PWM简介
PWM(Pulse Width Modulation)即脉冲宽度调制,通过对脉冲的宽度进行调制,来获得所需要波形
PWM参数
- 周期
一次高低电平所占用的时间
- 占空比
一个周期中高电平时间与整个周期的比例称为占空比
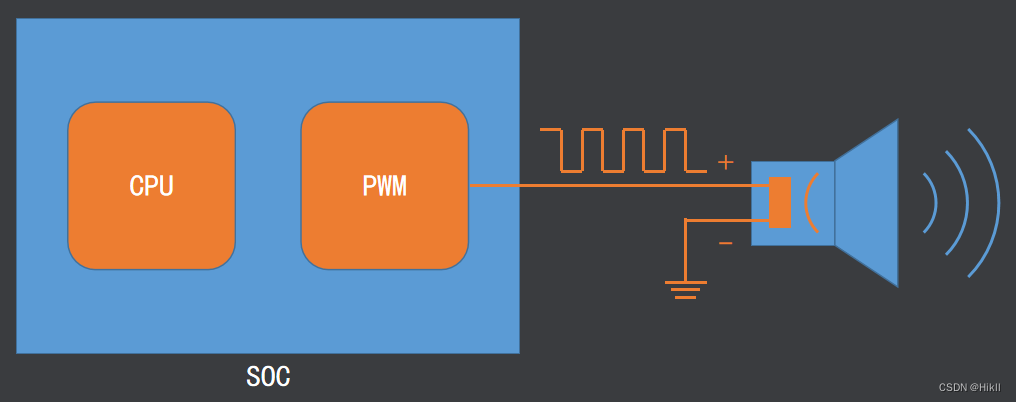
PWM工作原理
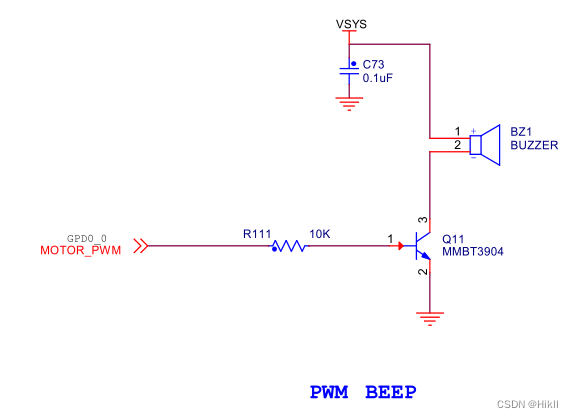
pwm原理图
由电路原理图可知道蜂鸣器接在GPD0_0引脚上
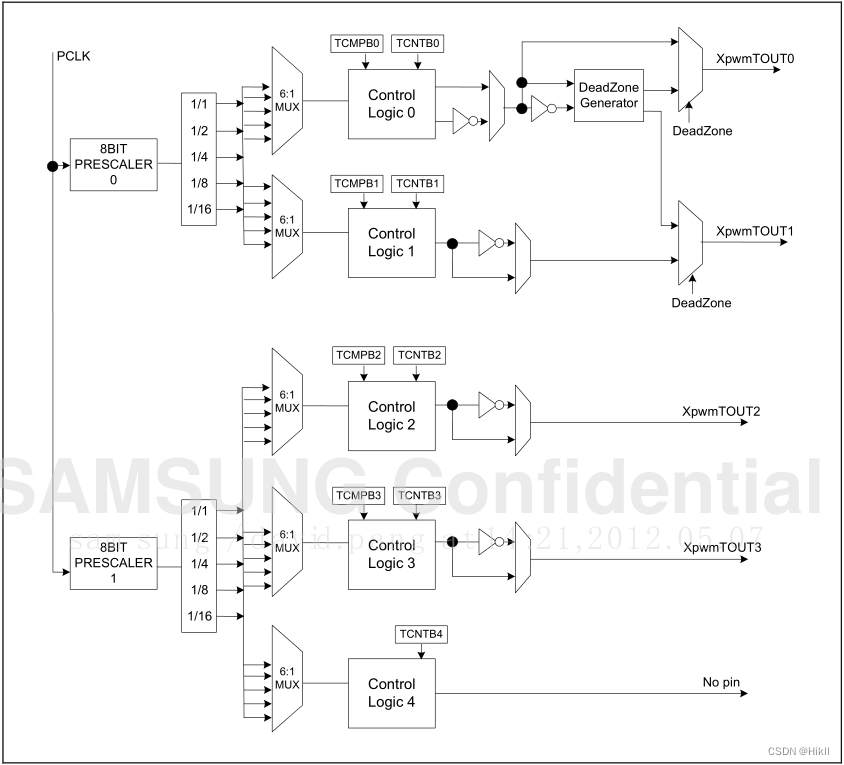
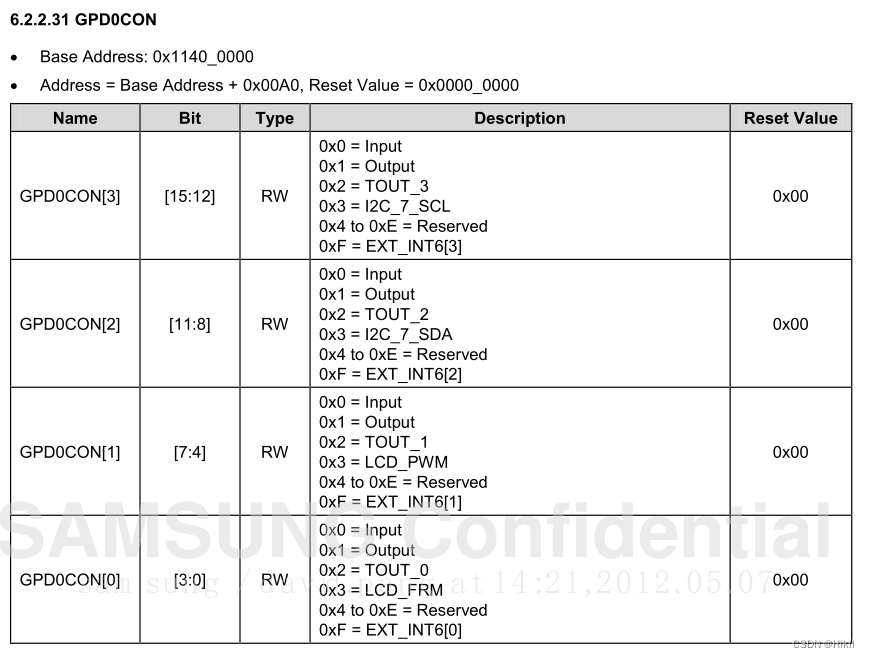
GPIO配置
配置GPD0_0引脚为PWM模式,即TOUT_0
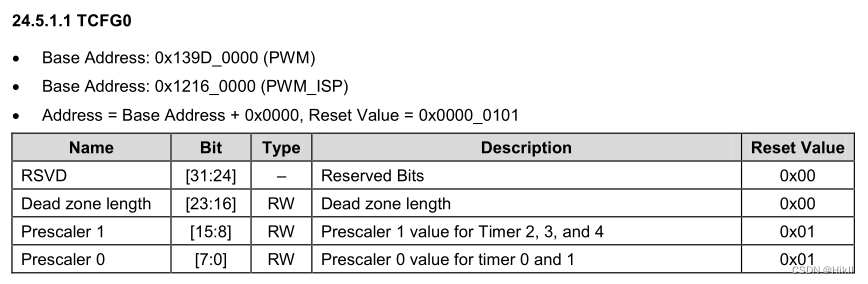
PWM控制器
这个寄存器用于配置一级分频值
