qnx 平台中的camera hal 接口
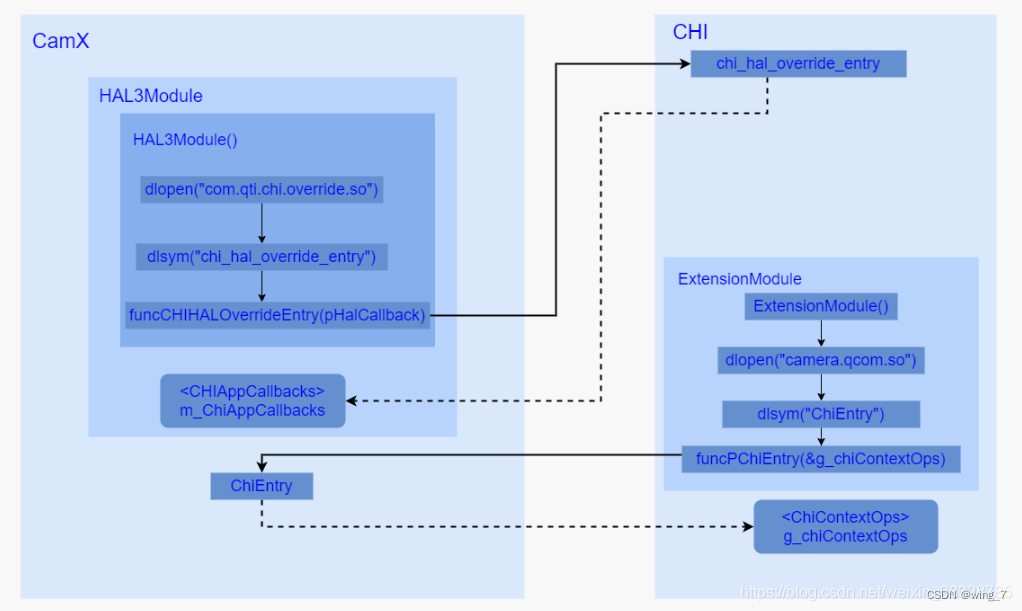
HAL3Module:chi_hal_override_entry
在android 的中使用Camx 打开com.qti.chi.override.so进行注册hal ops 操作接口
camhal3module.cpp 中的构造函数HAL3Module中
CHIHALOverrideEntry funcCHIHALOverrideEntry = reinterpret_cast<CHIHALOverrideEntry>( CamX::OsUtils::LibGetAddr(m_hChiOverrideModuleHandle, "chi_hal_override_entry"));
qnx 中的so 路径 ./camera_qcx/build/qnx/cdk_qcx/core/lib/aarch64/dll-le/com.qti.chi.override.so
/// @brief HAL Override entry
void chi_hal_override_entry(
chi_hal_callback_ops_t* callbacks)
{
ExtensionModule* pExtensionModule = ExtensionModule::GetInstance();
CHX_ASSERT(NULL != callbacks);
if (NULL != pExtensionModule)
{
callbacks->chi_get_num_cameras = chi_get_num_cameras;
callbacks->chi_get_camera_info = chi_get_camera_info;
callbacks->chi_get_info = chi_get_info;
callbacks->chi_initialize_override_session = chi_initialize_override_session;
callbacks->chi_finalize_override_session = chi_finalize_override_session;
callbacks->chi_override_process_request = chi_override_process_request;
callbacks->chi_teardown_override_session = chi_teardown_override_session;
callbacks->chi_extend_open = chi_extend_open;
callbacks->chi_extend_close = chi_extend_close;
callbacks->chi_remap_camera_id = chi_remap_camera_id;
callbacks->chi_modify_settings = chi_modify_settings;
callbacks->chi_get_default_request_settings = chi_get_default_request_settings;
callbacks->chi_override_flush = chi_override_flush;
callbacks->chi_override_signal_stream_flush = chi_override_signal_stream_flush;
callbacks->chi_override_dump = chi_override_dump;
callbacks->chi_get_physical_camera_info = chi_get_physical_camera_info;
callbacks->chi_is_stream_combination_supported = chi_is_stream_combination_supported;
callbacks->chi_is_concurrent_stream_combination_supported = chi_is_concurrent_stream_combination_supported;
#if CAMERA3_API_HIGH_PERF
callbacks->chi_override_start_recurrent_capture_requests = chi_override_start_recurrent_capture_requests;
callbacks->chi_override_stop_recurrent_capture_requests = chi_override_stop_recurrent_capture_requests;
callbacks->chi_override_set_settings = chi_override_set_settings;
callbacks->chi_override_activate_channel = chi_override_activate_channel;
#endif // CAMERA3_API_HIGH_PERF
}
}
CAMXHAL::Init
类似于android hardware\interfaces\camera\provider\2.4\default\cameraProvider.cpp 的函数CameraProvider::initialize 对camera 进行初始化操作获取注册注册的操作接口camera_common
最终获取的是chi_hal_override_entry注册接口
/**
* @brief
* Initialize CAMX HAL and CSL.
*
* @return
* Status as defined in CamStatus_e.
