全文目录
- 概念
- 哈希冲突及原因
- 解决哈希冲突的方法
- 闭散列
- 线性探测
- 二次探测
- 扩容
- 开散列
- 扩容
- 哈希的应用
- 位图
- 布隆过滤器
概念
通过映射关系将关键字映射到存储位置,并实现增删改查操作。
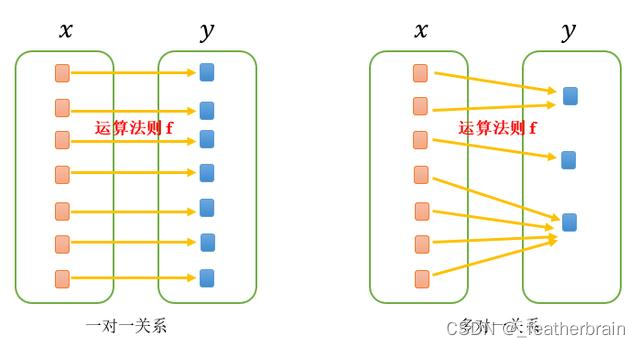
通过上面的方法构造出来的结构就叫哈希表(散列表),其中的映射关系叫做哈希函数
哈希冲突及原因
不同的关键字映射到同一个位置称为哈希冲突
原因:
哈希函数设计得不够合理
哈希函数设计原则:
- 哈希函数的定义域包括所有关键码,散列表的空间位 n,其值域为 [ 0 , m − 1 ] [0,m - 1] [0,m−1]
- 计算出来的地址均匀分布在整个散列表中
- 比较简单
其他类型哈希:
哈希函数需要将关键码进行取模操作,这就表示了当其他类型哈希时需要先将关键字转换为整型 —— 可以通过仿函数进行转换。
解决哈希冲突的方法
解决哈希冲突两种常见的方法是:闭散列和开散列
闭散列
闭散列:也叫开放定址法,当发生哈希冲突时,如果哈希表未被装满,说明在哈希表中必然还有空位置,那么可以把key存放到冲突位置中的“下一个” 空位置中去。
寻找“下一个”空位置的方法:线性探测和二次探测
线性探测
从发生冲突的位置开始,依次向后探测,直到寻找到下一个空位置为止。
缺点:
冲突连在一起容易发生数据堆积,不同的关键字占用了可利用的空位置,使得同一个效率下降,影响效率
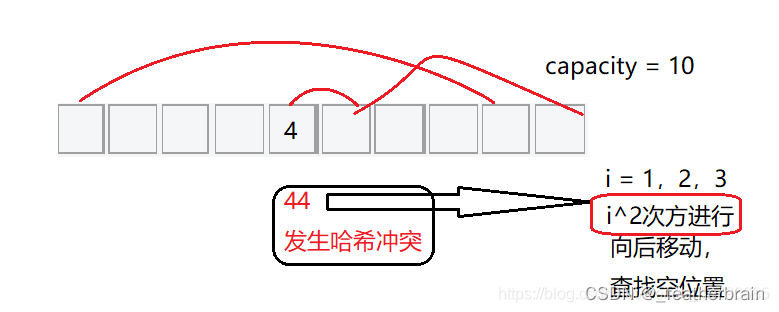
二次探测
线性探测造成数据堆积的原因是寻找空位置的方式,为了避免数据堆积,二次探测寻找下一个位置的方式为:
: H i = ( H 0 + i 2 ) % m H_i = (H_0 + i^2 ) \% m Hi=(H0+i2)%m, 或者: H i = ( H 0 − i 2 ) % m H_i = (H_0 - i^2 ) \% m Hi=(H0−i2)%m。其中: i = 1 , 2 , 3 … i = 1,2,3… i=1,2,3… , H 0 H_0 H0 是通过散列函数 H a s h ( x ) Hash(x) Hash(x) 对元素的关键码 k e y key key 进行计算得到的位置, m m m 是表的大小。
扩容
当哈希表的载荷因子达到一定大是进行扩容

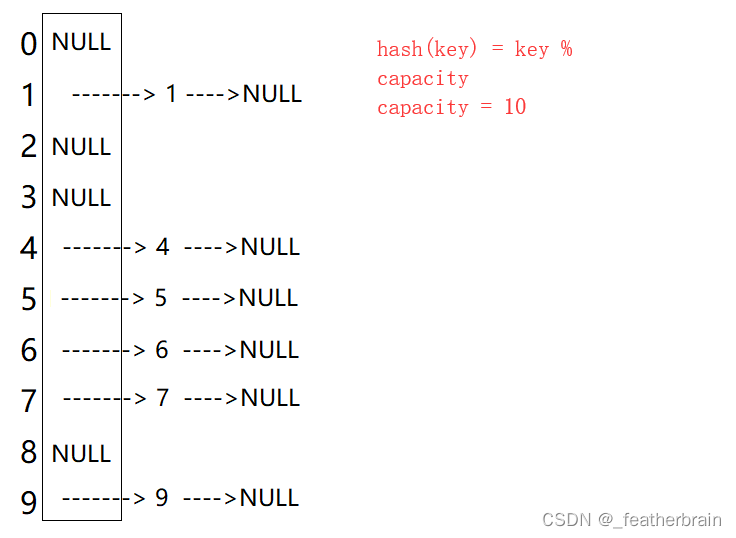
