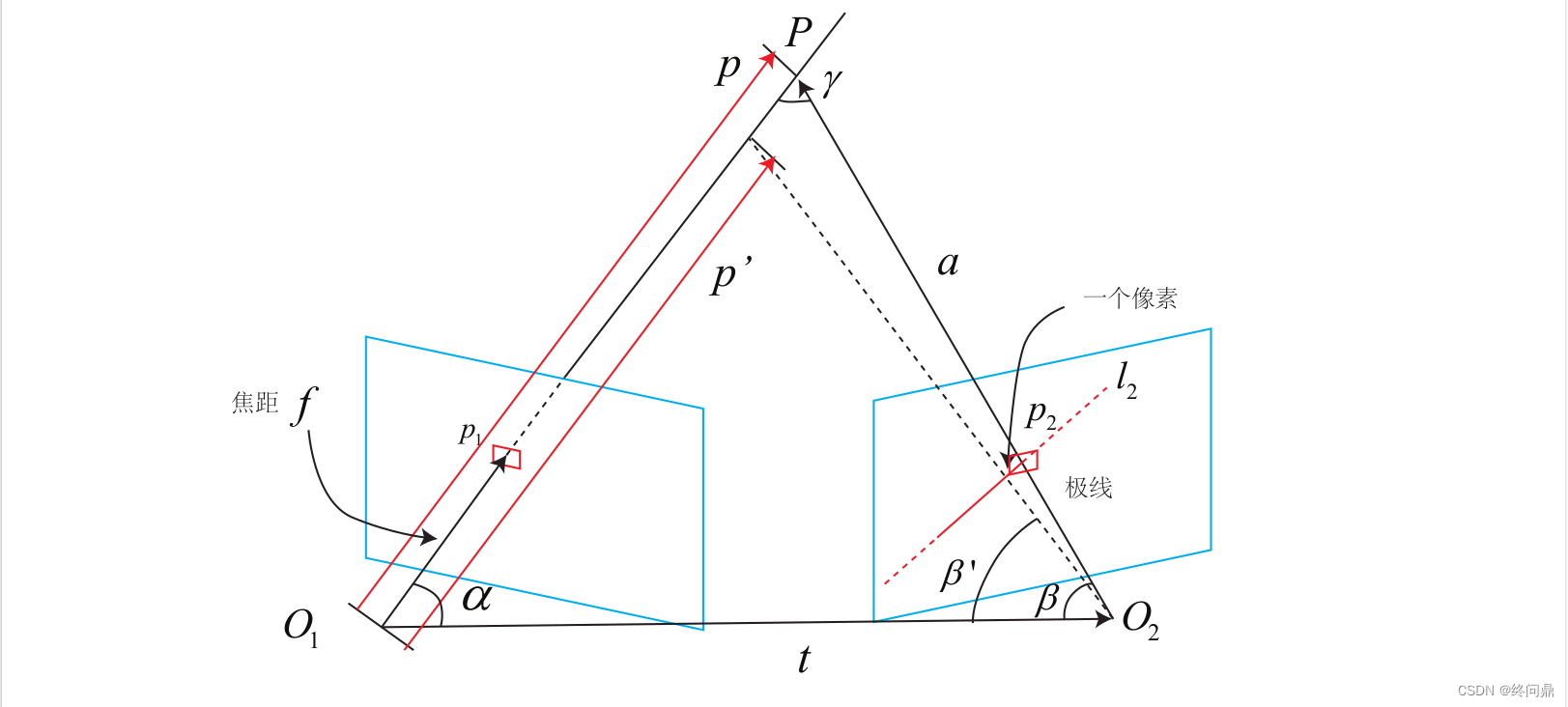
极线搜索示意图
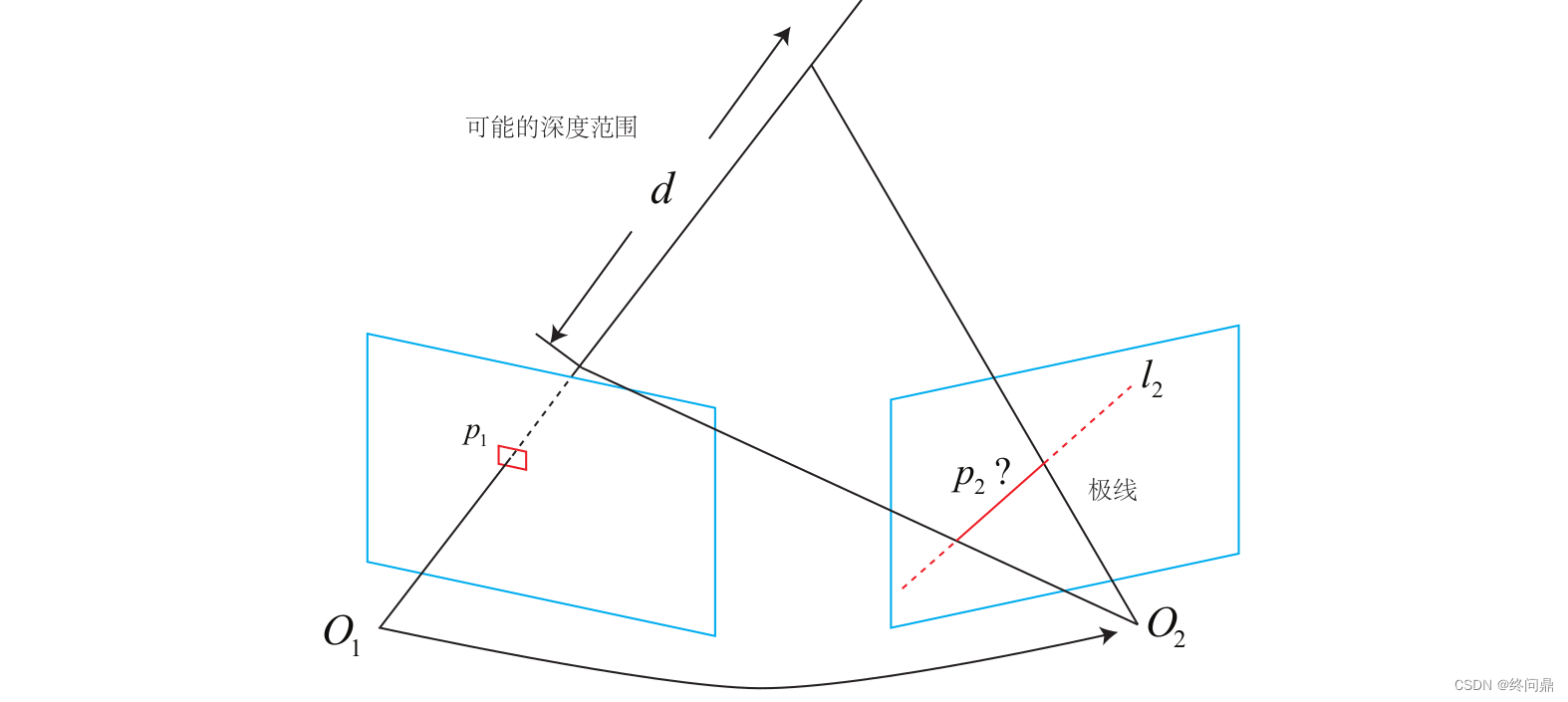
描述的是:不同视觉下观察同一个点,相机1中的
p
1
p_1
p1 点,实际的点一定在
d
d
d 这条线上,在相机2中观察这个点就在极线
l
2
l_2
l2 上,在这条线上搜索和
p
1
p_1
p1 比较相近的点。这就是极线搜索
块匹配
- 上边极线搜索,在线上如何搜索到与 p 1 p_1 p1 相近的点,方法很多,比如直接比像素(直接法,误差大),块匹配等。
- 这里介绍块匹配,一条线上相似亮度的像素很多,那就取图像块,在 p 1 p_1 p1 周围取一个大小为 w ⋅ w w\cdot w w⋅w 的图像块,在极线上也这么取同样大小的小块比较,提高区分性。(比较两个小块方法有 SAD,SSD, NCC,还有改进的为了去掉光照影响,去每个小块均值的SAD,SSD等等)。