*/
CamStatus_e CAMXHAL::Init()
{
CamStatus_e rc = CAMERA_SUCCESS;
const hw_module_t* hw_module = NULL;
CAM_TRACE_LOG(STREAM_MGR, "CAMXHAL::Init");
int ret = hw_get_module(CAMERA_HARDWARE_MODULE_ID, &hw_module);
if (0 != ret)
{
QCX_LOG(STREAM_MGR, ERROR, "Camera module not found");
rc = CAMERA_EFAILED;
}
else
{
m_CameraModule = reinterpret_cast<const camera_module_t*>(hw_module);
m_CameraModule->get_vendor_tag_ops(&m_Vtags);
ret = m_CameraModule->init();
if (0 != ret)
{
QCX_LOG(STREAM_MGR, ERROR, "Camera module init failed");
rc = CAMERA_EFAILED;
}
else
{
ret = set_camera_metadata_vendor_ops(const_cast<vendor_tag_ops_t*>(&m_Vtags));
if (0 != ret)
{
QCX_LOG(STREAM_MGR, ERROR, "set vendor tag ops failed (ret = %d)", ret);
rc = CAMERA_EFAILED;
}
else
{
MetaData metaData(&m_Vtags);
const char sectionName[] = "org.quic.camera.qtimer";
const char tagName[] = "timestamp";
uint32_t tagId = 0;
rc = metaData.GetTagId(tagName, sectionName, &tagId);
if (CAMERA_SUCCESS != rc)
{
QCX_LOG(STREAM_MGR, ERROR, "GetTagId failed, tagName = %s (result = 0x%x)",
tagName, rc);
}
else
{
QCX_LOG(STREAM_MGR, DEBUG, "GetTagId successful, time stamp tagId = %u", tagId);
m_TimeStampTagId = tagId;
}
}
}
if (CAMERA_SUCCESS == rc)
{
m_NumOfCameras = m_CameraModule->get_number_of_cameras();
if (m_NumOfCameras < 0)
{
QCX_LOG(STREAM_MGR, ERROR, "No camera found");
rc = CAMERA_EFAILED;
}
else
{
QCX_LOG(STREAM_MGR, HIGH, "Camera module init success, no. of camera: %u",
m_NumOfCameras);
}
}
if (CAMERA_SUCCESS == rc)
{
rc = BuildCameraIdMap();
if (CAMERA_SUCCESS != rc)
{
QCX_LOG(STREAM_MGR, ERROR, "Populating logical camera Ids failed(result = 0x%x)",
rc);
}
else
{
QCX_LOG(STREAM_MGR, DEBUG, "Logical camera Ids obtained");
}
}
}
CAM_TRACE_LOG(STREAM_MGR, "CAMXHAL::Init : End");
return rc;
}
CAMXHAL::OpenCamera
调用的是 chi_extend_open函数进行camera的open
Android 中与之对应的是hardware\qcom\camera\qcamera2\QCamera2Factory.cpp
QCamera2Factory::cameraDeviceOpen
/**
* @brief
* Open camera corresponding Stream Session.
*
* @param pSession [in, out]
* pointer to Stream Session.
*
* @return
* Status as defined in CamStatus_e.
*/
CamStatus_e CAMXHAL::OpenCamera(StreamSession* pSession)
{
CamStatus_e rc = CAMERA_SUCCESS;
CamStatus_e rcMutex = CAMERA_SUCCESS;
rcMutex = OSAL_CriticalSectionEnter(m_CamxMutex);
CAM_TRACE_LOG(STREAM_MGR, "CAMXHAL::OpenCamera");
if (CAMERA_SUCCESS != rcMutex)
{
QCX_LOG(STREAM_MGR, ERROR, "Failed in OSAL_CriticalSectionEnter(rc=%u)", rcMutex);
rc = rcMutex;
}
else
{
hw_device_t* localDevice = nullptr;
uint32_t logicalId = 0xFFFFFFFFU;
for (uint32_t i = 0; i < pSession->m_NumInputs; i++)
{
if (m_CamIdMap.find(pSession->m_InputId[i]) == m_CamIdMap.end())
{
QCX_LOG(STREAM_MGR, ERROR, "Logical camera Id not found for physical CamId=%u",
pSession->m_InputId[i]);
rc = CAMERA_EBADPARAM;
break;
}
else
{
if (0xFFFFFFFFU == logicalId)
{
logicalId = m_CamIdMap[pSession->m_InputId[i]];
}
else
{
if (m_CamIdMap[pSession->m_InputId[i]] != logicalId)
{
QCX_LOG(STREAM_MGR, ERROR, "Logical camera Id %u for input Id %u is invalid",
logicalId, pSession->m_InputId[i]);
rc = CAMERA_EBADPARAM;
break;
}
}
}
}
if (CAMERA_SUCCESS == rc)
{
pSession->m_logicalCameraId = logicalId;
int ret = m_CameraModule->common.methods->open((const hw_module_t*)m_CameraModule,
std::to_string(logicalId).c_str(), &localDevice);
if ((0 != ret) || (nullptr == localDevice))
{
QCX_LOG(STREAM_MGR, ERROR, "Camera open failed for camera id: %u", logicalId);
rc = CAMERA_EFAILED;
}
else
{
QCX_LOG(STREAM_MGR, HIGH, "Camera opened for camera id: %u", logicalId);
camera3_device_t* camDevice = reinterpret_cast<camera3_device_t*>(localDevice);
