PY32F003F18中有一个“数字比较器”,这是我的叫法,为了便于和模拟比较器区分。它用作PWM输出功能。
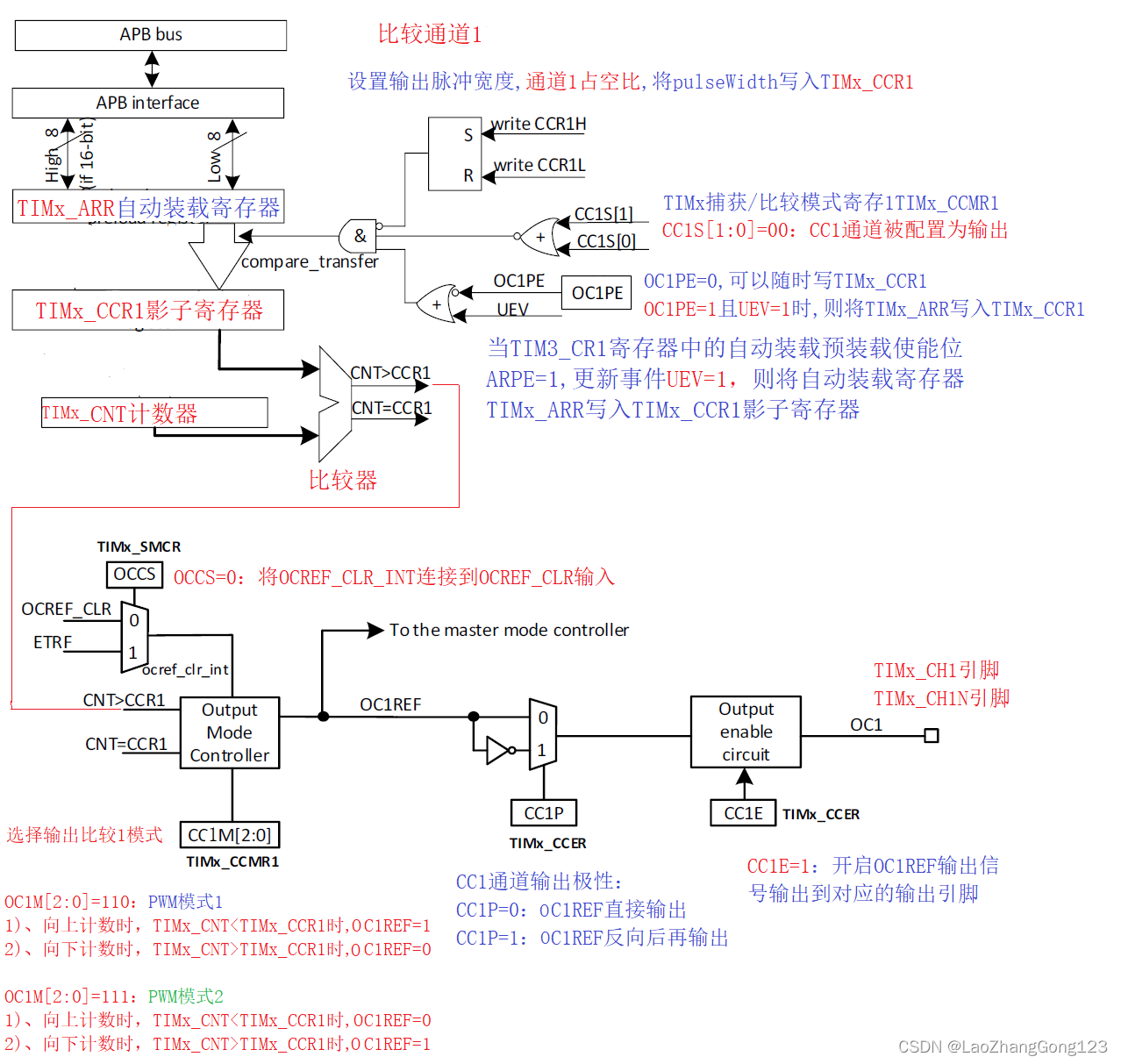
一、比较通道1电路图
二、PWM工作模式
PWM的工作模式:
1、PWM边沿对齐模式
计数器工作在"边沿对齐模式"
设置"TIMx控制寄存器1(TIMx_CR1)"的DIR和"TIMx控制寄存器1(TIMx_CR1)"的CMS[1:0];
CMS[1:0]=00,配置TIMx为边沿对齐模式,当DIR=0时,计数器向上计数;当DIR=1时,计数器向下计数;
2、PWM中央对齐模式1
3、PWM中央对齐模式2
4、PWM中央对齐模式3
在PWM中央对齐模式中,计数器从0开始计数到自动加载的值(TIMx_ARR 寄存器),会产生一个计数器溢出事件;然后向下计数,当计数器计数到1时,也会产生一个计数器下溢事件;然后再从0开始重新计数,这样循环往复开始计数。所以计数器中断时间不变。
计数器工作在"PWM中央对齐模式":
设置"TIMx控制寄存器1(TIMx_CR1)"的CMS[1:0];计数器工作在"中央对齐模式"
1)、CMS[1:0]=01,配置TIMx为中央对齐模式1,计数器交替地向上和向下计数;若配置为输出通道的,则在计数器向下计数时,"OCx的输出比较中断标志位"被置1;
2)、CMS[1:0]=10,配置TIMx为中央对齐模式2,计数器交替地向上和向下计数;若配置为输出通道的,则在计数器向上计数时,"OCx的输出比较中断标志位"被置1;
3)、CMS[1:0]=11,配置TIMx为中央对齐模式3,计数器交替地向上和向下计数;若配置为输出通道的,则在计数器向上/向下计数时,"OCx的输出比较中断标志位"被置1;
在"TIMx为中央对齐模式"时,向上计数时会出现一次TIMx_CNT<=TIMx_CCR1,向下计数时也会出现一次TIMx_CNT<=TIMx_CCR1,因此PWM输出脉宽为向上计数的2倍,周期也为原来周期的2倍;
计数器使用"内部时钟源"
如果从模式控制器被禁止,则CEN、DIR(TIMx_CR1 寄存器)和UG 位(TIMx_EGR 寄存器)是事实上
的控制位,并且只能被软件修改。只要CEN 位被写成1,预分频器的时钟就由内部时钟CK_INT 提供。
三、测试程序
#include "TIM1_PWM_ComplementaryOutput.h"
/*
计数器工作在"边沿对齐模式"
//将"TIMx控制寄存器1(TIMx_CR1)"的DIR=0
//将"TIMx控制寄存器1(TIMx_CR1)"的CMS[1:0]=00B
//CMS[1:0]=00,配置TIMx为边沿对齐模式,当DIR=0时,计数器向上计数;当DIR=1时,计数器向下计数;
计数器使用"内部时钟源"
如果从模式控制器被禁止,则CEN、DIR(TIMx_CR1 寄存器)和UG 位(TIMx_EGR 寄存器)是事实上
的控制位,并且只能被软件修改。只要CEN 位被写成1,预分频器的时钟就由内部时钟CK_INT 提供。
*/
void TIM1_PWM_ComplementaryOutput(void);
#define PERIOD_VALUE (uint32_t)(8000 ) //PWM输出周期值
#define PULSE1_VALUE (uint32_t)(PERIOD_VALUE*50/100) //输出比较1的值,这里使用50%的占空比
#define PULSE2_VALUE (uint32_t)(PERIOD_VALUE*25/100) //输出比较1的值,这里使用25%的占空比
#define PULSE3_VALUE (uint32_t)(PERIOD_VALUE*12.5/100) //输出比较1的值,这里使用12.5%的占空比
//函数功能:
//将PA3初始化为TIM1_CH1功能,用作OC1输出
//将PA0初始化为TIM1_CH1N功能,用作OC1N输出
void TIM1_OC1_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructureure;
__HAL_RCC_TIM1_CLK_ENABLE(); //使能TIM1时钟
__HAL_RCC_GPIOA_CLK_ENABLE(); //使能GPIOA时钟
GPIO_InitStructureure.Pin = GPIO_PIN_3; //选择第3脚,PA3是为TIM1_CH1
GPIO_InitStructureure.Mode = GPIO_MODE_AF_PP; //复用功能推挽模式
GPIO_InitStructureure.Pull = GPIO_PULLUP; //引脚上拉被激活
GPIO_InitStructureure.Speed = GPIO_SPEED_FREQ_VERY_HIGH; //引脚速度为最高速
GPIO_InitStructureure.Alternate = GPIO_AF13_TIM1; //选择AF13,将PA3引脚复用为TIM1_CH1
HAL_GPIO_Init(GPIOA, &GPIO_InitStructureure);
//根据GPIO_InitStructureure结构变量指定的参数初始化GPIOA的外设寄存器
//将PA3初始化为TIM1_CH1功能,用作OC1输出
GPIO_InitStructureure.Pin = GPIO_PIN_0; //选择第0脚,PA0是为TIM1_CH1N
GPIO_InitStructureure.Mode = GPIO_MODE_AF_PP; //复用功能推挽模式
GPIO_InitStructureure.Pull = GPIO_PULLUP; //引脚上拉被激活
GPIO_InitStructureure.Speed = GPIO_SPEED_FREQ_VERY_HIGH; //引脚速度为最高速
GPIO_InitStructureure.Alternate = GPIO_AF14_TIM1; //选择AF14,将PA0引脚复用为TIM1_CH1N
HAL_GPIO_Init(GPIOA, &GPIO_InitStructureure);
//根据GPIO_InitStructureure结构变量指定的参数初始化GPIOA的外设寄存器
//将PA0初始化为TIM1_CH1N功能,用作OC1N输出
}
//函数功能:配置TIM1 OC1的输出周期
//TIM1计数器在溢出时会重装ARR值
//arr:自动重装值。
//psc:时钟预分频数
//TIM1_OC1_Period_Config(20000,240);//若使用HSE,当arr=20000,psc=240时,则为200ms,误差为10us;
//TIM1_OC1_Period_Config(20000,80);//若使用HSI,当arr=20000,psc=80时,则为200ms,误差为10us;
void TIM1_OC1_Period_Config(uint16_t arr,uint16_t psc)
{
TIM_HandleTypeDef TIM1_HandleStructure;
TIM1_HandleStructure.Instance = TIM1; //选择TIM1
TIM1_HandleStructure.Init.Period = arr - 1;
//自动重装载值
//将TIM1_HandleStructure.Init.Period写入"TIMx自动重载入寄存器TIMx_ARR",设置自动重装载值;
TIM1_HandleStructure.Init.Prescaler = psc - 1;
//预分频为240-1
//将TIM1_HandleStructure.Init.Prescaler写入"预装载寄存器TIMx_PSC",设置预分频值
TIM1_HandleStructure.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
//时钟不分频
//将TIM1_HandleStructure.Init.ClockDivision写入TIM1控制寄存器1(TIM1_CR1)的CKD[1:0],则tDTS=tCK_INT
//若使用HSE,计算公式:arr*psc/24000000/1,当arr=20000,psc=240时,则为200ms,误差为10us;
//若使用HSI,计算公式:arr*psc/8000000/1,当arr=20000,psc=80时,则为200ms,误差为100us;
TIM1_HandleStructure.Init.CounterMode = TIM_COUNTERMODE_UP;
//向上计数
//将"TIMx控制寄存器1(TIMx_CR1)"的DIR=0
//将"TIMx控制寄存器1(TIMx_CR1)"的CMS[1:0]=00B
//CMS[1:0]=00,配置TIMx为边沿对齐模式,当DIR=0时,计数器向上计数;当DIR=1时,计数器向下计数;
TIM1_HandleStructure.Init.RepetitionCounter = 1 - 1;
//不重复计数
//将TIM1_HandleStructure.Init.RepetitionCounter写入"重复计数寄存器TIMx_RCR"中的REP[7:0],设置"重复计数器值"
TIM1_HandleStructure.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
//自动重装载寄存器没有缓冲
//根据TIM1_HandleStructure.Init.AutoReloadPreload,修改"TIMx控制寄存器1(TIM1_CR1)"的"自动重装载预装载允许位ARPE"
//TIM1_HandleStructure.Init.AutoReloadPreload=TIM_AUTORELOAD_PRELOAD_DISABLE,不允许将"TIMx自动重新加载寄存器TIMx_ARR"的值被装入缓冲区;