深度滤波器
在搜索距离比较长的情况下,真实的对应点尽管只有一个,但在搜索极线时会有很多峰值,如下,
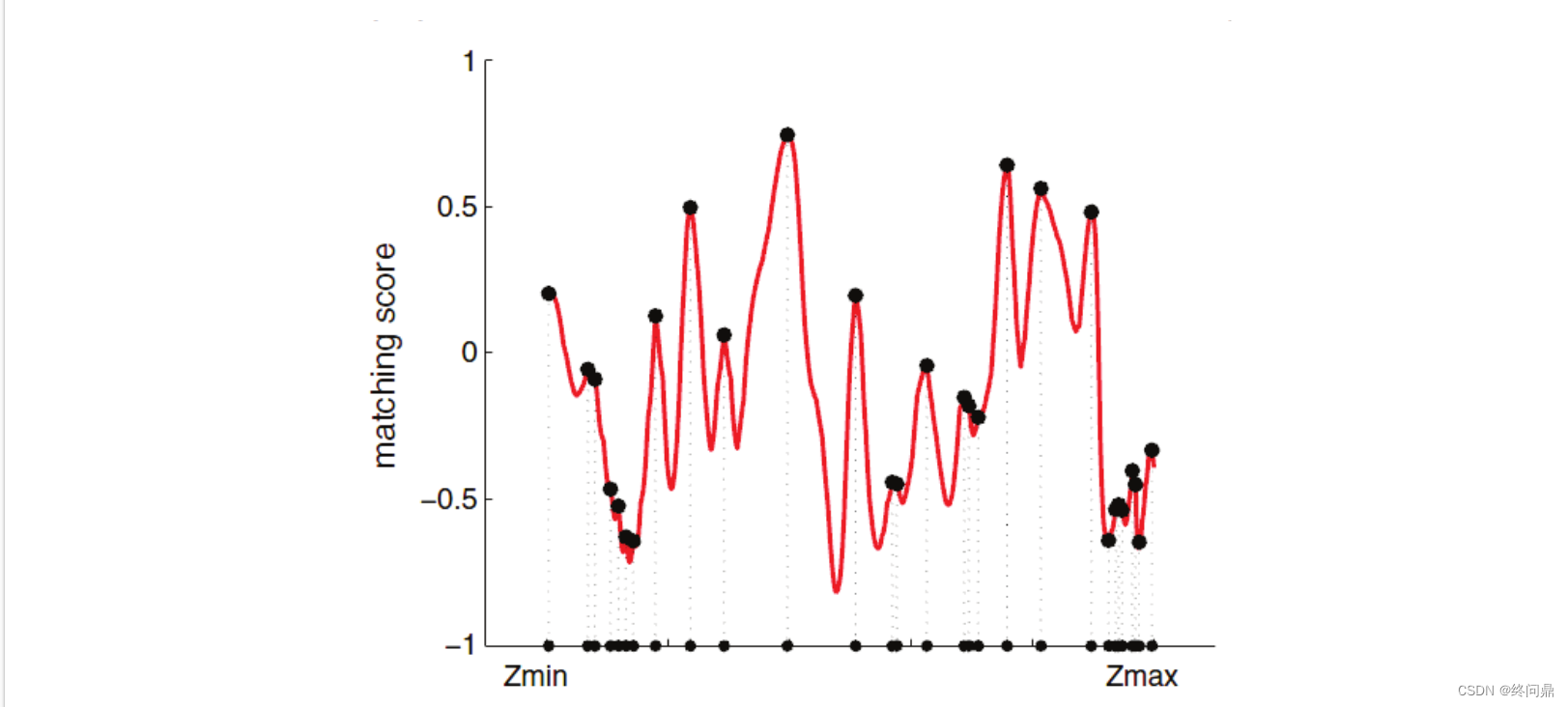
非凸性,对一个点我们不会用单一数值去表示深度,而是用高斯概率
P
(
d
)
=
N
(
μ
,
δ
2
)
P(d) = N(\mu, \delta ^2)
P(d)=N(μ,δ2),新的数据到来,都会观测它的深度,两个高斯分布进行融合。
分析这样做的误差(集合不确定性,这里以一个像素误差为例)
当最后的
δ
\delta
δ 收缩到一定小,认为深度数据已经收敛。
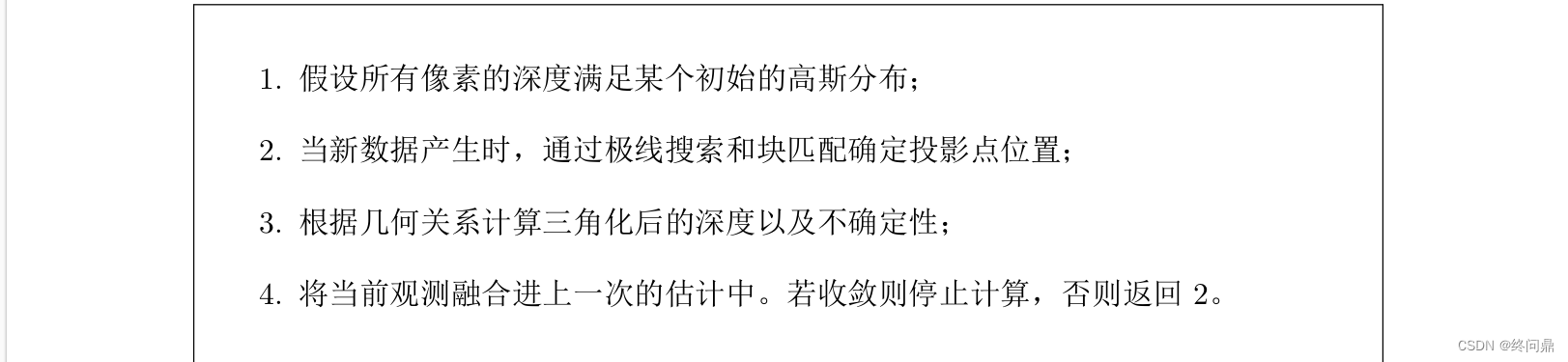
估计稠密像素深度的完整过程:
结果:大部分是正确的,但是没有得到预期效果。
1.2 分析立体相机稠密建图效果
- 像素梯度和块匹配的影响:像素梯度沿着块变化明显则效果好,像素梯度沿着块变化不明显则效果不好,如果图像仅仅是一片黑,一片白,没有有效信息,则不好匹配;(对物体纹理的依赖)