m_CamDevices.insert(std::pair<uint32_t, camera3_device_t*>(logicalId, camDevice));
ret = camDevice->ops->initialize(camDevice, this);
if (0 != ret)
{
QCX_LOG(STREAM_MGR, ERROR, "Camera device initialize failed for"
"camera id: %u", logicalId);
rc = CAMERA_EFAILED;
}
else
{
QCX_LOG(STREAM_MGR, HIGH, "Camera device initialized for Camera Id: %u",
logicalId);
}
}
}
rcMutex = OSAL_CriticalSectionLeave(m_CamxMutex);
if (CAMERA_SUCCESS != rcMutex)
{
QCX_LOG(STREAM_MGR, ERROR, "Failed in OSAL_CriticalSectionLeave(rc=%u)",rcMutex);
if (CAMERA_SUCCESS == rc)
{
rc = rcMutex;
}
}
}
CAM_TRACE_LOG(STREAM_MGR, "CAMXHAL::OpenCamera : End");
return rc;
}
camDevice->ops->initialize=CamX::initialize 初始化
m_HALCallbacks.ProcessCaptureResult = ProcessCaptureResult
camx 找到在camera hal层的函数指针的映射关系。
映射到:vendor/qcom/proprietary/camx/src/core/hal/camxhal3entry.cpp 中的
static Dispatch g_dispatchHAL3(&g_jumpTableHAL3);:
定义了g_camera3DeviceOps变量:
static camera3_device_ops_t g_camera3DeviceOps =
{
CamX::initialize,
CamX::configure_streams,
NULL,
CamX::construct_default_request_settings,
CamX::process_capture_request,
NULL,
CamX::dump,
CamX::flush,
{0},
};camera.provider中如何实现到camera hal层的跳跃,camera service调用到camera provider中的接口方法,现在调用到 camera provider中的 hardware/interfaces/camera/device/3.2/default/CameraDeviceSession.cpp 中的processCaptureRequest(…)方法,最终会调用到
mDevice->ops->process_capture_request
initialize
该方法在调用open后紧接着被调用,主要用于将上层的回调接口传入HAL中,一旦有数据或者事件产生,CamX便会通过这些回调接口将数据或者事件上传至调用者,其内部的实现较为简单。
initialize方法中有两个参数,分别是之前通过open方法获取的camera3_device_t结构体和实现了camera3_callback_ops_t的CameraDevice,很显然camera3_device_t结构体并不是重点,所以该方法的主要工作是将camera3_callback_ops_t与CamX关联上,一旦数据准备完成便通过这里camera3_callback_ops_t中回调方法将数据回传到Camera Provider中的CameraDevice中,基本流程可以总结为以下几点:
1.实例化了一个Camera3CbOpsRedirect对象并将其加入了g_HAL3Entry.m_cbOpsList队列中,这样方便之后需要的时候能够顺利拿到该对象。
2.将本地的process_capture_result以及notify方法地址分别赋值给Camera3CbOpsRedirect.cbOps中的process_capture_result以及notify函数指针。
3.将上层传入的回调方法结构体指针pCamera3CbOpsAPI赋值给Camera3CbOpsRedirect.pCbOpsAPI,并将Camera3CbOpsRedirect.cbOps赋值给pCamera3CbOpsAPI,通过JumpTableHal3的initialize方法将pCamera3CbOpsAPI传给HALDevice中的m_pCamera3CbOps成员变量,这样HALDevice中的m_pCamera3CbOps就指向了CamX中本地方法process_capture_result以及notify。
经过这样的一番操作之后,一旦CHI有数据传入便会首先进入到本地方法ProcessCaptureResult,然后在该方法中获取到HALDevice的成员变量m_pCamera3CbOps,进而调用m_pCamera3CbOps中的process_capture_result方法,即camxhal3entry.cpp中定义的process_capture_result方法,然后这个方法中会去调用JumpTableHAL3.process_capture_result方法,该方法最终会去调用Camera3CbOpsRedirect.pCbOpsAPI中的process_capture_result方法,这样就调到从Provider传入的回调方法,将数据顺利给到了CameraCaptureSession中。
配置相机设备数据流
在打开相机应用过程中,App在获取并打开相机设备之后,会调用CameraDevice.createCaptureSession来获取CameraDeviceSession,并且通过Camera api v2标准接口,通知Camera Service,调用其CameraDeviceClient.endConfigure方法,在该方法内部又会去通过HIDL接口ICameraDeviceSession::configureStreams_3_4通知Provider开始处理此次配置需求,在Provider内部,会去通过在调用open流程中获取的camera3_device_t结构体的configure_streams方法来将数据流的配置传入CamX-CHI中,之后由CamX-CHI完成对数据流的配置工作,接下来我们来详细分析下CamX-CHI对于该标准HAL3接口 configure_streams的具体实现:
高通Camera驱动(3)-- configure_streams_高通camx configurestreams_Cam_韦的博客-CSDN博客
vendor/qcom/proprietary/camx/src/core/hal/camxhaldevice.cpp
CamxResult HALDevice::ConfigureStreams(
Camera3StreamConfig* pStreamConfigs)
{
CamxResult result = CamxResultSuccess;
// Validate the incoming stream configurations
result = CheckValidStreamConfig(pStreamConfigs);
if ((StreamConfigModeConstrainedHighSpeed == pStreamConfigs->operationMode) ||
(StreamConfigModeSuperSlowMotionFRC == pStreamConfigs->operationMode))
{
SearchNumBatchedFrames (pStreamConfigs, &m_usecaseNumBatchedFrames, &m_FPSValue);
CAMX_ASSERT(m_usecaseNumBatchedFrames > 1);
}
else
{
// Not a HFR usecase batch frames value need to set to 1.