HAL_TIM_PWM_Init(&TIM1_HandleStructure);
//选择计数器模式:Structure->CounterMode=TIM_COUNTERMODE_UP,计数器向上计数
//设置时钟分频因子:Structure->ClockDivision=TIM_CLOCKDIVISION_DIV1,则tDTS=tCK_INT
//设置自动重装载:Structure->AutoReloadPreload=TIM_AUTORELOAD_PRELOAD_DISABLE,不允许将"TIMx自动重新加载寄存器TIMx_ARR"的值被装入缓冲区;
//设置自动重装载值:将Structure->Period写入"TIMx自动重载入寄存器TIMx_ARR",设置自动重装载值;
//设置预分频值:将Structure->Prescaler写入"预装载寄存器TIMx_PSC",的PSC[15:0],设置预分频值
//计数器的时钟频率CK_CNT=fCK_PSC/(PSC[15:0]+1)
//设置"重复计数器值":将Structure->RepetitionCounter写入"重复计数寄存器TIMx_RCR"中的REP[7:0],设置"重复计数器值"
//启动更新事件:
//将TIMx_EGR中的UG位置1,由软件产生更新事件
//若TIM1或TIM3在边沿对齐模式下,Structure->CounterMode=TIM_COUNTERMODE_UP,计数器向上计数,则将0被装入计数器
//若TIM1或TIM3在边沿对齐模式下,Structure->CounterMode=TIM_COUNTERMODE_DOWN,计数器向下计数,则将"TIMx自动重载入寄存器TIMx_ARR"的值被装入计数器
//若TIM1或TIM3在中央对齐模式下,Structure->CounterMode=TIM_COUNTERMODE_CENTERALIGNED1,交替地向上和向下计数,则将0被装入计数器
//若TIM1或TIM3在中央对齐模式下,Structure->CounterMode=TIM_COUNTERMODE_CENTERALIGNED2,交替地向上和向下计数,则将0被装入计数器
//若TIM1或TIM3在中央对齐模式下,Structure->CounterMode=TIM_COUNTERMODE_CENTERALIGNED3,交替地向上和向下计数,则将0被装入计数器
//TIM1或TIM3或TIM14或TIM16或TIM17将"预装载寄存器TIMx_PSC"装入"预分频器的缓存器"
//TIM1或TIM3或TIM14或TIM16或TIM17将"重复计数寄存器TIMx_RCR"中的内容装载到其影子寄存器"重复计数器缓存器"
}
//函数功能:
//配置"输出比较器1(通道1)"为PWM1模式,使能"TIM1_CH1和TIM1_CH1N输出",计数器不是触发模式,计数器使能,开始计数
void TIM1_OC1_PWM_Mode_Config(uint32_t pulseWidth)
{
TIM_HandleTypeDef TIM1_HandleStructure;
TIM_OC_InitTypeDef TIM_OC_InitStructure;
TIM1_HandleStructure.Instance = TIM1; //选择TIM1
TIM_OC_InitStructure.OCMode = TIM_OCMODE_PWM1; //配置为PWM1模式
TIM_OC_InitStructure.OCPolarity = TIM_OCPOLARITY_HIGH; //高电平有效,选择OC1REF直接输出(TIM1_CH1引脚输出,PA3)
TIM_OC_InitStructure.OCIdleState = TIM_OCIDLESTATE_SET; //OC1输出空闲状态为1,(TIM1_CH1引脚输出,PA3)
TIM_OC_InitStructure.OCNPolarity = TIM_OCNPOLARITY_HIGH; //高电平有效,选择OC1NREF直接输出(TIM1_CH1N引脚输出,PA0)
TIM_OC_InitStructure.OCNIdleState = TIM_OCNIDLESTATE_RESET;//OC1N输出空闲状态为0,(TIM1_CH1N引脚输出,PA0)
TIM_OC_InitStructure.OCFastMode = TIM_OCFAST_DISABLE; //关闭快速使能
TIM_OC_InitStructure.Pulse = pulseWidth;
//设置输出脉冲宽度,通道1占空比,将pulseWidth写入TIMx_CCR1
//当TIMx_CNT<=TIMx_CCR1时,OC1端口上输出设置的有效信号,本程序是"高电平有效"
HAL_TIM_PWM_ConfigChannel(&TIM1_HandleStructure,&TIM_OC_InitStructure, TIM_CHANNEL_1);
//配置"输出比较器1(通道1)"为PWM模式
//使能"输出比较器1"预装载
//sConfig->OCFastMode=1表示设置"输出比较器1"为快速模式
HAL_TIM_PWM_Start(&TIM1_HandleStructure, TIM_CHANNEL_1);
//Channel=TIM_CHANNEL_1,使能"TIM1_CH1输出",计数器不是触发模式,计数器使能,开始计数
HAL_TIMEx_PWMN_Start(&TIM1_HandleStructure, TIM_CHANNEL_1);
//Channel=TIM_CHANNEL_1,使能"TIM1_CH1N输出",计数器不是触发模式,计数器使能,开始计数
}
//函数功能:配置"输出比较器1(通道1)"为PWM1模式,使能"TIM1_CH1和TIM1_CH1N输出"
void TIM1_PWM_ComplementaryOutput(void)
{
TIM1_OC1_GPIO_Config();
//将PA3初始化为TIM1_CH1功能,用作OC1输出
//将PA0初始化为TIM1_CH1N功能,用作OC1N输出
TIM1_OC1_Period_Config(PERIOD_VALUE,240);//配置TIM1 OC1的输出周期
TIM1_OC1_PWM_Mode_Config(PULSE2_VALUE);
//配置"输出比较器1(通道1)"为PWM模式,使能"TIM1_CH1和TIM1_CH1N输出",计数器不是触发模式,计数器使能,开始计数
}#include "TIM1_Up_PWM_ComplementaryOutput.h"
/*
计数器工作在"边沿对齐模式"
//将"TIMx控制寄存器1(TIMx_CR1)"的DIR=0
//将"TIMx控制寄存器1(TIMx_CR1)"的CMS[1:0]=00B
//CMS[1:0]=00,配置TIMx为边沿对齐模式,当DIR=0时,计数器向上计数;当DIR=1时,计数器向下计数;
计数器使用"内部时钟源"
如果从模式控制器被禁止,则CEN、DIR(TIMx_CR1 寄存器)和UG 位(TIMx_EGR 寄存器)是事实上
的控制位,并且只能被软件修改。只要CEN 位被写成1,预分频器的时钟就由内部时钟CK_INT 提供。
*/
void TIM1_Up_PWM_ComplementaryOutput(void);
#define PERIOD_VALUE (uint32_t)(8000 ) //PWM输出周期值
#define PULSE1_VALUE (uint32_t)(PERIOD_VALUE*50/100) //输出比较1的值,这里使用50%的占空比
#define PULSE2_VALUE (uint32_t)(PERIOD_VALUE*25/100) //输出比较1的值,这里使用25%的占空比
#define PULSE3_VALUE (uint32_t)(PERIOD_VALUE*12.5/100) //输出比较1的值,这里使用12.5%的占空比
//函数功能:
//将PA3初始化为TIM1_CH1功能,用作OC1输出
//将PA0初始化为TIM1_CH1N功能,用作OC1N输出
void TIM1_OC1_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructureure;
__HAL_RCC_TIM1_CLK_ENABLE(); //使能TIM1时钟
__HAL_RCC_GPIOA_CLK_ENABLE(); //使能GPIOA时钟
GPIO_InitStructureure.Pin = GPIO_PIN_3; //选择第3脚,PA3是为TIM1_CH1
GPIO_InitStructureure.Mode = GPIO_MODE_AF_PP; //复用功能推挽模式
GPIO_InitStructureure.Pull = GPIO_PULLUP; //引脚上拉被激活
GPIO_InitStructureure.Speed = GPIO_SPEED_FREQ_VERY_HIGH; //引脚速度为最高速
GPIO_InitStructureure.Alternate = GPIO_AF13_TIM1; //选择AF13,将PA3引脚复用为TIM1_CH1
HAL_GPIO_Init(GPIOA, &GPIO_InitStructureure);
//根据GPIO_InitStructureure结构变量指定的参数初始化GPIOA的外设寄存器
//将PA3初始化为TIM1_CH1功能,用作OC1输出
GPIO_InitStructureure.Pin = GPIO_PIN_0; //选择第0脚,PA0是为TIM1_CH1N
GPIO_InitStructureure.Mode = GPIO_MODE_AF_PP; //复用功能推挽模式
