目录
1. 红外壁障模块分析编辑
2. 跟随小车的原理
3. 跟随小车开发和调试代码
4. 超声波模块介绍
5. 摇头测距小车开发和调试代码
1. 红外壁障模块分析
原理和循迹是一样的,循迹红外观朝下,跟随朝前
- TCRT5000传感器的红外发射二极管不断发射红外线
- 当发射出的红外线没有被反射回来或被反射回来但强度不够大时
- 红外接收管一直处于关断状态,此时模块的输出端为高电平,指示二极管一直处于熄灭状态
- 被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和
- 此时模块的输出端为低电平,指示二极管被点亮
- 总结就是一句话,没反射回来,D0输出高电平,灭灯
2. 跟随小车的原理
- 左边跟随模块能返回红外,输出低电平,右边不能返回,输出高电平,说明物体在左边,需要左转
- 右边跟随模块能返回红外,输出低电平,左边不能返回,输出高电平,说明物体在右边,需要右转
3. 跟随小车开发和调试代码
//main.c
#include "motor.h"
#include "delay.h"
#include "reg52.h"
//sbit leftSensor = P2^7;
//sbit rightSensor = P2^6;
sbit leftSensor = P2^5;
sbit rightSensor = P2^4;
void main()
{
while(1){
if(leftSensor == 0 && rightSensor == 0){
goForward();
}
if(leftSensor == 1 && rightSensor == 0){
goRight();
}
if(leftSensor == 0 && rightSensor == 1){
goLeft();
}
if(leftSensor == 1 && rightSensor == 1){
//停
stop();
}
}
}
//motor.c
#include "reg52.h"
sbit RightCon1A = P3^2;
sbit RightCon1B = P3^3;
sbit LeftCon1A = P3^4;
sbit LeftCon1B = P3^5;
void goForward()
{
LeftCon1A = 0;
LeftCon1B = 1;
RightCon1A = 0;
RightCon1B = 1;
}
void goRight()
{
LeftCon1A = 0;
LeftCon1B = 1;
RightCon1A = 0;
RightCon1B = 0;
}
void goLeft()
{
LeftCon1A = 0;
LeftCon1B = 0;
RightCon1A = 0;
RightCon1B = 1;
}
void goBack()
{
LeftCon1A = 1;
LeftCon1B = 0;
RightCon1A = 1;
RightCon1B = 0;
}
void stop()
{
LeftCon1A = 0;
LeftCon1B = 0;
RightCon1A = 0;
RightCon1B = 0;
}
//delay.c
#include "intrins.h"
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
4. 超声波模块介绍
使用超声波模块,型号:HC-SR04

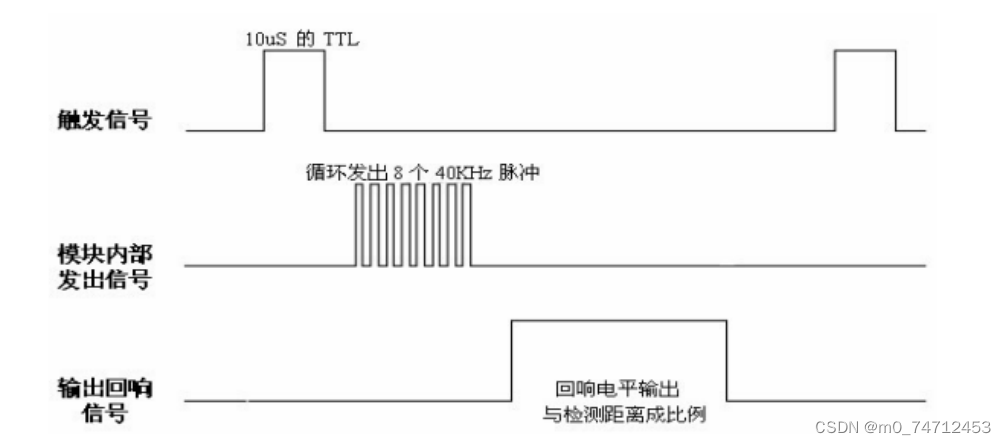
- 怎么让它发送波 Trig ,给Trig端口至少10us的高电平
- 怎么知道它开始发了 Echo信号,由低电平跳转到高电平,表示开始发送波
- 怎么知道接收了返回波 Echo,由高电平跳转回低电平,表示波回来了
- 怎么算时间 Echo引脚维持高电平的时间! 波发出去的那一下,开始启动定时器 波回来的拿一下,我们开始停止定时器,计算出中间经过多少时间
- 怎么算距离 距离 = 速度 (340m/s)* 时间/2
时序图:
5. 摇头测距小车开发和调试代码
//main.c
#include "reg52.h"
#include "hc04.h"
#include "delay.h"
#include "sg90.h"
#include "motor.h"
#define MIDDLE 0
#define LEFT 1
#define RIGHT 2
void main()
{
char dir;
double disMiddle;
double disLeft;
double disRight;
Time0Init();
Time1Init();
//舵机的初始位置
sgMiddle();
Delay300ms();
Delay300ms();
dir = MIDDLE;
while(1){
if(dir != MIDDLE){
sgMiddle();
dir = MIDDLE;
Delay300ms();
}
disMiddle = get_distance();
if(disMiddle > 35){
//前进
goForward();
}else if(disMiddle < 10){
goBack();
}else
{
//停止
stop();
//测左边距离
sgLeft();
Delay300ms();
disLeft = get_distance();
sgMiddle();
Delay300ms();
sgRight();
dir = RIGHT;
Delay300ms();
disRight = get_distance();
if(disLeft < disRight){
goRight();
Delay150ms();
stop();
}
if(disRight < disLeft){
goLeft();