m_usecaseNumBatchedFrames = 1;
}
if (CamxResultSuccess == result)
{
ClearFrameworkRequestBuffer();
m_numPipelines = 0;
if (TRUE == m_bCHIModuleInitialized)
{
GetCHIAppCallbacks()->chi_teardown_override_session(reinterpret_cast<camera3_device*>(&m_camera3Device), 0, NULL);
}
m_bCHIModuleInitialized = CHIModuleInitialize(pStreamConfigs);
if (FALSE == m_bCHIModuleInitialized)
{
CAMX_LOG_ERROR(CamxLogGroupHAL, "CHI Module failed to configure streams");
result = CamxResultEFailed;
}
else
{
CAMX_LOG_VERBOSE(CamxLogGroupHAL, "CHI Module configured streams ... CHI is in control!");
}
}
return result;
}
1)如果之前有过配流的操作,m_bCHIModuleInitialized会被赋值,然后销毁 session的操作
2)同文件下调用CHIModuleInitialize函数操作,然后m_bCHIModuleInitialized赋值
BOOL HALDevice::CHIModuleInitialize(
Camera3StreamConfig* pStreamConfigs)
{
BOOL isOverrideEnabled = FALSE;
if (TRUE == HAL3Module::GetInstance()->IsCHIOverrideModulePresent())
{
/// @todo (CAMX-1518) Handle private data from Override module
VOID* pPrivateData;
chi_hal_callback_ops_t* pCHIAppCallbacks = GetCHIAppCallbacks();
pCHIAppCallbacks->chi_initialize_override_session(GetCameraId(),
reinterpret_cast<const camera3_device_t*>(&m_camera3Device),
&m_HALCallbacks,
reinterpret_cast<camera3_stream_configuration_t*>(pStreamConfigs),
&isOverrideEnabled,
&pPrivateData);
}
return isOverrideEnabled;
}
vendor/qcom/proprietary/chi-cdk/vendor/chioverride/default/chxextensioninterface.cpp
static CDKResult chi_initialize_override_session(
uint32_t cameraId,
const camera3_device_t* camera3_device,
const chi_hal_ops_t* chiHalOps,
camera3_stream_configuration_t* stream_config,
int* override_config,
void** priv)
{
ExtensionModule* pExtensionModule = ExtensionModule::GetInstance();
pExtensionModule->InitializeOverrideSession(cameraId, camera3_device, chiHalOps, stream_config, override_config, priv);
return CDKResultSuccess;
}
vendor/qcom/proprietary/chi-cdk/vendor/chioverride/default/chxextensionmodule.cpp
CDKResult ExtensionModule::InitializeOverrideSession(
uint32_t logicalCameraId,
const camera3_device_t* pCamera3Device,
const chi_hal_ops_t* chiHalOps,
camera3_stream_configuration_t* pStreamConfig,
int* pIsOverrideEnabled,
VOID** pPrivate)
{
CDKResult result = CDKResultSuccess;
UINT32 modeCount = 0;
ChiSensorModeInfo* pAllModes = NULL;
UINT32 fps = *m_pDefaultMaxFPS;
BOOL isVideoMode = FALSE;
uint32_t operation_mode;
static BOOL fovcModeCheck = EnableFOVCUseCase();
UsecaseId selectedUsecaseId = UsecaseId::NoMatch;
UINT minSessionFps = 0;
UINT maxSessionFps = 0;
*pPrivate = NULL;
*pIsOverrideEnabled = FALSE;
m_aFlushInProgress = FALSE;
m_firstResult = FALSE;
m_hasFlushOccurred = FALSE;
if (NULL == m_hCHIContext)
{
m_hCHIContext = g_chiContextOps.pOpenContext();
}
ChiVendorTagsOps vendorTagOps = { 0 };
g_chiContextOps.pTagOps(&vendorTagOps);
operation_mode = pStreamConfig->operation_mode >> 16;
operation_mode = operation_mode & 0x000F;
pStreamConfig->operation_mode = pStreamConfig->operation_mode & 0xFFFF;
for (UINT32 stream = 0; stream < pStreamConfig->num_streams; stream++)
{
if (0 != (pStreamConfig->streams[stream]->usage & GrallocUsageHwVideoEncoder))
{
isVideoMode = TRUE;
break;
}
}
if ((isVideoMode == TRUE) && (operation_mode != 0))
{
UINT32 numSensorModes = m_logicalCameraInfo[logicalCameraId].m_cameraCaps.numSensorModes;
CHISENSORMODEINFO* pAllSensorModes = m_logicalCameraInfo[logicalCameraId].pSensorModeInfo;
if ((operation_mode - 1) >= numSensorModes)
{
result = CDKResultEOverflow;
CHX_LOG_ERROR("operation_mode: %d, numSensorModes: %d", operation_mode, numSensorModes);
}
else
{
fps = pAllSensorModes[operation_mode - 1].frameRate;
}
}
m_pResourcesUsedLock->Lock();
if (m_totalResourceBudget > CostOfAnyCurrentlyOpenLogicalCameras())
{
UINT32 myLogicalCamCost = CostOfLogicalCamera(logicalCameraId, pStreamConfig);
if (myLogicalCamCost > (m_totalResourceBudget - CostOfAnyCurrentlyOpenLogicalCameras()))
{
CHX_LOG_ERROR("Insufficient HW resources! myLogicalCamCost = %d, remaining cost = %d",
myLogicalCamCost, (m_totalResourceBudget - CostOfAnyCurrentlyOpenLogicalCameras()));
result = CamxResultEResource;
}
else
{
m_IFEResourceCost[logicalCameraId] = myLogicalCamCost;
m_resourcesUsed += myLogicalCamCost;
}
}
else
{
CHX_LOG_ERROR("Insufficient HW resources! TotalResourceCost = %d, CostOfAnyCurrentlyOpencamera = %d",
m_totalResourceBudget, CostOfAnyCurrentlyOpenLogicalCameras());
result = CamxResultEResource;
}
m_pResourcesUsedLock->Unlock();
if (CDKResultSuccess == result)
{
#if defined(CAMX_ANDROID_API) && (CAMX_ANDROID_API >= 28) //Android-P or better
camera_metadata_t *metadata = const_cast<camera_metadata_t*>(pStreamConfig->session_parameters);
camera_metadata_entry_t entry = { 0 };
entry.tag = ANDROID_CONTROL_AE_TARGET_FPS_RANGE;
// The client may choose to send NULL sesssion parameter, which is fine. For example, torch mode
// will have NULL session param.