GPIO_InitStructureure.Pull = GPIO_PULLUP; //引脚上拉被激活
GPIO_InitStructureure.Speed = GPIO_SPEED_FREQ_VERY_HIGH; //引脚速度为最高速
GPIO_InitStructureure.Alternate = GPIO_AF14_TIM1; //选择AF14,将PA0引脚复用为TIM1_CH1N
HAL_GPIO_Init(GPIOA, &GPIO_InitStructureure);
//根据GPIO_InitStructureure结构变量指定的参数初始化GPIOA的外设寄存器
//将PA0初始化为TIM1_CH1N功能,用作OC1N输出
}
//函数功能:配置TIM1 OC1的输出周期
//TIM1计数器在溢出时会重装ARR值
//arr:自动重装值。
//psc:时钟预分频数
//TIM1_OC1_Period_Config(20000,240);//若使用HSE,当arr=20000,psc=240时,则为200ms,误差为10us;
//TIM1_OC1_Period_Config(20000,80);//若使用HSI,当arr=20000,psc=80时,则为200ms,误差为10us;
void TIM1_OC1_Period_Config(uint16_t arr,uint16_t psc)
{
TIM_HandleTypeDef TIM1_HandleStructure;
TIM1_HandleStructure.Instance = TIM1; //选择TIM1
TIM1_HandleStructure.Init.Period = arr - 1;
//自动重装载值
//将TIM1_HandleStructure.Init.Period写入"TIMx自动重载入寄存器TIMx_ARR",设置自动重装载值;
TIM1_HandleStructure.Init.Prescaler = psc - 1;
//预分频为240-1
//将TIM1_HandleStructure.Init.Prescaler写入"预装载寄存器TIMx_PSC",设置预分频值
TIM1_HandleStructure.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
//时钟不分频
//将TIM1_HandleStructure.Init.ClockDivision写入TIM1控制寄存器1(TIM1_CR1)的CKD[1:0],则tDTS=tCK_INT
//若使用HSE,计算公式:arr*psc/24000000/1,当arr=20000,psc=240时,则为200ms,误差为10us;
//若使用HSI,计算公式:arr*psc/8000000/1,当arr=20000,psc=80时,则为200ms,误差为100us;
TIM1_HandleStructure.Init.CounterMode = TIM_COUNTERMODE_UP;
//向上计数
//将"TIMx控制寄存器1(TIMx_CR1)"的DIR=0
//将"TIMx控制寄存器1(TIMx_CR1)"的CMS[1:0]=00B
//CMS[1:0]=00,配置TIMx为边沿对齐模式,当DIR=0时,计数器向上计数;当DIR=1时,计数器向下计数;
TIM1_HandleStructure.Init.RepetitionCounter = 1 - 1;
//不重复计数
//将TIM1_HandleStructure.Init.RepetitionCounter写入"重复计数寄存器TIMx_RCR"中的REP[7:0],设置"重复计数器值"
TIM1_HandleStructure.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
//自动重装载寄存器没有缓冲
//根据TIM1_HandleStructure.Init.AutoReloadPreload,修改"TIMx控制寄存器1(TIM1_CR1)"的"自动重装载预装载允许位ARPE"
//TIM1_HandleStructure.Init.AutoReloadPreload=TIM_AUTORELOAD_PRELOAD_DISABLE,不允许将"TIMx自动重新加载寄存器TIMx_ARR"的值被装入缓冲区;
HAL_TIM_PWM_Init(&TIM1_HandleStructure);
//选择计数器模式:Structure->CounterMode=TIM_COUNTERMODE_UP,计数器向上计数
//设置时钟分频因子:Structure->ClockDivision=TIM_CLOCKDIVISION_DIV1,则tDTS=tCK_INT
//设置自动重装载:Structure->AutoReloadPreload=TIM_AUTORELOAD_PRELOAD_DISABLE,不允许将"TIMx自动重新加载寄存器TIMx_ARR"的值被装入缓冲区;
//设置自动重装载值:将Structure->Period写入"TIMx自动重载入寄存器TIMx_ARR",设置自动重装载值;
//设置预分频值:将Structure->Prescaler写入"预装载寄存器TIMx_PSC",的PSC[15:0],设置预分频值
//计数器的时钟频率CK_CNT=fCK_PSC/(PSC[15:0]+1)
//设置"重复计数器值":将Structure->RepetitionCounter写入"重复计数寄存器TIMx_RCR"中的REP[7:0],设置"重复计数器值"
//启动更新事件:
//将TIMx_EGR中的UG位置1,由软件产生更新事件
//若TIM1或TIM3在边沿对齐模式下,Structure->CounterMode=TIM_COUNTERMODE_UP,计数器向上计数,则将0被装入计数器
//若TIM1或TIM3在边沿对齐模式下,Structure->CounterMode=TIM_COUNTERMODE_DOWN,计数器向下计数,则将"TIMx自动重载入寄存器TIMx_ARR"的值被装入计数器
//若TIM1或TIM3在中央对齐模式下,Structure->CounterMode=TIM_COUNTERMODE_CENTERALIGNED1,交替地向上和向下计数,则将0被装入计数器
//若TIM1或TIM3在中央对齐模式下,Structure->CounterMode=TIM_COUNTERMODE_CENTERALIGNED2,交替地向上和向下计数,则将0被装入计数器
//若TIM1或TIM3在中央对齐模式下,Structure->CounterMode=TIM_COUNTERMODE_CENTERALIGNED3,交替地向上和向下计数,则将0被装入计数器
//TIM1或TIM3或TIM14或TIM16或TIM17将"预装载寄存器TIMx_PSC"装入"预分频器的缓存器"
//TIM1或TIM3或TIM14或TIM16或TIM17将"重复计数寄存器TIMx_RCR"中的内容装载到其影子寄存器"重复计数器缓存器"
}
//函数功能:
//配置"输出比较器1(通道1)"为PWM1模式,使能"TIM1_CH1和TIM1_CH1N输出",计数器不是触发模式,计数器使能,开始计数
void TIM1_OC1_PWM_Mode_Config(uint32_t pulseWidth)
{
TIM_HandleTypeDef TIM1_HandleStructure;
TIM_OC_InitTypeDef TIM_OC_InitStructure;
TIM1_HandleStructure.Instance = TIM1; //选择TIM1
TIM_OC_InitStructure.OCMode = TIM_OCMODE_PWM1; //配置为PWM1模式
TIM_OC_InitStructure.OCPolarity = TIM_OCPOLARITY_HIGH; //高电平有效,选择OC1REF直接输出(TIM1_CH1引脚输出,PA3)
TIM_OC_InitStructure.OCIdleState = TIM_OCIDLESTATE_SET; //OC1输出空闲状态为1,(TIM1_CH1引脚输出,PA3)
TIM_OC_InitStructure.OCNPolarity = TIM_OCNPOLARITY_HIGH; //高电平有效,选择OC1NREF直接输出(TIM1_CH1N引脚输出,PA0)
TIM_OC_InitStructure.OCNIdleState = TIM_OCNIDLESTATE_RESET;//OC1N输出空闲状态为0,(TIM1_CH1N引脚输出,PA0)
TIM_OC_InitStructure.OCFastMode = TIM_OCFAST_DISABLE; //关闭快速使能
TIM_OC_InitStructure.Pulse = pulseWidth;
//设置输出脉冲宽度,通道1占空比,将pulseWidth写入TIMx_CCR1
//当TIMx_CNT<=TIMx_CCR1时,OC1端口上输出设置的有效信号,本程序是"高电平有效"
HAL_TIM_PWM_ConfigChannel(&TIM1_HandleStructure,&TIM_OC_InitStructure, TIM_CHANNEL_1);
//配置"输出比较器1(通道1)"为PWM模式
//使能"输出比较器1"预装载
//sConfig->OCFastMode=1表示设置"输出比较器1"为快速模式
HAL_TIM_PWM_Start(&TIM1_HandleStructure, TIM_CHANNEL_1);
//Channel=TIM_CHANNEL_1,使能"TIM1_CH1输出",计数器不是触发模式,计数器使能,开始计数
HAL_TIMEx_PWMN_Start(&TIM1_HandleStructure, TIM_CHANNEL_1);
