过去半年以来基本精力都在测量机器人自动化监测领域,相对GNSS平台本身除了进行逻辑更新之外,算法层面基本没尽兴大的改动,目前NtripShare Cloud V3版本中支持三种解算方式,即动态、快速静态、静态。
1、动态---RTK算法,理论精度<10CM,输出频率高,可达1HZ(依赖于接收机数据上传频率)。
2、快速静态---基于RTK算法,对阶段累计RTK结果进行滤波(窗口、均值、中值),输出频率可达1HZ,精度值<2CM(依赖于RTK解算精度)。
3、静态---依赖于长时间观测结果,进行整体解算,最高输出频率30分,精度<5MM。
平台目前提供的三种算法在精度、响应时间可以提供不同选择,以下是天津附近河堤测站实测效果。


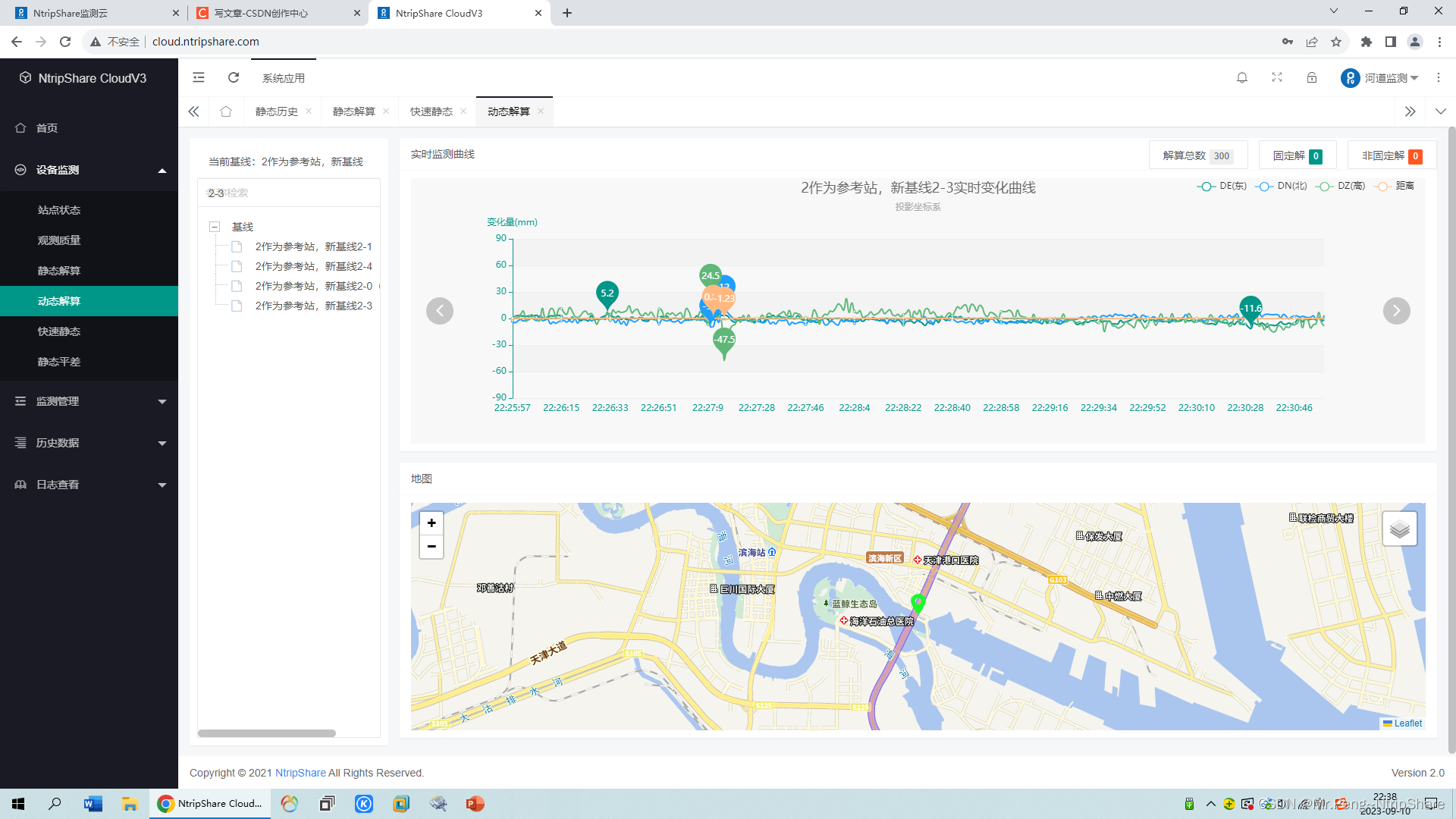
欢迎各各路朋友交流测试!某信:NtripShare










![[杂谈]-电动汽车有哪些不同类型](https://img-blog.csdnimg.cn/84c6a48a71d6439d85dd848281bf5fa9.png#pic_center)