if (metadata != NULL)
{
int ret = find_camera_metadata_entry(metadata, entry.tag, &entry);
if(ret == 0) {
minSessionFps = entry.data.i32[0];
maxSessionFps = entry.data.i32[1];
m_usecaseMaxFPS = maxSessionFps;
}
}
#endif
CHIHANDLE staticMetaDataHandle = const_cast<camera_metadata_t*>(
m_logicalCameraInfo[logicalCameraId].m_cameraInfo.static_camera_characteristics);
UINT32 metaTagPreviewFPS = 0;
UINT32 metaTagVideoFPS = 0;
CHITAGSOPS vendorTagOps;
m_previewFPS = 0;
m_videoFPS = 0;
GetInstance()->GetVendorTagOps(&vendorTagOps);
result = vendorTagOps.pQueryVendorTagLocation("org.quic.camera2.streamBasedFPS.info", "PreviewFPS",
&metaTagPreviewFPS);
if (CDKResultSuccess == result)
{
vendorTagOps.pGetMetaData(staticMetaDataHandle, metaTagPreviewFPS, &m_previewFPS,
sizeof(m_previewFPS));
}
result = vendorTagOps.pQueryVendorTagLocation("org.quic.camera2.streamBasedFPS.info", "VideoFPS", &metaTagVideoFPS);
if (CDKResultSuccess == result)
{
vendorTagOps.pGetMetaData(staticMetaDataHandle, metaTagVideoFPS, &m_videoFPS,
sizeof(m_videoFPS));
}
if ((StreamConfigModeConstrainedHighSpeed == pStreamConfig->operation_mode) ||
(StreamConfigModeSuperSlowMotionFRC == pStreamConfig->operation_mode))
{
SearchNumBatchedFrames(logicalCameraId, pStreamConfig,
&m_usecaseNumBatchedFrames, &m_usecaseMaxFPS, maxSessionFps);
if (480 > m_usecaseMaxFPS)
{
m_CurrentpowerHint = PERF_LOCK_POWER_HINT_VIDEO_ENCODE_HFR;
}
else
{
// For 480FPS or higher, require more aggresive power hint
m_CurrentpowerHint = PERF_LOCK_POWER_HINT_VIDEO_ENCODE_HFR_480FPS;
}
}
else
{
// Not a HFR usecase, batch frames value need to be set to 1.
m_usecaseNumBatchedFrames = 1;
if (maxSessionFps == 0)
{
m_usecaseMaxFPS = fps;
}
if (TRUE == isVideoMode)
{
if (30 >= m_usecaseMaxFPS)
{
m_CurrentpowerHint = PERF_LOCK_POWER_HINT_VIDEO_ENCODE;
}
else
{
m_CurrentpowerHint = PERF_LOCK_POWER_HINT_VIDEO_ENCODE_60FPS;
}
}
else
{
m_CurrentpowerHint = PERF_LOCK_POWER_HINT_PREVIEW;
}
}
if ((NULL != m_pPerfLockManager[logicalCameraId]) && (m_CurrentpowerHint != m_previousPowerHint))
{
m_pPerfLockManager[logicalCameraId]->ReleasePerfLock(m_previousPowerHint);
}
// Example [B == batch]: (240 FPS / 4 FPB = 60 BPS) / 30 FPS (Stats frequency goal) = 2 BPF i.e. skip every other stats
*m_pStatsSkipPattern = m_usecaseMaxFPS / m_usecaseNumBatchedFrames / 30;
if (*m_pStatsSkipPattern < 1)
{
*m_pStatsSkipPattern = 1;
}
m_VideoHDRMode = (StreamConfigModeVideoHdr == pStreamConfig->operation_mode);
m_torchWidgetUsecase = (StreamConfigModeQTITorchWidget == pStreamConfig->operation_mode);
// this check is introduced to avoid set *m_pEnableFOVC == 1 if fovcEnable is disabled in
// overridesettings & fovc bit is set in operation mode.