//Channel=TIM_CHANNEL_1,使能"TIM1_CH1N输出",计数器不是触发模式,计数器使能,开始计数
}
//函数功能:配置"输出比较器1(通道1)"为PWM1模式,使能"TIM1_CH1和TIM1_CH1N输出"
void TIM1_Up_PWM_ComplementaryOutput(void)
{
TIM1_OC1_GPIO_Config();
//将PA3初始化为TIM1_CH1功能,用作OC1输出
//将PA0初始化为TIM1_CH1N功能,用作OC1N输出
TIM1_OC1_Period_Config(PERIOD_VALUE,240);//配置TIM1 OC1的输出周期
TIM1_OC1_PWM_Mode_Config(PULSE2_VALUE);
//配置"输出比较器1(通道1)"为PWM模式,使能"TIM1_CH1和TIM1_CH1N输出",计数器不是触发模式,计数器使能,开始计数
}四、测试结果

五、PWM1"捕获/比较1中断"测试
添加下面的代码,就可以测试"捕获/比较1中断"
//函数功能:允许"捕获/比较1中断"
void TIM1_Up_Down_PWM_Interrupt(void)
{
HAL_NVIC_SetPriority(TIM1_CC_IRQn, 0, 0); //设置中断优先级
HAL_NVIC_EnableIRQ(TIM1_CC_IRQn); //允许"捕获/比较1中断"
_HAL_TIM_ENABLE_IT(TIM1, TIM_IT_CC1);
//将"TIMx DMA/中断使能寄存器TIM3_DIER"的CC1IE=1,允许"捕获/比较1中断"
}
//函数功能:配置"输出比较器1(通道1)"为PWM1模式,使能"TIM1_CH1和TIM1_CH1N输出"
void TIM1_Up_Down_PWM_ComplementaryOutput(void)
{
TIM1_OC1_GPIO_Config();
//将PA3初始化为TIM1_CH1功能,用作OC1输出
//将PA0初始化为TIM1_CH1N功能,用作OC1N输出
TIM1_OC1_Period_Config(PERIOD_VALUE,240);//配置TIM1 OC1的输出周期
TIM1_Up_Down_PWM_Interrupt();//允许"捕获/比较1中断"
TIM1_OC1_PWM_Mode_Config(PULSE2_VALUE);
//配置"输出比较器1(通道1)"为PWM模式,使能"TIM1_CH1和TIM1_CH1N输出",计数器不是触发模式,计数器使能,开始计数
}
#ifndef __MyTimer_H
#define __MyTimer_H
#include "py32f0xx_hal.h"
#define _HAL_TIM_ENABLE(__INSTANCE__) ((__INSTANCE__)->CR1|=(TIM_CR1_CEN))
//计数器使能,开始计数
#define _HAL_TIM_DISABLE(__INSTANCE__) \
do { \
if (((__INSTANCE__)->CCER & TIM_CCER_CCxE_MASK) == 0UL) \
{ \
if(((__INSTANCE__)->CCER & TIM_CCER_CCxNE_MASK) == 0UL) \
{ \
(__INSTANCE__)->CR1 &= ~(TIM_CR1_CEN); \
} \
} \
} while(0)
//计数器不使能,停止计数
#define _HAL_TIM_MOE_ENABLE(__INSTANCE__) ((__INSTANCE__)->BDTR|=(TIM_BDTR_MOE))
//将"TIMx刹车和死区寄存器(TIMx_BDTR)"中的MOE=1,开启OCx和OCxN输出,即使能"TIMx_CH1和TIMx_CH1N"输出
#define _HAL_TIM_MOE_DISABLE_UNCONDITIONALLY(__INSTANCE__) (__INSTANCE__)->BDTR &= ~(TIM_BDTR_MOE)
//将"TIMx刹车和死区寄存器(TIMx_BDTR)"中的MOE=0,关闭OCx和OCxN输出,即不使能"TIMx_CH1和TIMx_CH1N"输出
#define _HAL_TIM_MOE_DISABLE(__INSTANCE__) \
do { \
if (((__INSTANCE__)->CCER & TIM_CCER_CCxE_MASK) == 0UL) \
{ \
if(((__INSTANCE__)->CCER & TIM_CCER_CCxNE_MASK) == 0UL) \
{ \
(__INSTANCE__)->BDTR &= ~(TIM_BDTR_MOE); \
} \
} \
} while(0)
//在"TIMx捕获/比较使能寄存器TIMx_CCER"中,如果"OCx禁止输出或捕获禁止",且"OCxNE禁止输出"
//则将"TIMx刹车和死区寄存器(TIMx_BDTR)"中的MOE=0,关闭OCx和OCxN输出,即不使能"TIMx_CH1和TIMx_CH1N"输出
#define _HAL_TIM_ENABLE_IT(__INSTANCE__, __INTERRUPT__) ((__INSTANCE__)->DIER |= (__INTERRUPT__))
//根据__INTERRUPT__,将TIMx DMA/中断使能寄存器(TIM3_DIER)的对应位置1,使能相应的中断
//TIM_IT_UPDATE,允许定时器更新中断,UIE=1
//TIM_IT_CC1,允许捕获/比较1中断,CC1IE=1
//TIM_IT_CC2,允许捕获/比较2中断,CC2IE=1
//TIM_IT_CC3,允许捕获/比较3中断,CC3IE=1
//TIM_IT_CC4,允许捕获/比较4中断,CC4IE=1
//TIM_IT_COM,允许COM事件中断,COMIE=1
//TIM_IT_TRIGGER,允许触发中断,TIE=1
//TIM_IT_BREAK,允许刹车中断,BIE=1
#define _HAL_TIM_DISABLE_IT(__INSTANCE__, __INTERRUPT__) ((__INSTANCE__)->DIER &= ~(__INTERRUPT__))
//根据__INTERRUPT__,将TIMx DMA/中断使能寄存器(TIM3_DIER)的对应位清除,不使能相应的中断
//TIM_IT_UPDATE,禁止定时器更新中断,UIE=0
//TIM_IT_CC1,禁止捕获/比较1中断,CC1IE=0
//TIM_IT_CC2,禁止捕获/比较2中断,CC2IE=0
//TIM_IT_CC3,禁止捕获/比较3中断,CC3IE=0
//TIM_IT_CC4,禁止捕获/比较4中断,CC4IE=0
//TIM_IT_COM,禁止COM事件中断,COMIE=0
//TIM_IT_TRIGGER,禁止触发中断,TIE=0
//TIM_IT_BREAK,禁止刹车中断,BIE=0
#define _HAL_TIM_ENABLE_DMA(__INSTANCE__, __DMA__) ((__INSTANCE__)->DIER |= (__DMA__))
//根据__INTERRUPT__,将TIMx DMA/中断使能寄存器(TIMx_DIER)的对应位置1,使能相应的DMA请求
//TIM_DMA_UPDATE,允许更新的DMA请求,UDE=1
//TIM_DMA_CC1,允许捕获/比较1的DMA请求,CC1DE=1
//TIM_DMA_CC2,允许捕获/比较2的DMA请求,CC2DE=1
//TIM_DMA_CC3,允许捕获/比较3的DMA请求,CC3DE=1
//TIM_DMA_CC4,允许捕获/比较4的DMA请求,CC4DE=1
//TIM_DMA_COM,允许COM的DMA请求,COMDE=1
//TIM_DMA_TRIGGER,允许触发DMA请求,TDE=1
#define _HAL_TIM_DISABLE_DMA(__INSTANCE__, __DMA__) ((__INSTANCE__)->DIER &= ~(__DMA__))
//根据__INTERRUPT__,将TIMx DMA/中断使能寄存器(TIMx_DIER)的对应位置1,不使能相应的DMA请求
//TIM_DMA_UPDATE,禁止更新的DMA请求,UDE=0
//TIM_DMA_CC1,禁止捕获/比较1的DMA请求,CC1DE=0
//TIM_DMA_CC2,禁止捕获/比较2的DMA请求,CC2DE=0
//TIM_DMA_CC3,禁止捕获/比较3的DMA请求,CC3DE=0
//TIM_DMA_CC4,禁止捕获/比较4的DMA请求,CC4DE=0
//TIM_DMA_COM,禁止COM的DMA请求,COMDE=0
//TIM_DMA_TRIGGER,禁止触发DMA请求,TDE=0
#define _HAL_TIM_GET_FLAG(__INSTANCE__, __FLAG__) (((__INSTANCE__)->SR &(__FLAG__)) == (__FLAG__))
//根据__FLAG__,若"TIMx状态寄存器(TIMx_SR)"中相应的位置1,则返回1
//TIM_FLAG_UPDATE,若UIF=1,建立"更新事件"
//TIM_FLAG_CC1,若CC1IF=1,如果通道CC1配置为输出模式,则建立"CC1输出事件";
//TIM_FLAG_CC1,若CC1IF=1,如果通道CC1配置为输入模式,则建立"CC1捕获事件"
//TIM_FLAG_CC2,若CC2IF=1,如果通道CC2配置为输出模式,则建立"CC2输出事件";
//TIM_FLAG_CC2,若CC2IF=1,如果通道CC2配置为输入模式,则建立"CC2捕获事件"