- 假设了深度符合高斯分布,实际中他的距离会从0到无穷,这个时候逆深度是高斯中比较有效的,有更好的数值稳定性,现在比较通用,就是在推导中深度的倒数;
- 如果相机明显旋转时,下黑上白的图像块可能会下白上黑,导致相关性为负,永远不可能匹配到了,尽管还是同一个。
-
- 解决:在匹配之前要做图像间的变换,根据两幅图像的相机位姿考虑进来,对图像做仿射变换后,再进行匹配。
- 稠密估计一般GPU
- 在边缘区域深度变化可能很大,给深度估计加正则化,使相邻的深度变化不会太大;
- 没有考虑外点(没有匹配的点)
总之太过于依赖环境纹理和光照,不可靠
2. RGB-D稠密地图
RGB-D的结构光和飞时原理,保证了深度数据对纹理的无关性。只要能反射光就能估计深度;
2.1 地图对比
- 点云地图 ,可以含有 x , y , z , r , g , b x,y,z,r,g,b x,y,z,r,g,b 信息,有相机位姿则点云加和就是全局点云。但是点云地图比较初级:不满足定位,基本满足导航和避障,可视化不符合人类习惯,是一类初级地图
-
- 细节:去掉深度太大或者无效的点;统计滤波器去掉孤立点;体素滤波器:降采样节省空间;
- 但是:适合导航的占据网格地图(Occupancy Grid) 是从点云出发的,SFM中的泊松重建,或者Surfel通过基本点云地图构建了漂亮的可视化地图。(其他地图详见PCL库)。
2.1.1 八叉树地图
- 八叉树地图:导航常用,压缩性能较好,可随时更新。(对标点云的规模大,无法处理运动物体)
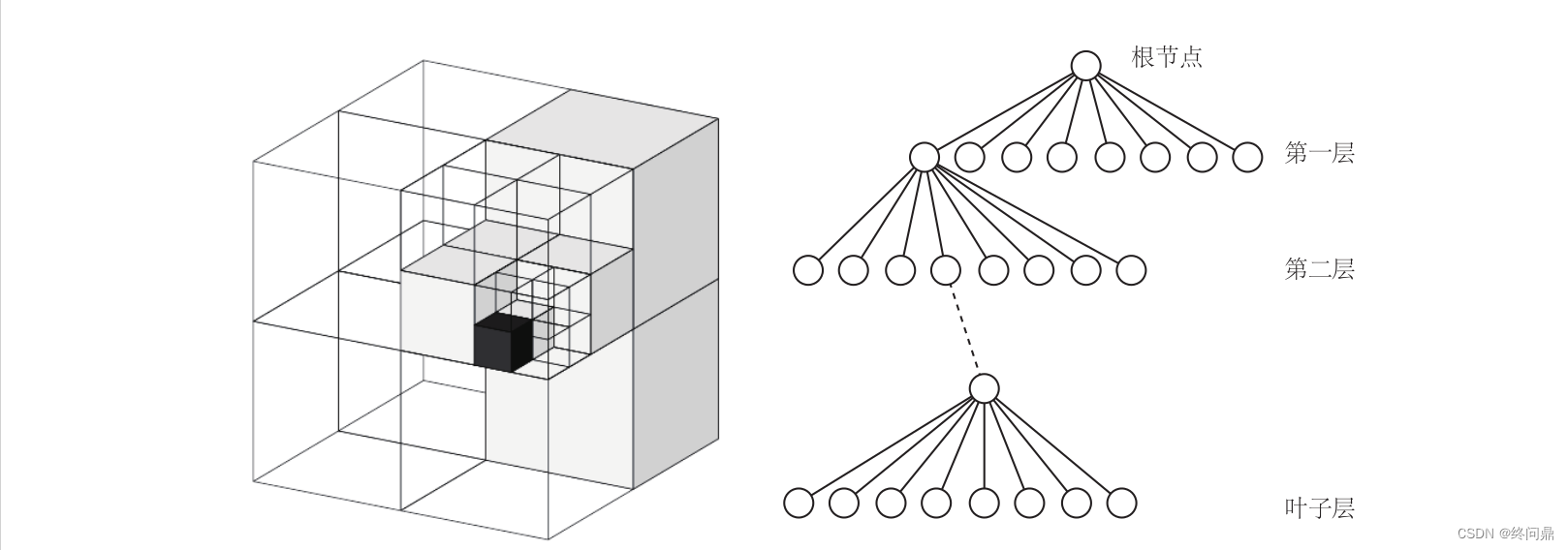
- 八叉树地图如上:假设房间是1块立方体,上前右分别切一刀,这样做一次,就被分成8个,对应八叉树第一层,对分开的小方块再如此做,这样深度越深,可储存容量越大;
- 节省空间:某个方块的所有子节点都被占据或者不占据时,这个节点便没必要展开,0表空白,1表占据,由于噪声,我们用概率来储存;
- 具体的储存方法:给定一个初始值,比如0.1,如果不断观测到它被占据,就一直累加,反之一直减小;为了防止它超界,用对数即可。
当有一个深度 d d d 的像素出现:证明深度值对应的空间点观察到一个占据数据,且从光心到这个点的线段没有障碍。
一个八叉树地图如下:
3. 建图?定位?孰轻孰重
3.1 鬼影问题
前边为了使用,我们以定位为主题进行了建图,这样的建图有问题
-
地图的构建只能在关键帧层面,由于算力原因;
-
没有优化地图,只是拼接叠加,假如两帧出现同一个物体,这种叠加往往不够准确,会有两个重影—鬼影。
总而言之,地图构建的不够精确
3.2 三维重建
这里将重建准确地图作为主题,定位次之,基于GPU加速。且研究方向正在往大规模,大型动态场景的重建方向发展。
RGBD实时重建方法也很多,TSDF地图等等。
4. 总结
单目或双目可以构建;但是RGB-D容易点,更稳定,没有讨论拓扑地图,只讨论了度量地图。