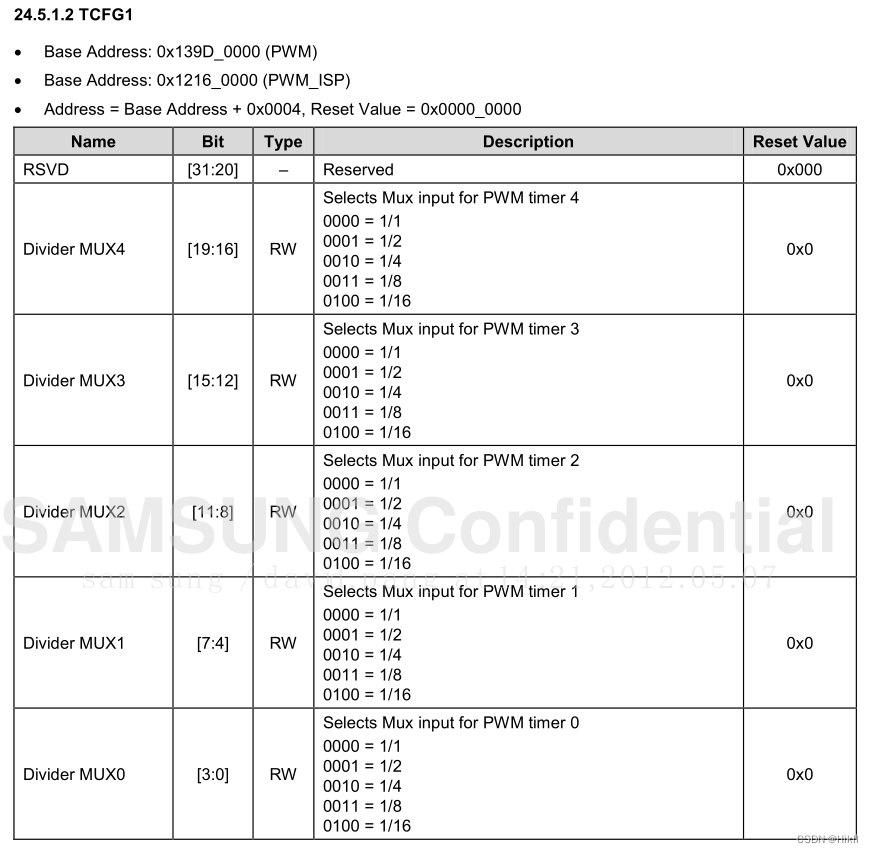
这个寄存器用于配置二级分频
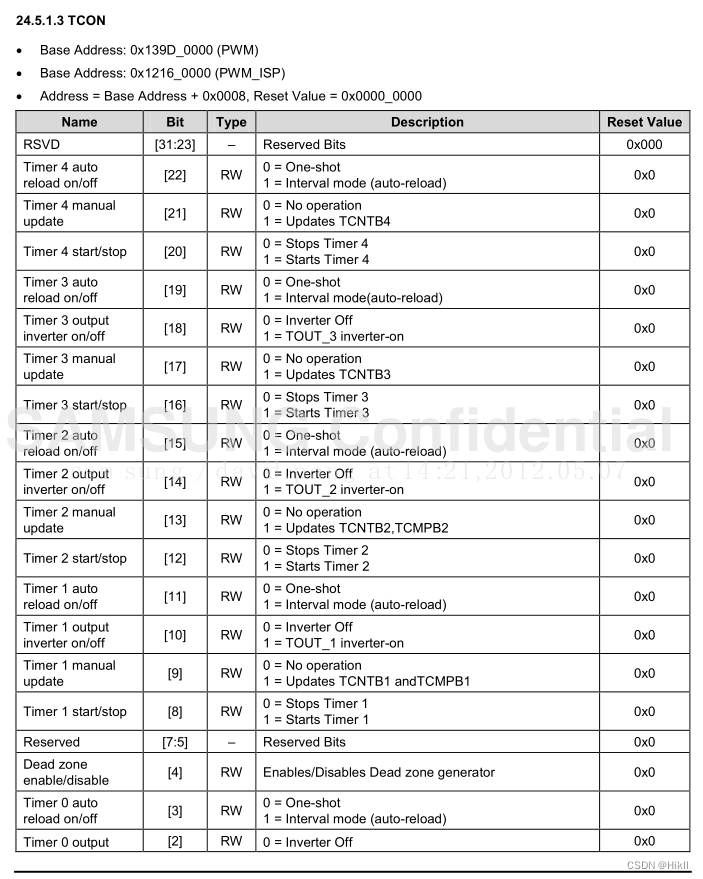
pwm控制寄存器
用于控制PWM的开始/停止
代码实现:
#include "exynos_4412.h"
void Delay(unsigned int Time)
{
while(Time --);
}
int main()
{
/*1.将GPD0_0引脚设置成PWM0的输出引脚*/
GPD0.CON = GPD0.CON & (~(0xF)) | (0x2);
/*2.设置PWM0的一级分频 一级分频倍数设置为100倍*/
PWM.TCFG0 = PWM.TCFG0 & (~(0xFF)) | 99;
/*2.设置PWM0的二级分频 二级分频倍数设置为1倍 递减计数器递减频率 = PLCK / (99 + 1) / 1 = 1M*/
PWM.TCFG1 = PWM.TCFG1 & (~(0xF));
/*4.设置PWM0为自动重装载,使其能够产生连续的脉冲信号*/
PWM.TCON = PWM.TCON | (1 << 3);
/*5.设置PWM0的频率为500HZ*/
PWM.TCNTB0 = 2000;
/*6.设置PWM0的占空比为50%*/
PWM.TCMPB0 = 1000;
/*7.将TCNTB0中的值手动装载到递减计数器*/
PWM.TCON = PWM.TCON | (1 << 1);
/*8.关闭手动更新*/
PWM.TCON = PWM.TCON & (~(1 << 1));
/*9.使能PWM0,递减计数器开始递减*/
PWM.TCON = PWM.TCON | 1;
while(1)
{
PWM.TCON = PWM.TCON | 1;
Delay(1000000);
PWM.TCON = PWM.TCON & (~(1));
Delay(1000000);
}
return 0;
}