机器人开发--电机中的电流环、速度环、位置环
- 电流环、速度环、位置环
- 1 三环原理
- 1.1 电流环
- 1.2 速度环
- 1.3 位置环
- 2 各环与PID控制
- 2.1 电流环重点在 PID(比例、积分和微分)
- 2.2 速度环重点在 PI(比例和积分)
- 2.3 位置环重点在 P(比例)
- 2.4 PID各自对差值调节对系统的影响
- 单独的P(比例)
- 单独的I(积分)
- PI(比例积分)
- 单独的D(微分)
- 2.5 整体经验
- 3 控制方式
- 3.1 脉冲方式
- 3.2 通讯方式
- 3.3 模拟量方式
- 参考
电流环、速度环、位置环
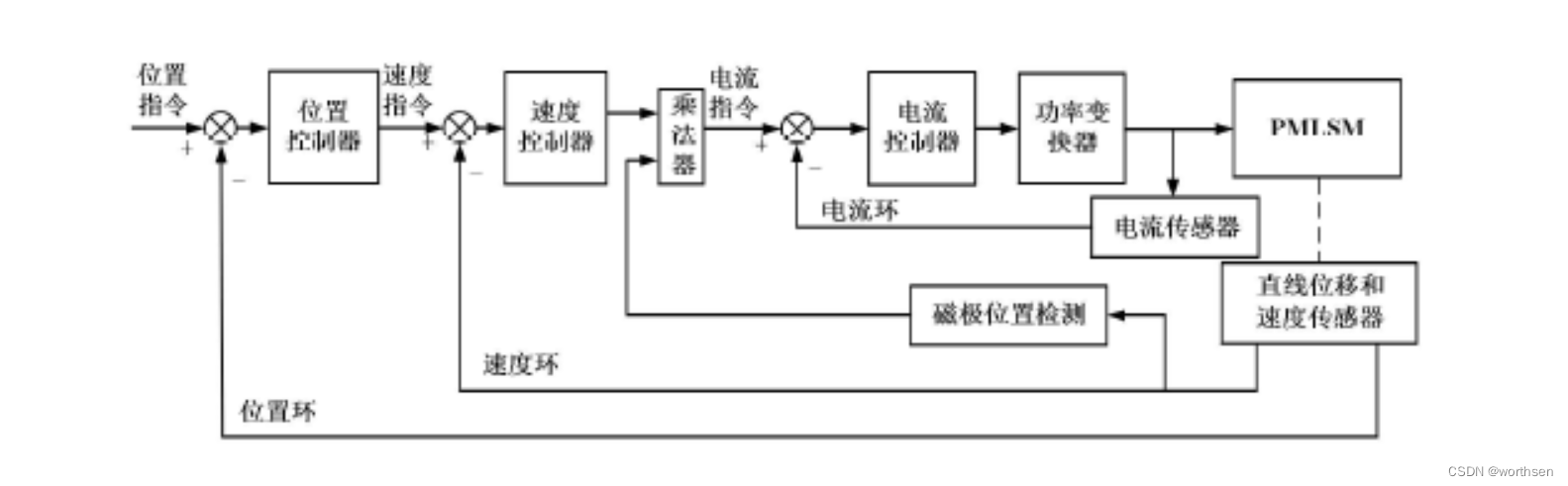
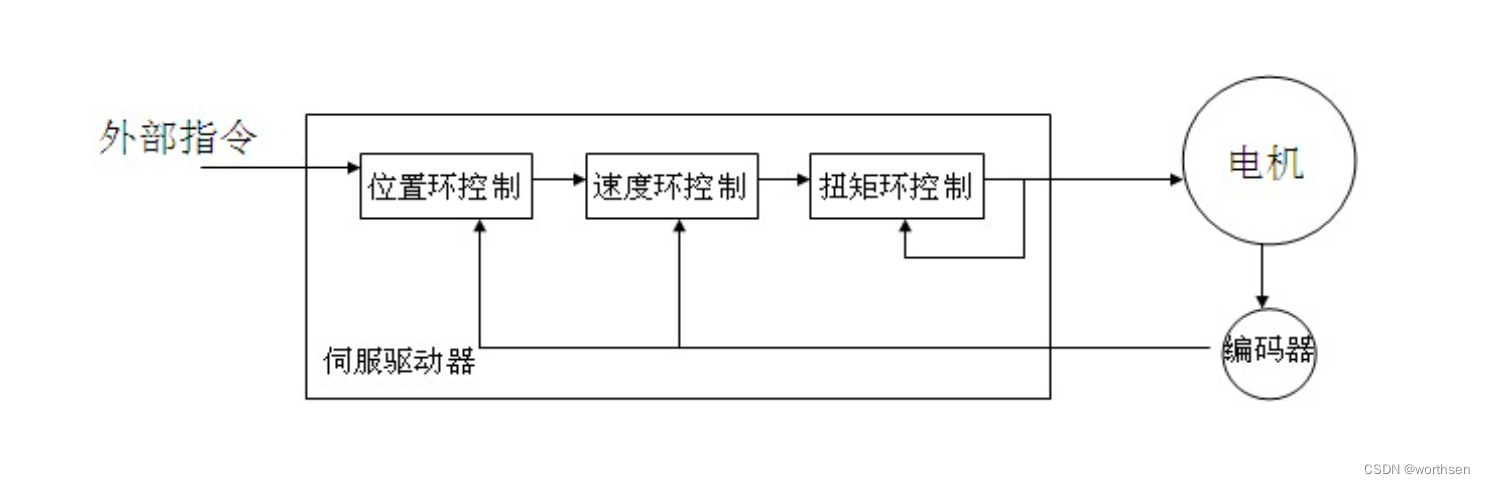
1 三环原理
1.1 电流环
此环完全在伺服驱动器内部进行,通过霍尔装置检测驱动器给电机的各相的输出电流,负反馈给电流的设定进行PID调节,从而达到输出电流尽量接近等于设定电流,电流环就是控制电机转矩的,所以在转矩模式下驱动器的运算最小,动态响应最快。
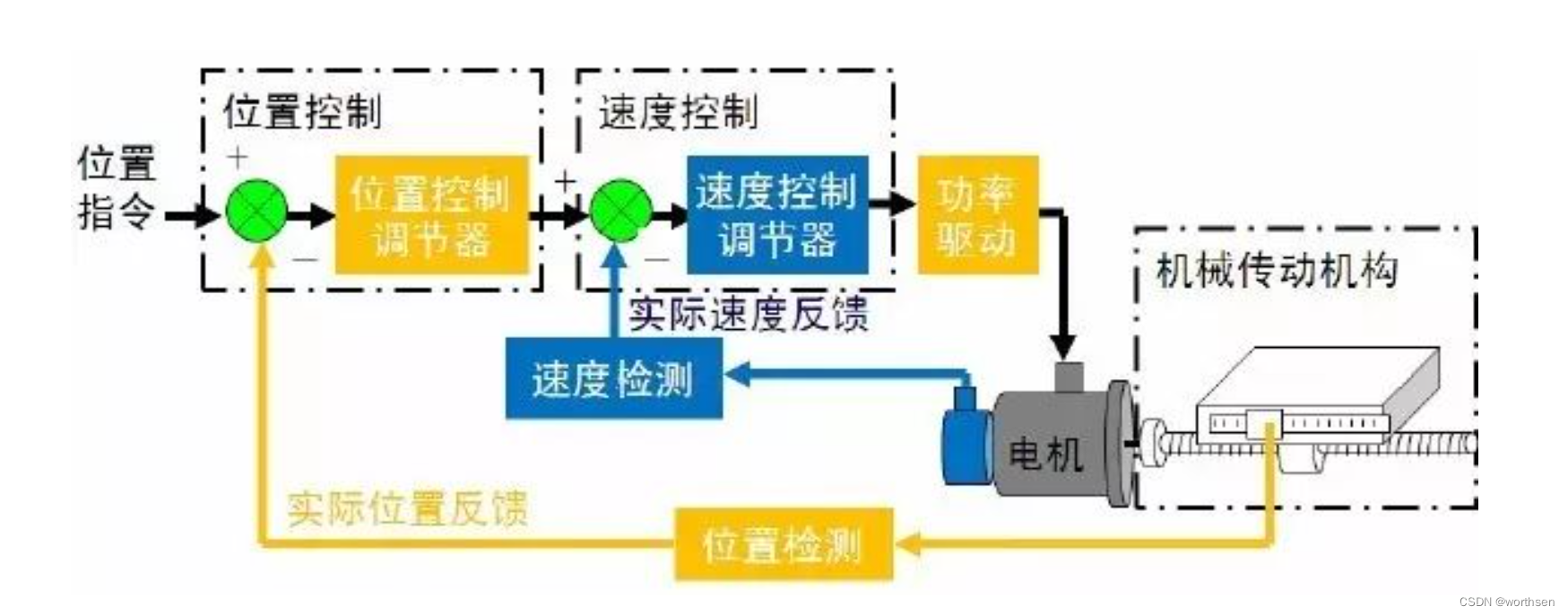
1.2 速度环
通过检测的伺服电机编码器的信号来进行负反馈 PID 调节,它的环内 PID 输出直接就是电流环的设定,所以速度环控制时就包合了速度环和电流环,换句话说任何形势都必须使用电流环,电流环是控制的根本,在速度和位置控制的同时系统实际也在进行电流(转矩)的控制以达到对速度和位置的相应控制。
1.3 位置环
它是最外环,可认在驱动器和伺服电机编码器间构建也可以在外部控制器和电机编码器或最终负载间构建,要根据实际情况来定。由于位置控制环内部输出就是速度环的设定,位置控制模式下系统进行了所有 3 个环的运算,此时的系统运算量最大,动态响应速度也最慢。
2 各环与PID控制
2.1 电流环重点在 PID(比例、积分和微分)
伺服的电流环的PID常数一般都是在驱动器内部设定好的,操作使用者不需要更改。
