1.功能描述
本文示例所实现的功能为:采用蓝牙远程遥控双节履带机械臂小车进行运动。

2.结构说明
双节履带机械臂小车,采用履带底盘,可适用于任何复杂地形。 前节履带抬起高度不低于10cm,可用于履带车进行爬楼行进。 底盘上装有一个两自由度机械臂,可用于排爆等工作。

3.电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1扩展板 |
| 通信 | 蓝牙串口模块 |
| 电池 | 7.4V锂电池 |
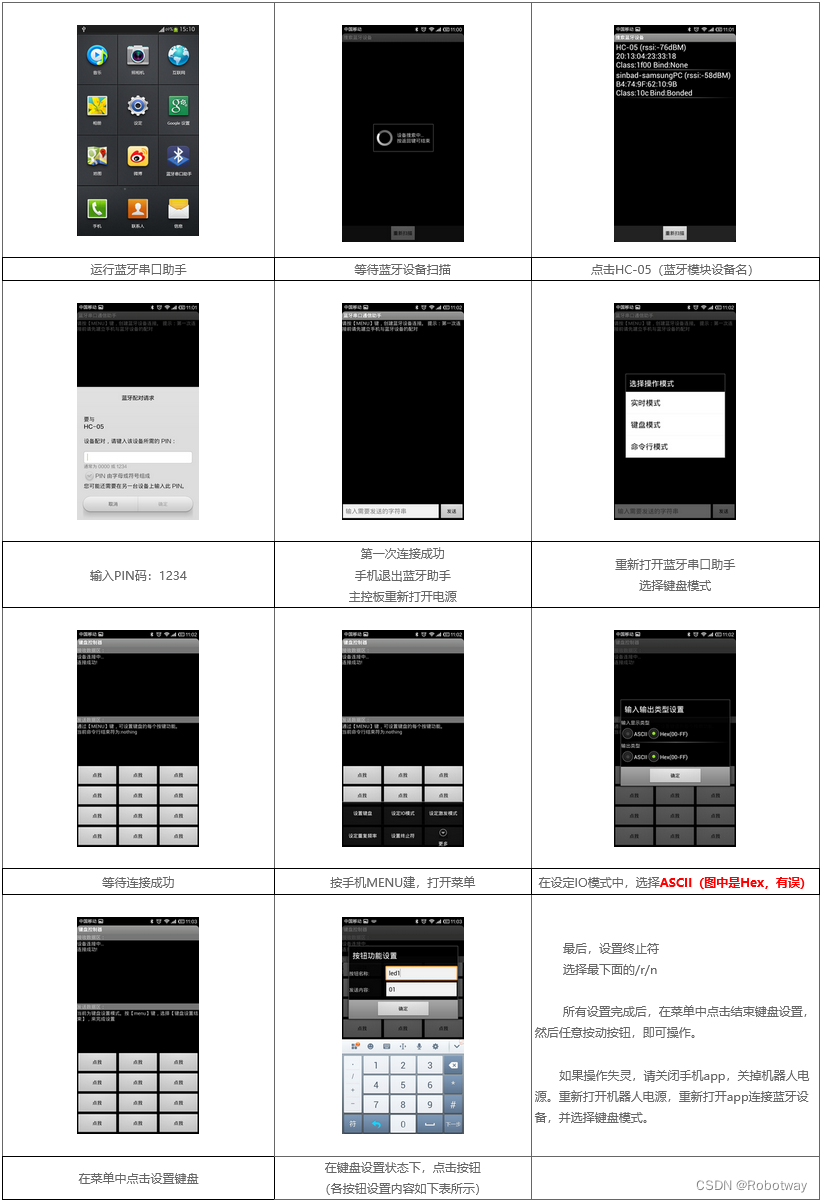
4.app安装与配置
将文末资料中的“蓝牙串口助手.apk”安装到安卓手机中。将蓝牙模块连接到主控板并打开电源,然后在手机上运行蓝牙串口助手。
| 按钮名称 | 发送内容 |
| 下撑 | 0@0:0=0(90,90,201,201,30);@ |
| 平铺 | 0@0:0=0(90,90,201,201,90);@ |
| 上撑 | 0@0:0=0(90,90,201,201,150);@ |
| 放下 | 0@0:0=0(90,90,10,201,201);@ |
| 前进 | 0@0:0=0(70,110,201,201,201);@ |
| 抬起 | 0@0:0=0(90,90,40,201,201);@ |
| 左转 | 0@0:0=0(110,110,201,201,201);@ |
| 停止 | 0@0:0=0(90,90,201,201,201);@ |
| 右转 | 0@0:0=0(70,70,201,201,201);@ |
| 打开 | 0@0:0=0(90,90,201,150,201);@ |
| 后退 | 0@0:0=0(110,70,201,201,201);@ |
| 夹取 | 0@0:0=0(90,90,201,100,201);@ |
5.功能实现
编程环境:Arduino 1.8.19 下面提供一个蓝牙远程遥控双节履带机械臂小车运动的参考程序(EODrobot.ino):
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-09-04 https://www.robotway.com/
------------------------------*/
#include <Arduino.h>
#include <Servo.h>
#include <pasta.h>
#include <SignalFilter.h>
#include <EEPROM.h>
String serialString = "";
boolean serialComplete = false;
char stringBuf[100];
Protocol protocol;
Servo myServo[5];
int data[5];
int olddata[5];
int port[5] = {7,8,12,11,3};
void setup()
{
Serial.begin(9600);
for(int i = 0; i < 5; i++){
data[i] = 201;
myServo[i].attach(port[i]);
}
myServo[0].write(90);
myServo[1].write(90);
myServo[2].write(10);
myServo[3].write(150);
myServo[4].write(90);
}
void loop()
{
if (serialComplete) {
protocol.Analyze(serialString);
for(int i = 0; i < 5; i++)
data[i] = protocol.parameter.GetAt(i);
serialString = "";
serialComplete = false;
for(int i = 0; i < 5; i++){
if(olddata[i] != data[i]){
if(data[i] == 201)
continue;
else if(data[i] > 0 && data[i] < 180){
myServo[i].write(data[i]);
}
olddata[i] = data[i];
}
}
}
}
void serialEvent() {
while (Serial.available()) {
char inChar = (char)Serial.read();
serialString += inChar;
if (inChar == '\n') {
serialComplete = true;
}
}
}
程序源代码、样机3D文件以及蓝牙串口助手.apk等资料详见 双节履带机械臂小车-蓝牙遥控