//TIM_FLAG_CC3,若CC3IF=1,如果通道CC3配置为输出模式,则建立"CC3输出事件";
//TIM_FLAG_CC3,若CC3IF=1,如果通道CC3配置为输入模式,则建立"CC3捕获事件"
//TIM_FLAG_CC4,若CC4IF=1,如果通道CC4配置为输出模式,则建立"CC4输出事件";
//TIM_FLAG_CC4,若CC4IF=1,如果通道CC4配置为输入模式,则建立"CC4捕获事件";
//TIM_FLAG_COM,若COMIF=1,则建立"COM事件"
//TIM_FLAG_TRIGGER,若TIF=1,则建立"触发事件"
//TIM_FLAG_BREAK,若BIF=1,则建立"刹车事件"
//TIM_FLAG_CC1OF,若CC1OF=1,则表示"计数器x的值被捕获到TIMx_CCR1寄存器"
//TIM_FLAG_CC2OF,若CC2OF=1,则表示"计数器x的值被捕获到TIMx_CCR2寄存器"
//TIM_FLAG_CC3OF,若CC3OF=1,则表示"计数器x的值被捕获到TIMx_CCR3寄存器"
//TIM_FLAG_CC4OF,若CC4OF=1,则表示"计数器x的值被捕获到TIMx_CCR4寄存器"
#define _HAL_TIM_CLEAR_FLAG(__INSTANCE__, __FLAG__) ((__INSTANCE__)->SR = ~(__FLAG__))
//这么写的原因,因为定时器只能做某一种功能,不能同时实现多种功能
//根据__FLAG__,若"TIMx状态寄存器(TIMx_SR)"中相应的位置0,则返回1
//TIM_FLAG_UPDATE,若UIF=1,建立"更新事件"
//TIM_FLAG_CC1,令CC1IF=0,如果通道CC1配置为输出模式,则清除"CC1输出事件";
//TIM_FLAG_CC1,令CC1IF=0,如果通道CC1配置为输入模式,则清除"CC1捕获事件"
//TIM_FLAG_CC2,令CC2IF=0,如果通道CC2配置为输出模式,则清除"CC2输出事件";
//TIM_FLAG_CC2,令CC2IF=0,如果通道CC2配置为输入模式,则清除"CC2捕获事件"
//TIM_FLAG_CC3,令CC3IF=0,如果通道CC3配置为输出模式,则清除"CC3输出事件";
//TIM_FLAG_CC3,令CC3IF=0,如果通道CC3配置为输入模式,则清除"CC3捕获事件"
//TIM_FLAG_CC4,令CC4IF=0,如果通道CC4配置为输出模式,则清除"CC4输出事件";
//TIM_FLAG_CC4,令CC4IF=0,如果通道CC4配置为输入模式,则清除"CC4捕获事件";
//TIM_FLAG_COM,令COMIF=0,则清除"COM事件"
//TIM_FLAG_TRIGGER,令TIF=0,则清除"触发事件"
//TIM_FLAG_BREAK,令BIF=0,则清除"刹车事件"
//TIM_FLAG_CC1OF,令CC1OF=0,则清除建立的事件(计数器x的值被捕获到TIMx_CCR1寄存器)
//TIM_FLAG_CC2OF,令CC2OF=0,则清除建立的事件(计数器x的值被捕获到TIMx_CCR2寄存器)
//TIM_FLAG_CC3OF,令CC3OF=0,则清除建立的事件(计数器x的值被捕获到TIMx_CCR3寄存器)
//TIM_FLAG_CC4OF,令CC4OF=0,则清除建立的事件(计数器x的值被捕获到TIMx_CCR4寄存器)
#define _HAL_TIM_GET_IT_SOURCE(__INSTANCE__, __INTERRUPT__) ((((__INSTANCE__)->DIER & (__INTERRUPT__)) \
== (__INTERRUPT__)) ? SET : RESET)
//根据__INTERRUPT__,若"TIMx DMA/中断使能寄存器(TIM3_DIER)的对应位置1,则返回1
//TIM_IT_UPDATE,若UIE=1,返回1,当前允许定时器更新中断
//TIM_IT_CC1,若CC1IE=1,返回1,当前允许捕获/比较1中断
//TIM_IT_CC2,若CC2IE=1,返回1,当前允许捕获/比较2中断
//TIM_IT_CC3,若CC3IE=1,返回1,当前允许捕获/比较3中断
//TIM_IT_CC4,若CC4IE=1,返回1,当前允许捕获/比较4中断
//TIM_IT_COM,若COMIE=1,返回1,当前允许COM事件中断
//TIM_IT_TRIGGER,若TIE=1,返回1,当前允许触发中断
//TIM_IT_BREAK,若BIE=1,返回1,当前允许刹车中断
#define _HAL_TIM_CLEAR_IT(__INSTANCE__, __INTERRUPT__) ((__INSTANCE__)->SR = ~(__INTERRUPT__))
//根据__INTERRUPT__,将"TIMx状态寄存器(TIMx_SR)"中相应的位置0,取消中断标志位
//TIM_IT_UPDATE,令UIE=0,不允许定时器更新中断
//TIM_IT_CC1,令CC1IE=0,不允许捕获/比较1中断
//TIM_IT_CC2,令CC2IE=0,不允许捕获/比较2中断
//TIM_IT_CC3,令CC3IE=0,不允许捕获/比较3中断
//TIM_IT_CC4,令CC4IE=0,不允许捕获/比较4中断
//TIM_IT_COM,令COMIE=0,不允许COM事件中断
//TIM_IT_TRIGGER,令TIE=0,不允许触发中断
//TIM_IT_BREAK,令BIE=0,不允许刹车中断
#define _HAL_TIM_IS_TIM_COUNTING_DOWN(__INSTANCE__) (((__INSTANCE__)->CR1 &(TIM_CR1_DIR)) == (TIM_CR1_DIR))
//读"TIMx控制寄存器1(TIMx_CR1)"的DIR位,若返回值为1,则表示该计数器为向下计数;否则为向上计数
#define _HAL_TIM_SET_PRESCALER(__INSTANCE__, __PRESC__) ((__INSTANCE__)->PSC = (__PRESC__))
//将(__PRESC__)写入"预装载寄存器TIMx_PSC",的PSC[15:0],设置预分频值
//计数器的时钟频率CK_CNT=fCK_PSC/(PSC[15:0]+1)
#define _HAL_TIM_SET_COUNTER(__INSTANCE__, __COUNTER__) ((__INSTANCE__)->CNT = (__COUNTER__))
//将(__COUNTER__)的值写入"TIMx计数器(TIMx_CNT)"
#define _HAL_TIM_GET_COUNTER(__INSTANCE__) ((__INSTANCE__)->CNT)
//读"TIMx计数器(TIMx_CNT)"的值
#define _HAL_TIM_SET_AUTORELOAD(__INSTANCE__, __AUTORELOAD__) \
do{ \
(__INSTANCE__)->ARR = (__AUTORELOAD__); \
} while(0)
//将(__AUTORELOAD__)写入"自动重载入寄存器TIMx_ARR",设置自动重装载值
#define _HAL_TIM_GET_AUTORELOAD(__INSTANCE__) ((__INSTANCE__)->ARR)
//从"自动重载入寄存器TIMx_ARR"中,读取"自动重装载值"
#define _HAL_TIM_SET_CLOCKDIVISION(__INSTANCE__, __CKD__) \
do{ \
(__INSTANCE__)->CR1 &= (~TIM_CR1_CKD); \
(__INSTANCE__)->CR1 |= (__CKD__); \
} while(0)
//设置"时钟分频因子"
//将TIM1控制寄存器1(TIM1_CR1)的CKD[1:0]置00B
//TIM_CLOCKDIVISION_DIV1,则(__CKD__)=00B:时钟分频因子tDTS=tCK_INT
//TIM_CLOCKDIVISION_DIV2,则((__CKD__)=01B:时钟分频因子tDTS=2*tCK_INT
//TIM_CLOCKDIVISION_DIV4,则((__CKD__)=10B:时钟分频因子tDTS=4*tCK_INT
#define _HAL_TIM_GET_CLOCKDIVISION(__INSTANCE__) ((__INSTANCE__)->CR1 & TIM_CR1_CKD)
//从"TIMx控制寄存器1(TIM1_CR1)"中,读取CKD[1:0]位值,就是"时钟分频因子"
//将TIM1控制寄存器1(TIM1_CR1)的CKD[1:0]置00B
//返回值为TIM_CLOCKDIVISION_DIV1,表示时钟分频因子tDTS=tCK_INT
//返回值为TIM_CLOCKDIVISION_DIV2,表示时钟分频因子tDTS=2*tCK_INT
//返回值为TIM_CLOCKDIVISION_DIV4,表示时钟分频因子tDTS=4*tCK_INT
#define TIMx_RESET_ICPRESCALERVALUE(__INSTANCE__, __CHANNEL__) \
( ( (__CHANNEL__) == TIM_CHANNEL_1) ? ( (__INSTANCE__)->CCMR1 &= ~TIM_CCMR1_IC1PSC ) :\
( (__CHANNEL__) == TIM_CHANNEL_2) ? ( (__INSTANCE__)->CCMR1 &= ~TIM_CCMR1_IC2PSC ) :\
( (__CHANNEL__) == TIM_CHANNEL_3) ? ( (__INSTANCE__)->CCMR2 &= ~TIM_CCMR2_IC3PSC ) :\