2.2 速度环重点在 PI(比例和积分)
比例就是增益,所以我们要对速度增益和速度积分时间常数进行合适的调节才能达到理想效果。
2.3 位置环重点在 P(比例)
我们只要设定位置环的比例增益就好了。当进行位置模式需要调节位置环时,最好先调节速度环,位置环、速度环的参数调节没有什么固定的数值,要根据外部负载的机械传动连接方式、负载的运动方式、负载惯量、对速度、加速度要求以及电机本身的转子惯量和输出惯量等等很多条件来决定,调节的简单方法是在根据外部负载的情况进行大体经验的范围内将增益参数从小往大调,积分时间常数从大往小调,以不出现震动超调的稳态值为最佳值进行设定。
2.4 PID各自对差值调节对系统的影响
单独的P(比例)
单独的P(比例)就是将差值进行成比例的运算,它的显著特点就是有差调节,有差的意义就是调节过程结束后,被调量不可能与设定值准确相等,它们之间一定有残差,残差具体值您可以通过比例关系计算出。增加比例将会有效减小残差并增加系统响应,但容易导致系统激烈震荡甚至不稳定。
单独的I(积分)
单独的I(积分)就是使调节器的输出信号的变化速度与差值信号成正比,大家不难理解,如果差值大,则积分环节的变化速度大,这个环节的正比常数的比例倒数我们在伺服系统里通常叫它为积分时间常数,积分时间常数越小意味着系统的变化速度越快,所以同样如果增大积分速度(也就是减小积分时间常数)将会降低控制系统的稳定程度,直到最后出现发散的震荡过程。这个环节最大的好处就是被调量最后是没有残差的。
PI(比例积分)
PI(比例积分)就是综合P和I的优点,利用P调节快速抵消干扰的影响,同时利用I调节消除残差。
单独的D(微分)
单独的D(微分)就是根据差值的方向和大小进行调节的,调节器的输出与差值对于时间的导数成正比,微分环节只能起到辅助的调节作用,它可以与其他调节结合成PD和PID调节。它的好处是可以根据被调节量(差值)的变化速度来进行调节,而不要等到出现了很大的偏差后才开始动作,其实就是赋予了调节器以某种程度上的预见性,可以增加系统对微小变化的响应特性。
2.5 整体经验