// as well as to avoid set,when we switch Usecases.
if (TRUE == fovcModeCheck)
{
*m_pEnableFOVC = ((pStreamConfig->operation_mode & StreamConfigModeQTIFOVC) == StreamConfigModeQTIFOVC) ? 1 : 0;
}
SetHALOps(chiHalOps, logicalCameraId);
m_logicalCameraInfo[logicalCameraId].m_pCamera3Device = pCamera3Device;
selectedUsecaseId = m_pUsecaseSelector->GetMatchingUsecase(&m_logicalCameraInfo[logicalCameraId],
pStreamConfig);
CHX_LOG_CONFIG("Session_parameters FPS range %d:%d, previewFPS %d, videoFPS %d,"
"BatchSize: %u FPS: %u SkipPattern: %u,"
"cameraId = %d selected use case = %d",
minSessionFps,
maxSessionFps,
m_previewFPS,
m_videoFPS,
m_usecaseNumBatchedFrames,
m_usecaseMaxFPS,
*m_pStatsSkipPattern,
logicalCameraId,
selectedUsecaseId);
// FastShutter mode supported only in ZSL usecase.
if ((pStreamConfig->operation_mode == StreamConfigModeFastShutter) &&
(UsecaseId::PreviewZSL != selectedUsecaseId))
{
pStreamConfig->operation_mode = StreamConfigModeNormal;
}
m_operationMode[logicalCameraId] = pStreamConfig->operation_mode;
}
if (UsecaseId::NoMatch != selectedUsecaseId)
{
m_pSelectedUsecase[logicalCameraId] =
m_pUsecaseFactory->CreateUsecaseObject(&m_logicalCameraInfo[logicalCameraId],
selectedUsecaseId, pStreamConfig);
if (NULL != m_pSelectedUsecase[logicalCameraId])
{
m_pStreamConfig[logicalCameraId] = static_cast<camera3_stream_configuration_t*>(
CHX_CALLOC(sizeof(camera3_stream_configuration_t)));
m_pStreamConfig[logicalCameraId]->streams = static_cast<camera3_stream_t**>(
CHX_CALLOC(sizeof(camera3_stream_t*) * pStreamConfig->num_streams));
m_pStreamConfig[logicalCameraId]->num_streams = pStreamConfig->num_streams;
for (UINT32 i = 0; i< m_pStreamConfig[logicalCameraId]->num_streams; i++)
{
m_pStreamConfig[logicalCameraId]->streams[i] = pStreamConfig->streams[i];
}
m_pStreamConfig[logicalCameraId]->operation_mode = pStreamConfig->operation_mode;
// use camera device / used for recovery only for regular session
m_SelectedUsecaseId[logicalCameraId] = (UINT32)selectedUsecaseId;
CHX_LOG_CONFIG("Logical cam Id = %d usecase addr = %p", logicalCameraId, m_pSelectedUsecase[
logicalCameraId]);
m_pCameraDeviceInfo[logicalCameraId].m_pCamera3Device = pCamera3Device;
*pIsOverrideEnabled = TRUE;
}
else
{
CHX_LOG_ERROR("For cameraId = %d CreateUsecaseObject failed", logicalCameraId);
m_logicalCameraInfo[logicalCameraId].m_pCamera3Device = NULL;
m_pResourcesUsedLock->Lock();
// Reset the m_resourcesUsed & m_IFEResourceCost if usecase creation failed
if (m_resourcesUsed >= m_IFEResourceCost[logicalCameraId]) // to avoid underflow
{
m_resourcesUsed -= m_IFEResourceCost[logicalCameraId]; // reduce the total cost
m_IFEResourceCost[logicalCameraId] = 0;
}
m_pResourcesUsedLock->Unlock();
}
}
return result;
}
(1) 判断是否是视频模式,做帧率的操作
(2) 获取camera资源消耗情况,并对相关参数赋值
(3)根据logicalCameraId 匹配 usecase
(4)根据usecaseId 创建usecase
vendor/qcom/proprietary/chi-cdk/vendor/chioverride/default/chxutils.cpp
UsecaseId UsecaseSelector::GetMatchingUsecase(
const LogicalCameraInfo* pCamInfo,
camera3_stream_configuration_t* pStreamConfig)
{
UsecaseId usecaseId = UsecaseId::Default;
UINT32 VRDCEnable = ExtensionModule::GetInstance()->GetDCVRMode();
if ((pStreamConfig->num_streams == 2) && IsQuadCFASensor(pCamInfo) &&
(LogicalCameraType_Default == pCamInfo->logicalCameraType))
{
// need to validate preview size <= binning size, otherwise return error
/// If snapshot size is less than sensor binning size, select defaut zsl usecase.
/// Only if snapshot size is larger than sensor binning size, select QuadCFA usecase.
/// Which means for snapshot in QuadCFA usecase,
/// - either do upscale from sensor binning size,
/// - or change sensor mode to full size quadra mode.