( (__INSTANCE__)->CCMR2 &= ~TIM_CCMR2_IC4PSC ) )
//设置"输入捕获模式,Input Capture mode"
//如果(__CHANNEL__)为TIM_CHANNEL_1,则清除"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的输入/捕获1预分频器C1PSC[1:0]
//如果(__CHANNEL__)为TIM_CHANNEL_2,则清除"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的输入/捕获2预分频器C2PSC[1:0]
//如果(__CHANNEL__)为TIM_CHANNEL_3,则清除"TIMx捕获/比较模式寄存器1(TIMx_CCMR2)"中的输入/捕获3预分频器C3PSC[1:0]
#define TIMx_SET_ICPRESCALERVALUE(__INSTANCE__, __CHANNEL__, __ICPSC__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__INSTANCE__)->CCMR1 |= (__ICPSC__)) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__INSTANCE__)->CCMR1 |= ((__ICPSC__) << 8U)) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__INSTANCE__)->CCMR2 |= (__ICPSC__)) :\
((__INSTANCE__)->CCMR2 |= ((__ICPSC__) << 8U)))
//设置"输入捕获模式,Input Capture mode"
//若(__CHANNEL__)=TIM_CHANNEL_1,则用(__ICPSC__)设置"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的输入/捕获1预分频器C1PSC[1:0]
//若(__CHANNEL__)=TIM_CHANNEL_2,则(__ICPSC__)设置"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的输入/捕获2预分频器C2PSC[1:0]
//若(__CHANNEL__)=TIM_CHANNEL_3,则(__ICPSC__)设置"TIMx捕获/比较模式寄存器2(TIMx_CCMR2)"中的输入/捕获3预分频器C3PSC[1:0]
#define _HAL_TIM_GET_ICPRESCALER(__INSTANCE__, __CHANNEL__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__INSTANCE__)->CCMR1 & TIM_CCMR1_IC1PSC) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? (((__INSTANCE__)->CCMR1 & TIM_CCMR1_IC2PSC) >> 8U) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__INSTANCE__)->CCMR2 & TIM_CCMR2_IC3PSC) :\
(((__INSTANCE__)->CCMR2 & TIM_CCMR2_IC4PSC)) >> 8U)
//在"输入捕获模式"中,
//若(__CHANNEL__)=TIM_CHANNEL_1,则读取"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的输入/捕获1预分频器C1PSC[1:0]
//若(__CHANNEL__)=TIM_CHANNEL_2,则读取"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的输入/捕获2预分频器C2PSC[1:0]
//若(__CHANNEL__)=TIM_CHANNEL_3,则读取"TIMx捕获/比较模式寄存器2(TIMx_CCMR2)"中的输入/捕获3预分频器C3PSC[1:0]
#define _HAL_TIM_SET_COMPARE(__INSTANCE__, __CHANNEL__, __COMPARE__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__INSTANCE__)->CCR1 = (__COMPARE__)) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__INSTANCE__)->CCR2 = (__COMPARE__)) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__INSTANCE__)->CCR3 = (__COMPARE__)) :\
((__INSTANCE__)->CCR4 = (__COMPARE__)))
//设置"CCx的预装载值":
//若(__CHANNEL__)=TIM_CHANNEL_1,则将(__COMPARE__)写入TIMx捕获/比较寄存器1(TIMx_CCR1)中的CCR1[15:0],表示预装载值
//若(__CHANNEL__)=TIM_CHANNEL_2,则将(__COMPARE__)写入TIMx捕获/比较寄存器2(TIMx_CCR2)中的CCR2[15:0],表示预装载值
//若(__CHANNEL__)=TIM_CHANNEL_3,则将(__COMPARE__)写入TIMx捕获/比较寄存器3(TIMx_CCR3)中的CCR3[15:0],表示预装载值
//若(__CHANNEL__)=TIM_CHANNEL_4,则将(__COMPARE__)写入TIMx捕获/比较寄存器4(TIMx_CCR4)中的CCR3[15:0],表示预装载值
#define _HAL_TIM_GET_COMPARE(__INSTANCE__, __CHANNEL__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__INSTANCE__)->CCR1) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__INSTANCE__)->CCR2) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__INSTANCE__)->CCR3) :\
((__INSTANCE__)->CCR4))
//读取"CCx的预装载值":
//若(__CHANNEL__)=TIM_CHANNEL_1,则从TIMx捕获/比较寄存器1(TIMx_CCR1)中的CCR1[15:0]读取预装载值
//若(__CHANNEL__)=TIM_CHANNEL_2,则从TIMx捕获/比较寄存器2(TIMx_CCR2)中的CCR2[15:0]读取预装载值
//若(__CHANNEL__)=TIM_CHANNEL_3,则从TIMx捕获/比较寄存器3(TIMx_CCR3)中的CCR3[15:0]读取预装载值
//若(__CHANNEL__)=TIM_CHANNEL_4,则从TIMx捕获/比较寄存器3(TIMx_CCR4)中的CCR3[15:0]读取预装载值
#define _HAL_TIM_ENABLE_OCxPRELOAD(__INSTANCE__, __CHANNEL__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__INSTANCE__)->CCMR1 |= TIM_CCMR1_OC1PE) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__INSTANCE__)->CCMR1 |= TIM_CCMR1_OC2PE) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__INSTANCE__)->CCMR2 |= TIM_CCMR2_OC3PE) :\
((__INSTANCE__)->CCMR2 |= TIM_CCMR2_OC4PE))
//开启TIMx_CCRy寄存器的预装载功能
//若(__CHANNEL__)=TIM_CHANNEL_1,则将"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的OC1PE位置1,开启TIMx_CCR1寄存器的预装载功能
//若(__CHANNEL__)=TIM_CHANNEL_2,则将"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的OC2PE位置1,开启TIMx_CCR2寄存器的预装载功能
//若(__CHANNEL__)=TIM_CHANNEL_3,则将"TIMx捕获/比较模式寄存器2(TIMx_CCMR2)"中的OC3PE位置1,开启TIMx_CCR3寄存器的预装载功能
//若(__CHANNEL__)=TIM_CHANNEL_4,则将"TIMx捕获/比较模式寄存器2(TIMx_CCMR2)"中的OC4PE位置1,开启TIMx_CCR4寄存器的预装载功能
#define _HAL_TIM_DISABLE_OCxPRELOAD(__INSTANCE__, __CHANNEL__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__INSTANCE__)->CCMR1 &= ~TIM_CCMR1_OC1PE) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__INSTANCE__)->CCMR1 &= ~TIM_CCMR1_OC2PE) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__INSTANCE__)->CCMR2 &= ~TIM_CCMR2_OC3PE) :\