- 位置环、速度环的参数调节没有什么固定的数值,要根据外部负载的机械传动连接方式、负载的运动方式、负载惯量、对速度、加速度要求以及电机本身的转子惯量和输出惯量等等很多条件来决定,调节的简单方法是在根据外部负载的情况进行大体经验的范围内将增益参数从小往大调,积分时间常数从大往小调,以不出现震动超调的稳态值为最佳值进行设定。
- 当进行位置模式需要调节位置环时,最好先调节速度环(此时位置环的比例增益设定在经验值的最小值),调节速度环稳定后,再调节位置环增益,适量逐步增加,位置环的响应最好比速度环慢一点,不然也容易出现速度震荡。
3 控制方式
伺服电机位置控制是通过发脉冲来控制的,一般是通过外部输入的脉冲频率来确定转动速度的大小,通过脉冲的个数来确认转动的角度。
3.1 脉冲方式
上位机通过发送脉冲到伺服驱动器,来实现控制。在这种方式下,用脉冲频率来控制速度,用脉冲个数来控制位置。同样,伺服驱动器也会发送脉冲数,来告诉上位机,伺服电机的位置和速度。比如,我们约定伺服电机10000个脉冲旋转一圈,那么,当上位机发送10000个脉冲,伺服电机旋转一圈,实现位置控制。如果上位机在一分钟内发完这10000个脉冲,那么伺服电机的速度就是1r/min,如果实在一秒钟内发完,那么伺服电机的速度就是1r/s,也就是60r/min。
低端PLC,数控系统,以及各种单片机系统一般都是采用这种模式,简单易行,成本低廉。很显然,当伺服轴数增加,这种控制方式的缺点就会显现出来,上位机硬件成本会增加,配线会很复杂,而且现场EMC不好的话,脉冲极易丢失。所以,这种模式一般是在四轴以下,所以,大部分PLC的脉冲控制轴数都在两轴或是三轴,极少部分PLC可以实现四轴。
3.2 通讯方式
通讯方式就是专门为解决脉冲方式的不足而产生的,已经成为一种发展趋势,他把脉冲数和脉冲频率通过通讯的方式,发送给伺服驱动器,这种方式不但可以传递伺服电机的位置信息,还能传递各种状态信息,比如伺服电机的电流,扭矩以及伺服驱动器的故障代码等等,很显然,当轴数多的时候,这种方式的优势不言而喻。