Delay150ms();
stop();
}
}
}
}
//hc04.c
#include "reg52.h"
#include "delay.h"
sbit Trig = P2^3;
sbit Echo = P2^2;
void Time1Init()
{
TMOD &= 0x0F; //设置定时器模式
TMOD |= 0x10;
TH1 = 0;
TL1 = 0;
//设置定时器0工作模式1,初始值设定0开始数数,不着急启动定时器
}
void startHC()
{
Trig = 0;
Trig = 1;
Delay10us();
Trig = 0;
}
double get_distance()
{
double time;
//定时器数据清零,以便下一次测距
TH1 = 0;
TL1 = 0;
//1. Trig ,给Trig端口至少10us的高电平
startHC();
//2. echo由低电平跳转到高电平,表示开始发送波
while(Echo == 0);
//波发出去的那一下,开始启动定时器
TR1 = 1;
//3. 由高电平跳转回低电平,表示波回来了
while(Echo == 1);
//波回来的那一下,我们开始停止定时器
TR1 = 0;
//4. 计算出中间经过多少时间
time = (TH1 * 256 + TL1)*1.085;//us为单位
//5. 距离 = 速度 (340m/s)* 时间/2
return (time * 0.017);
}
//delay.c
#include "intrins.h"
void Delay2000ms() //@11.0592MHz
{
unsigned char i, j, k;
i = 15;
j = 2;
k = 235;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Delay10us() //@11.0592MHz
{
unsigned char i;
i = 2;
while (--i);
}
void Delay300ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 3;
j = 26;
k = 223;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Delay150ms() //@11.0592MHz
{
unsigned char i, j, k;
i = 2;
j = 13;
k = 237;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Delay450ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 4;
j = 39;
k = 209;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
//sg90.c
#include "reg52.h"
#include "delay.h"
sbit sg90_con = P1^1;
int jd;
int cnt = 0;
void Time0Init()
{
//1. 配置定时器0工作模式位16位计时
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x01;
//2. 给初值,定一个0.5出来
TL0=0x33;
TH0=0xFE;
//3. 开始计时
TR0 = 1;
TF0 = 0;
//4. 打开定时器0中断
ET0 = 1;
//5. 打开总中断EA
EA = 1;
}
void sgMiddle()
{
//中间位置
jd = 3; //90度 1.5ms高电平
cnt = 0;
}
void sgLeft()
{
//左边位置
jd = 5; //135度 1.5ms高电平
cnt = 0;
}
void sgRight()
{
//右边位置
jd = 1; //0度
cnt = 0;
}
void Time0Handler() interrupt 1
{
cnt++; //统计爆表的次数. cnt=1的时候,报表了1
//重新给初值
TL0=0x33;
TH0=0xFE;
//控制PWM波
if(cnt < jd){
sg90_con = 1;
}else{
sg90_con = 0;
}
if(cnt == 40){//爆表40次,经过了20ms
cnt = 0; //当100次表示1s,重新让cnt从0开始,计算下一次的1s
sg90_con = 1;
}
}
//motor.c
#include "reg52.h"
sbit RightCon1A = P3^2;
sbit RightCon1B = P3^3;
sbit LeftCon1A = P3^4;
sbit LeftCon1B = P3^5;
void goForward()
{
LeftCon1A = 0;
LeftCon1B = 1;
RightCon1A = 0;
RightCon1B = 1;
}
void goRight()
{
LeftCon1A = 0;
LeftCon1B = 1;
RightCon1A = 0;
RightCon1B = 0;
}
void goLeft()
{
LeftCon1A = 0;
LeftCon1B = 0;
RightCon1A = 0;
RightCon1B = 1;
}
void goBack()
{
LeftCon1A = 1;
LeftCon1B = 0;
RightCon1A = 1;
RightCon1B = 0;
}
void stop()
{
LeftCon1A = 0;
LeftCon1B = 0;
RightCon1A = 0;
RightCon1B = 0;
}