((__INSTANCE__)->CCMR2 &= ~TIM_CCMR2_OC4PE))
//禁止TIMx_CCRy寄存器的预装载功能
//若(__CHANNEL__)=TIM_CHANNEL_1,则将"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的OC1PE位置0,禁止TIMx_CCR1寄存器的预装载功能
//若(__CHANNEL__)=TIM_CHANNEL_2,则将"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的OC2PE位置0,禁止TIMx_CCR2寄存器的预装载功能
//若(__CHANNEL__)=TIM_CHANNEL_3,则将"TIMx捕获/比较模式寄存器2(TIMx_CCMR2)"中的OC3PE位置0,禁止TIMx_CCR3寄存器的预装载功能
//若(__CHANNEL__)=TIM_CHANNEL_4,则将"TIMx捕获/比较模式寄存器2(TIMx_CCMR2)"中的OC4PE位置0,禁止TIMx_CCR4寄存器的预装载功能
#define _HAL_TIM_ENABLE_OCxFAST(__INSTANCE__, __CHANNEL__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__INSTANCE__)->CCMR1 |= TIM_CCMR1_OC1FE) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__INSTANCE__)->CCMR1 |= TIM_CCMR1_OC2FE) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__INSTANCE__)->CCMR2 |= TIM_CCMR2_OC3FE) :\
((__INSTANCE__)->CCMR2 |= TIM_CCMR2_OC4FE))
//开启"比较x快速输出"功能,加快CCx输出对触发器x输入事件的响应
//若(__CHANNEL__)=TIM_CHANNEL_1,则将"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的OC1FE位置1,开启"比较1快速输出"功能
//若(__CHANNEL__)=TIM_CHANNEL_2,则将"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的OC2FE位置1,开启"比较2快速输出"功能
//若(__CHANNEL__)=TIM_CHANNEL_3,则将"TIMx捕获/比较模式寄存器2(TIMx_CCMR2)"中的OC3FE位置1,开启"比较3快速输出"功能
//若(__CHANNEL__)=TIM_CHANNEL_4,则将"TIMx捕获/比较模式寄存器2(TIMx_CCMR2)"中的OC4FE位置1,开启"比较4快速输出"功能
#define _HAL_TIM_DISABLE_OCxFAST(__INSTANCE__, __CHANNEL__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__INSTANCE__)->CCMR1 &= ~TIM_CCMR1_OC1FE) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__INSTANCE__)->CCMR1 &= ~TIM_CCMR1_OC2FE) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__INSTANCE__)->CCMR2 &= ~TIM_CCMR2_OC3FE) :\
((__INSTANCE__)->CCMR2 &= ~TIM_CCMR2_OC4FE))
//禁止"比较x快速输出"功能,不用加快CC输出对触发器输入事件的响应
//若(__CHANNEL__)=TIM_CHANNEL_1,则将"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的OC1FE位置0,禁止"比较1快速输出"功能
//若(__CHANNEL__)=TIM_CHANNEL_2,则将"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的OC2FE位置0,禁止"比较2快速输出"功能
//若(__CHANNEL__)=TIM_CHANNEL_3,则将"TIMx捕获/比较模式寄存器2(TIMx_CCMR2)"中的OC3FE位置0,禁止"比较3快速输出"功能
//若(__CHANNEL__)=TIM_CHANNEL_4,则将"TIMx捕获/比较模式寄存器2(TIMx_CCMR2)"中的OC4FE位置0,禁止"比较4快速输出"功能
#define _HAL_TIM_URS_ENABLE(__INSTANCE__) ((__INSTANCE__)->CR1|= TIM_CR1_URS)
//将"TIMx控制寄存器1(TIM1_CR1)"中的URS位置1
//允许在"计数器溢出/下溢"时,产生一个更新中断或DMA请求;
#define _HAL_TIM_URS_DISABLE(__INSTANCE__) ((__INSTANCE__)->CR1&=~TIM_CR1_URS)
//将"TIMx控制寄存器1(TIM1_CR1)"中的URS位置0
//允许在"计数器溢出/下溢"时,产生一个更新中断或DMA请求;
//允许在"TIMx_EGR中的UG位置1"时,产生一个更新中断或DMA请求;
//允许在"从模式控制器产生更新"时,产生一个更新中断或DMA请求;
#define _HAL_TIM_SET_ICPRESCALER(__INSTANCE__, __CHANNEL__, __ICPSC__) \
do{ \
TIMx_RESET_ICPRESCALERVALUE((__INSTANCE__), (__CHANNEL__)); \
TIMx_SET_ICPRESCALERVALUE((__INSTANCE__), (__CHANNEL__), (__ICPSC__)); \
} while(0)
//使用(__ICPSC__)设置通道为(__CHANNEL__)的"输入捕获预分频器"的值
//设置"输入捕获模式,Input Capture mode"
//如果(__CHANNEL__)为TIM_CHANNEL_1,则清除"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的输入/捕获1预分频器C1PSC[1:0]
//如果(__CHANNEL__)为TIM_CHANNEL_2,则清除"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的输入/捕获2预分频器C2PSC[1:0]
//如果(__CHANNEL__)为TIM_CHANNEL_3,则清除"TIMx捕获/比较模式寄存器1(TIMx_CCMR2)"中的输入/捕获3预分频器C3PSC[1:0]
//设置"输入捕获模式,Input Capture mode"
//若(__CHANNEL__)=TIM_CHANNEL_1,则用(__ICPSC__)设置"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的输入/捕获1预分频器C1PSC[1:0]
//若(__CHANNEL__)=TIM_CHANNEL_2,则(__ICPSC__)设置"TIMx捕获/比较模式寄存器1(TIMx_CCMR1)"中的输入/捕获2预分频器C2PSC[1:0]
//若(__CHANNEL__)=TIM_CHANNEL_3,则(__ICPSC__)设置"TIMx捕获/比较模式寄存器2(TIMx_CCMR2)"中的输入/捕获3预分频器C3PSC[1:0]
#define TIMx_RESET_CAPTUREPOLARITY(__INSTANCE__, __CHANNEL__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__INSTANCE__)->CCER &= ~(TIM_CCER_CC1P | TIM_CCER_CC1NP)) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__INSTANCE__)->CCER &= ~(TIM_CCER_CC2P | TIM_CCER_CC2NP)) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__INSTANCE__)->CCER &= ~(TIM_CCER_CC3P | TIM_CCER_CC3NP)) :\
((__INSTANCE__)->CCER &= ~(TIM_CCER_CC4P | TIM_CCER_CC4NP)))
//设置"输入/捕获x的输出极性"
//TIMx捕获/比较使能寄存器(TIMx_CCER)