由于运动控制的特殊性,所以不同的厂家都推出自己的运动控制总线,既有开放的,也有封闭的,比如CANopen,以及在此基础上开发的CANmotion和CANlink,MECHATROLINK-II,CCLink等等。随着工业以太网技术的发展,基于以太网的运动控制总线也应运而生,比如EtherCAT,ProfinetNet,MECHATROLINK-III等等。还有基于光纤的SERCOS,SSCNETⅢ/H等等。
虽然 通讯的形式繁多,但他们解决的一般都是实时性问题,因为对于运动控制来说,实时性是非常重要的。从应用开发的角度来说,脉冲和通讯是没有区别的,只是信号传递的形式发生了变化。
3.3 模拟量方式
在需要使用伺服电机实现速度控制的应用场景,我们可以选用模拟量来实现电机的速度控制,模拟量的值决定了电机的运行速度。模拟量有两种方式可以选择,电流或电压。
电压方式只需要在控制信号端加入一定大小的电压即可,在有些场景甚至使用一个电位器即可实现控制,非常的简单。但选用电压作为控制信号,在环境复杂的场景下,电压容易被干扰,造成控制不稳定。
电流方式需要对应的电流输出模块,但电流信号抗干扰能力强,可以使用在复杂的场景。
参考
1、ZLG–伺服电机三环控制系统调节方法浅谈
2、伺服电机三环控制系统调节方法浅谈 | 电机控制系统设计
3、伺服电机三环(电流环、速度环、位置环)控制原理及参数调节
4、伺服电机三环(电流环、速度环、位置环)控制原理及参数调节__yuan_的博客-CSDN博客_速度环和位置环的关系
5、# 伺服系统的3个控制与3个环
6、伺服控制六大注意事项,搞懂了也没什么难的!|常见问题解答|腾龙国际客服_19188322229
7、三个闭环负反馈PID调节系统:电流环、速度环和位置环的关系_JH17369320302的博客-CSDN博客_速度环和位置环的关系
8、【转】伺服电机三环控制的原理(位置环,运动环,电流环)_老孙的博客-CSDN博客_位置环控制算法
9、什么是伺服电机的电流环、速度环、位置环和带宽?_a张志鹏的博客-CSDN博客_电流环 速度环 位置环
10、# 伺服驱动器的电流环、速度环、位置环频率一般是多少?
11、伺服电机的电流环、速度环、位置环介绍
12、# 伺服电机控制