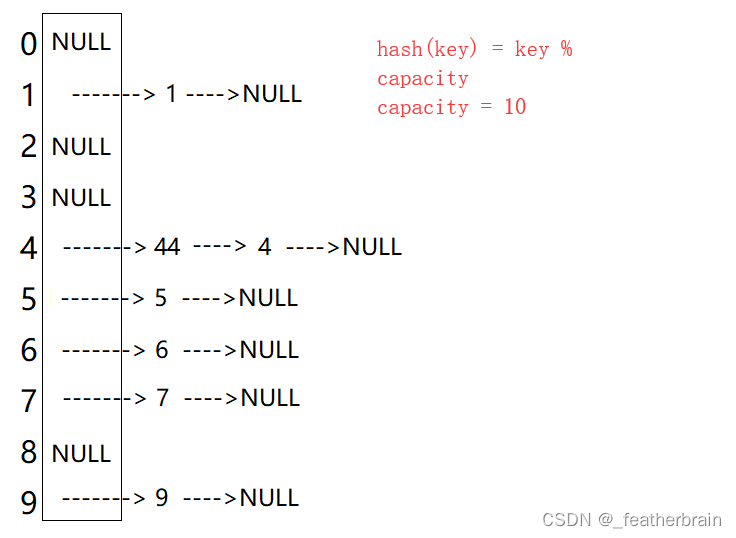
开散列
开散列法又叫链地址法(开链法),将相同地址的关键字分为一个集合称为桶,通过单链表将桶中的元素链接起来。
扩容
随着插入的增加,冲突的可能性越来越大即一个桶中节点越来越多,影响哈希表的性能。开散列最好的情况是每个哈希桶都只有一个节点,所以当 元素个数 = = 桶的个数 元素个数 == 桶的个数 元素个数==桶的个数 时进行扩容较为合理
哈希的应用
位图
用一个比特位来存放某种状态,用来快速判断某个数据在不在。
模拟实现:
template<size_t N = 100>
class bitset
{
public:
bitset(size_t n = N)
{
_bit.resize(N / 8 + 1, 0);
}
bitset& set(size_t x, bool val = true)
{
size_t i = x / 8;
size_t j = x % 8;
if (val)
{
_bit[i] |= 1 << j;
}
else
{
_bit[i] &= ~(1 << j);
}
return *this;
}
bitset& set()
{
vector<char> tmp(N / 8 + 1, 1);
_bit.swap(tmp);
return *this;
}
bitset& reset()
{
vector<char> tmp(N / 8 + 1, 0);
_bit.swap(tmp);
return *this;
}
bitset& reset(size_t x)
{
size_t i = x / 8;
size_t j = x % 8;
_bit[i] &= ~(1 << j);
return *this;
}
bool test(size_t x) const
{
size_t i = x / 8;
size_t j = x % 8;
return _bit[i] & (1 << j);
}
private:
vector<char> _bit;
size_t _size;
};
缺点:
一般只能处理整型
布隆过滤器
用来快速检索数据是否存在,弥补位图只能处理整型的缺憾。
原理:
通过多个哈希函数,将一个数据映射到位图结构中。
但是可能对存在的情况存在一定的误判,误判概率取决于哈希函数的个数和空间的大小:参考文档