//当(__CHANNEL__)=TIM_CHANNEL_1,(__POLARITY__)=TIM_CCER_CC1P时,令CC1P=0;CC1P=0表示"输入/捕获1输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_1,(__POLARITY__)=TIM_CCER_CC1NP时,令CC1NP=0;CC1NP=0表示"输入/捕获1互补输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_2,(__POLARITY__)=TIM_CCER_CC2P时,令CC2P=0;CC2P=0表示"输入/捕获2输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_2,(__POLARITY__)=TIM_CCER_CC2NP时,令CC2NP=0;CC2NP=0表示"输入/捕获2互补输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_3,(__POLARITY__)=TIM_CCER_CC3P时,令CC3P=0;CC3P=0表示"输入/捕获3输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_3,(__POLARITY__)=TIM_CCER_CC3NP时,令CC3NP=0;CC3NP=0表示"输入/捕获3互补输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_4,(__POLARITY__)=TIM_CCER_CC4P时,令CC4P=0;CC4P=0表示"输入/捕获4输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_4,(__POLARITY__)=TIM_CCER_CC4NP时,令CC4NP=0;CC4NP=0表示"输入/捕获4互补输出极性"为高电平有效,否则为低电平有效
#define TIMx_SET_CAPTUREPOLARITY(__INSTANCE__, __CHANNEL__, __POLARITY__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__INSTANCE__)->CCER |= (__POLARITY__)) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__INSTANCE__)->CCER |= ((__POLARITY__) << 4U)) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__INSTANCE__)->CCER |= ((__POLARITY__) << 8U)) :\
((__INSTANCE__)->CCER |= (((__POLARITY__) << 12U))))
//设置"输入/捕获x的输出极性"
//TIMx捕获/比较使能寄存器(TIMx_CCER)
//当(__CHANNEL__)=TIM_CHANNEL_1,(__POLARITY__)=TIM_CCER_CC1P时,令CC1P=1;CC1P=0表示"输入/捕获1输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_1,(__POLARITY__)=TIM_CCER_CC1NP时,令CC1NP=1;CC1NP=0表示"输入/捕获1互补输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_2,(__POLARITY__)=TIM_CCER_CC2P时,令CC2P=1;CC2P=0表示"输入/捕获2输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_2,(__POLARITY__)=TIM_CCER_CC2NP时,令CC2NP=1;CC2NP=0表示"输入/捕获2互补输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_3,(__POLARITY__)=TIM_CCER_CC3P时,令CC3P=1;CC3P=0表示"输入/捕获3输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_3,(__POLARITY__)=TIM_CCER_CC3NP时,令CC3NP=1;CC3NP=0表示"输入/捕获3互补输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_4,(__POLARITY__)=TIM_CCER_CC4P时,令CC4P=1;CC4P=0表示"输入/捕获4输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_4,(__POLARITY__)=TIM_CCER_CC4NP时,令CC4NP=1;CC4NP=0表示"输入/捕获4互补输出极性"为高电平有效,否则为低电平有效
#define _HAL_TIM_SET_CAPTUREPOLARITY(__INSTANCE__, __CHANNEL__, __POLARITY__) \
do{ \
TIMx_RESET_CAPTUREPOLARITY((__INSTANCE__), (__CHANNEL__)); \
TIMx_SET_CAPTUREPOLARITY((__INSTANCE__), (__CHANNEL__), (__POLARITY__)); \
}while(0)
//设置"输入/捕获x的输出极性"
//TIMx捕获/比较使能寄存器(TIMx_CCER)
//当(__CHANNEL__)=TIM_CHANNEL_1,(__POLARITY__)=TIM_CCER_CC1P时,令CC1P=0;CC1P=0表示"输入/捕获1输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_1,(__POLARITY__)=TIM_CCER_CC1NP时,令CC1NP=0;CC1NP=0表示"输入/捕获1互补输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_2,(__POLARITY__)=TIM_CCER_CC2P时,令CC2P=0;CC2P=0表示"输入/捕获2输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_2,(__POLARITY__)=TIM_CCER_CC2NP时,令CC2NP=0;CC2NP=0表示"输入/捕获2互补输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_3,(__POLARITY__)=TIM_CCER_CC3P时,令CC3P=0;CC3P=0表示"输入/捕获3输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_3,(__POLARITY__)=TIM_CCER_CC3NP时,令CC3NP=0;CC3NP=0表示"输入/捕获3互补输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_4,(__POLARITY__)=TIM_CCER_CC4P时,令CC4P=0;CC4P=0表示"输入/捕获4输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_4,(__POLARITY__)=TIM_CCER_CC4NP时,令CC4NP=0;CC4NP=0表示"输入/捕获4互补输出极性"为高电平有效,否则为低电平有效
//设置"输入/捕获x的输出极性"
//TIMx捕获/比较使能寄存器(TIMx_CCER)
//当(__CHANNEL__)=TIM_CHANNEL_1,(__POLARITY__)=TIM_CCER_CC1P时,令CC1P=1;CC1P=0表示"输入/捕获1输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_1,(__POLARITY__)=TIM_CCER_CC1NP时,令CC1NP=1;CC1NP=0表示"输入/捕获1互补输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_2,(__POLARITY__)=TIM_CCER_CC2P时,令CC2P=1;CC2P=0表示"输入/捕获2输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_2,(__POLARITY__)=TIM_CCER_CC2NP时,令CC2NP=1;CC2NP=0表示"输入/捕获2互补输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_3,(__POLARITY__)=TIM_CCER_CC3P时,令CC3P=1;CC3P=0表示"输入/捕获3输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_3,(__POLARITY__)=TIM_CCER_CC3NP时,令CC3NP=1;CC3NP=0表示"输入/捕获3互补输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_4,(__POLARITY__)=TIM_CCER_CC4P时,令CC4P=1;CC4P=0表示"输入/捕获4输出极性"为高电平有效,否则为低电平有效
//当(__CHANNEL__)=TIM_CHANNEL_4,(__POLARITY__)=TIM_CCER_CC4NP时,令CC4NP=1;CC4NP=0表示"输入/捕获4互补输出极性"为高电平有效,否则为低电平有效
#endif /* __MyTimer_H */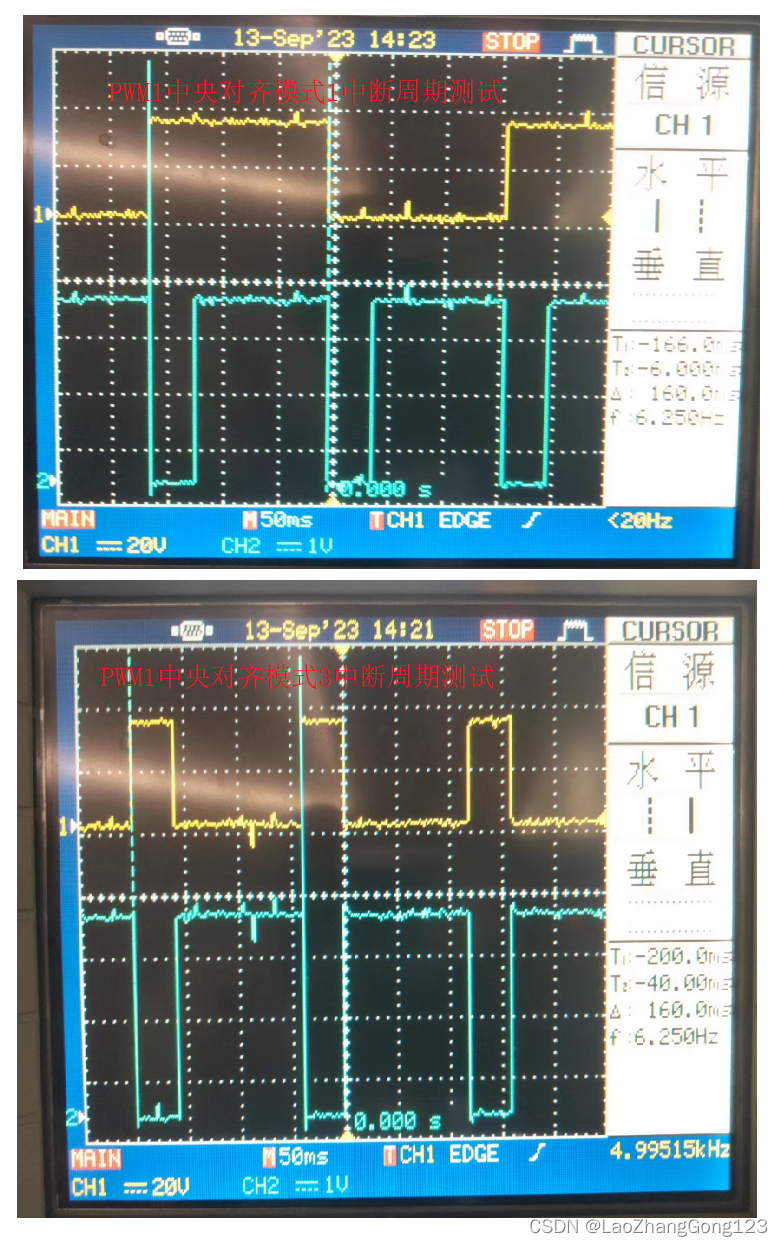
六、结论
看着很长的代码,很累吧。累就对了,我整理也很累。为了减少TIM使用全局变量,我自己另外添加了类似标准库的用法。