if (TRUE == QuadCFAMatchingUsecase(pCamInfo, pStreamConfig))
{
usecaseId = UsecaseId::QuadCFA;
CHX_LOG_CONFIG("Quad CFA usecase selected");
return usecaseId;
}
}
if (pStreamConfig->operation_mode == StreamConfigModeSuperSlowMotionFRC)
{
usecaseId = UsecaseId::SuperSlowMotionFRC;
CHX_LOG_CONFIG("SuperSlowMotionFRC usecase selected");
return usecaseId;
}
/// Reset the usecase flags
VideoEISV2Usecase = 0;
VideoEISV3Usecase = 0;
GPURotationUsecase = FALSE;
GPUDownscaleUsecase = FALSE;
if ((NULL != pCamInfo) && (pCamInfo->numPhysicalCameras > 1) && VRDCEnable)
{
CHX_LOG_CONFIG("MultiCameraVR usecase selected");
usecaseId = UsecaseId::MultiCameraVR;
}
else if ((NULL != pCamInfo) && (pCamInfo->numPhysicalCameras > 1) && (pStreamConfig->num_streams > 1))
{
CHX_LOG_CONFIG("MultiCamera usecase selected");
usecaseId = UsecaseId::MultiCamera;
}
else
{
switch (pStreamConfig->num_streams)
{
case 2:
if (TRUE == IsRawJPEGStreamConfig(pStreamConfig))
{
CHX_LOG_CONFIG("Raw + JPEG usecase selected");
usecaseId = UsecaseId::RawJPEG;
break;
}
/// @todo Enable ZSL by setting overrideDisableZSL to FALSE
if (FALSE == m_pExtModule->DisableZSL())
{
if (TRUE == IsPreviewZSLStreamConfig(pStreamConfig))
{
usecaseId = UsecaseId::PreviewZSL;
CHX_LOG_CONFIG("ZSL usecase selected");
}
}
if(TRUE == m_pExtModule->UseGPURotationUsecase())
{
CHX_LOG_CONFIG("GPU Rotation usecase flag set");
GPURotationUsecase = TRUE;
}
if (TRUE == m_pExtModule->UseGPUDownscaleUsecase())
{
CHX_LOG_CONFIG("GPU Downscale usecase flag set");
GPUDownscaleUsecase = TRUE;
}
if (TRUE == m_pExtModule->EnableMFNRUsecase())
{
if (TRUE == MFNRMatchingUsecase(pStreamConfig))
{
usecaseId = UsecaseId::MFNR;
CHX_LOG_CONFIG("MFNR usecase selected");
}
}
if (TRUE == m_pExtModule->EnableHFRNo3AUsecas())
{
CHX_LOG_CONFIG("HFR without 3A usecase flag set");
HFRNo3AUsecase = TRUE;
}
break;
case 3:
VideoEISV2Usecase = m_pExtModule->EnableEISV2Usecase();
VideoEISV3Usecase = m_pExtModule->EnableEISV3Usecase();
if(TRUE == IsRawJPEGStreamConfig(pStreamConfig))
{
CHX_LOG_CONFIG("Raw + JPEG usecase selected");
usecaseId = UsecaseId::RawJPEG;
}
else if((FALSE == IsVideoEISV2Enabled(pStreamConfig)) && (FALSE == IsVideoEISV3Enabled(pStreamConfig)) &&
(TRUE == IsVideoLiveShotConfig(pStreamConfig)))
{
CHX_LOG_CONFIG("Video With Liveshot, ZSL usecase selected");
usecaseId = UsecaseId::VideoLiveShot;
}
break;
case 4:
if(TRUE == IsYUVInBlobOutConfig(pStreamConfig))
{
CHX_LOG_CONFIG("YUV callback and Blob");
usecaseId = UsecaseId::YUVInBlobOut;
}
break;
default:
CHX_LOG_CONFIG("Default usecase selected");
break;
}
}
if (TRUE == ExtensionModule::GetInstance()->IsTorchWidgetUsecase())
{
CHX_LOG_CONFIG("Torch widget usecase selected");
usecaseId = UsecaseId::Torch;
}
CHX_LOG_INFO("usecase ID:%d",usecaseId);
return usecaseId;
}(1)匹配usecase:根据 stream_number、operation_mode、numPhysicalCameras来判断选择哪个usecaseId
vendor/qcom/proprietary/chi-cdk/vendor/chioverride/default/chxusecaseutils.cpp
Usecase* UsecaseFactory::CreateUsecaseObject(
LogicalCameraInfo* pLogicalCameraInfo, ///< camera info
UsecaseId usecaseId, ///< Usecase Id
camera3_stream_configuration_t* pStreamConfig) ///< Stream config
{
Usecase* pUsecase = NULL;
UINT camera0Id = pLogicalCameraInfo->ppDeviceInfo[0]->cameraId;
switch (usecaseId)
{
case UsecaseId::PreviewZSL:
case UsecaseId::VideoLiveShot:
pUsecase = AdvancedCameraUsecase::Create(pLogicalCameraInfo, pStreamConfig, usecaseId);
break;
case UsecaseId::MultiCamera:
{
#if defined(CAMX_ANDROID_API) && (CAMX_ANDROID_API >= 28) //Android-P or better
LogicalCameraType logicalCameraType = m_pExtModule->GetCameraType(pLogicalCameraInfo->cameraId);
if (LogicalCameraType_DualApp == logicalCameraType)
{
pUsecase = UsecaseDualCamera::Create(pLogicalCameraInfo, pStreamConfig);
}
else
#endif
{
pUsecase = UsecaseMultiCamera::Create(pLogicalCameraInfo, pStreamConfig);
}
break;
}
case UsecaseId::MultiCameraVR:
//pUsecase = UsecaseMultiVRCamera::Create(pLogicalCameraInfo, pStreamConfig);
break;
case UsecaseId::QuadCFA:
if (TRUE == ExtensionModule::GetInstance()->UseFeatureForQuadCFA())
{
pUsecase = AdvancedCameraUsecase::Create(pLogicalCameraInfo, pStreamConfig, usecaseId);
}
else
{
pUsecase = UsecaseQuadCFA::Create(pLogicalCameraInfo, pStreamConfig);
}
break;
case UsecaseId::Torch:
pUsecase = UsecaseTorch::Create(camera0Id, pStreamConfig);
break;
#if (!defined(LE_CAMERA)) // SuperSlowMotion not supported in LE
case UsecaseId::SuperSlowMotionFRC:
pUsecase = UsecaseSuperSlowMotionFRC::Create(pLogicalCameraInfo, pStreamConfig);
break;
#endif
default:
pUsecase = AdvancedCameraUsecase::Create(pLogicalCameraInfo, pStreamConfig, usecaseId);
break;
}
return pUsecase;
}
(1)创建usecase:根据usecaseId选择,创建不同的usecase(AdvancedCameraUsecase : ZSL、VideoLiveShot
UsecaseDualCamera:双摄
UsecaseMultiCamera:多摄
UsecaseQuadCFA:四合一、九合一处理
UsecaseTorch:闪光灯模式
UsecaseSuperSlowMotionFRC:慢动作
qnx UsecaseFactory::CreateUsecaseObject
apps/qnx_ap/AMSS/multimedia/qcamera/camera_qcx/cdk_qcx/core/chiusecase/chxusecaseutils.cpp
// UsecaseFactory::CreateUsecaseObject
VOID* UsecaseFactory::CreateUsecaseObject(
LogicalCameraInfo* pLogicalCameraInfo, ///< camera info
UsecaseId usecaseId, ///< Usecase Id
camera3_stream_configuration_t* pStreamConfig, ///< Stream config
ChiMcxConfigHandle hDescriptorConfig) ///< mcx config
{
Usecase* pUsecase = NULL;
UsecaseXR* pUsecaseXR = NULL;
UsecaseAuto* pUsecaseAuto = NULL;
VOID* pReturnUsecase = NULL;
switch (usecaseId)
{
case UsecaseId::MultiCameraVR:
//pUsecase = UsecaseMultiVRCamera::Create(pLogicalCameraInfo, pStreamConfig);
break;
#ifndef __QNXNTO__
case UsecaseId::Torch:
pUsecase = UsecaseTorch::Create(pLogicalCameraInfo, pStreamConfig);
break;
case UsecaseId::AON:
pUsecase = CHXUsecaseAON::Create(pLogicalCameraInfo);
break;
#endif // !defined(QNXNTO)
#if CAMERA3_API_HIGH_PERF
#ifndef __QNXNTO__
case UsecaseId::XR:
pUsecaseXR = UsecaseXR::Create(pLogicalCameraInfo, pStreamConfig);
break;
#endif // !defined(QNXNTO)
case UsecaseId::Auto:
pUsecaseAuto = UsecaseAuto::Create(pLogicalCameraInfo, pStreamConfig);
break;
default:
break;
#else
case UsecaseId::PreviewZSL:
#ifndef __QNXNTO__
case UsecaseId::VideoLiveShot:
pUsecase = AdvancedCameraUsecase::Create(pLogicalCameraInfo, pStreamConfig, usecaseId);
break;
#if !defined(LE_CAMERA) && !defined(__QNXNTO__)
case UsecaseId::MultiCamera:
if ((LogicalCameraType::LogicalCameraType_Default == pLogicalCameraInfo->logicalCameraType) &&
(pLogicalCameraInfo->numPhysicalCameras > 1))
{
pUsecase = ChiMulticameraBase::Create(pLogicalCameraInfo, pStreamConfig, hDescriptorConfig);
}
break;
#endif // !defined(LE_CAMERA)
case UsecaseId::QuadCFA:
pUsecase = AdvancedCameraUsecase::Create(pLogicalCameraInfo, pStreamConfig, usecaseId);
break;
case UsecaseId::Depth:
pUsecase = AdvancedCameraUsecase::Create(pLogicalCameraInfo, pStreamConfig, usecaseId);
break;
#endif // !defined(QNXNTO)
#if CAMERA3_API_HIGH_PERF
case UsecaseId::Auto:
pUsecaseAuto = UsecaseAuto::Create(pLogicalCameraInfo, pStreamConfig);
break;
#endif // CAMERA3_API_HIGH_PERF
default:
#ifndef __QNXNTO__
pUsecase = AdvancedCameraUsecase::Create(pLogicalCameraInfo, pStreamConfig, usecaseId);
#endif
break;
#endif // CAMERA3_API_HIGH_PERF
}
#if CAMERA3_API_HIGH_PERF
if (UsecaseId::XR == usecaseId)
{
pReturnUsecase = reinterpret_cast<VOID*>(pUsecaseXR);
}
if (UsecaseId::Auto == usecaseId)
{
pReturnUsecase = reinterpret_cast<VOID*>(pUsecaseAuto);
}
#else
pReturnUsecase = reinterpret_cast<VOID*>(pUsecase);
#endif // CAMERA3_API_HIGH_PERF
return pReturnUsecase;
}
配置数据流是整个CamX-CHI流程比较重要的一环,其中主要包括两个阶段:
1.选择UsecaseId
2.根据选择的UsecaseId创建Usecase
Camx 基本组件及其结构关系_yaoming168的博客-CSDN博客
Camera camx代码结构、编译、代码流程简介_camx 编译-CSDN博客
Camera 初始化(Open)二(HAL3中Open过程)_cameramodule::open_zhuyong006的博客-CSDN博客