前言
今天调试六轴陀螺仪 MPU6050
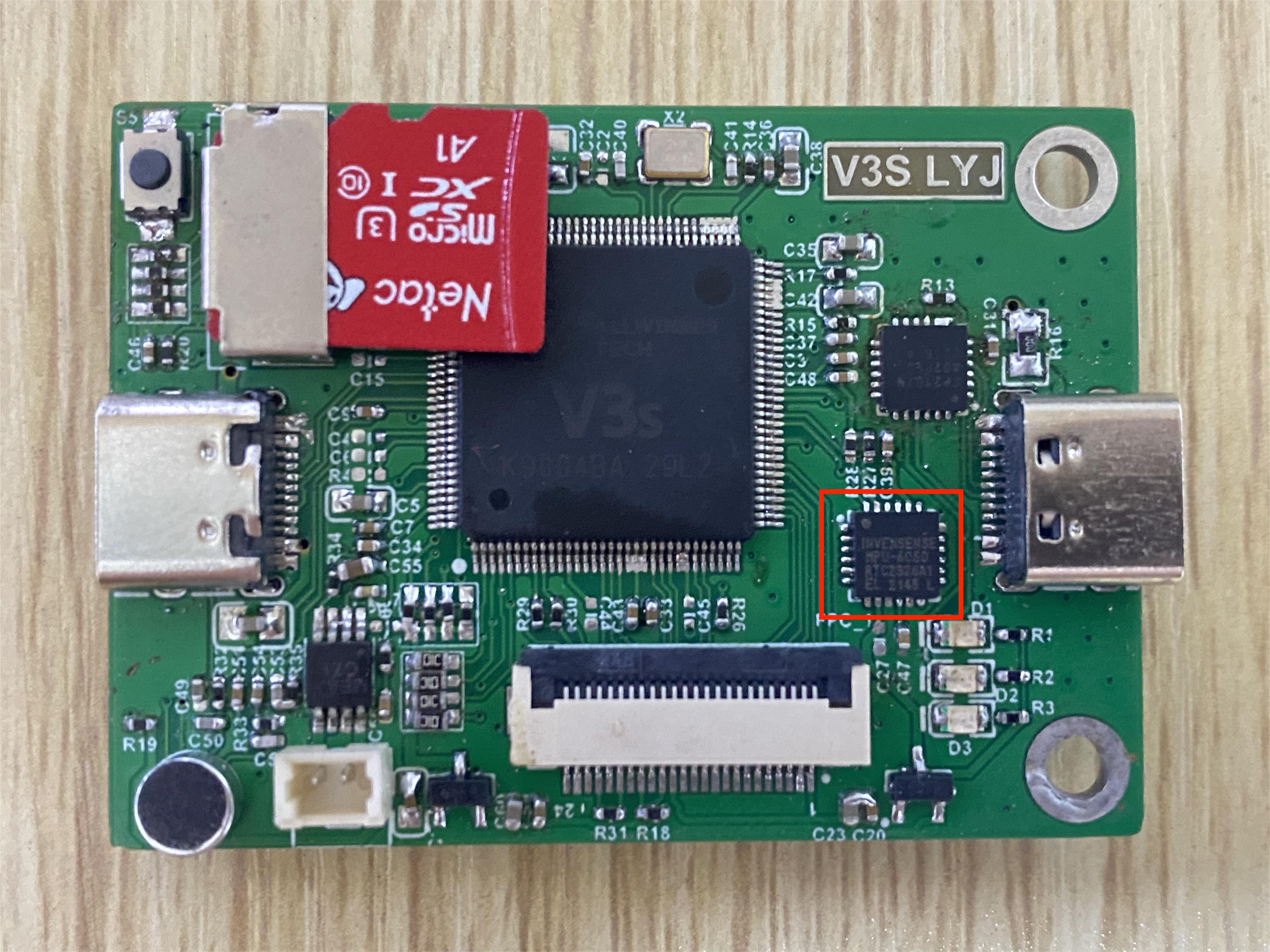
硬件
硬件很简单,使用 I2C 接口,并且没有使用中断引脚。
焊接上 MPU6050 芯片和上拉电阻、滤波电容。
检测
MPU6050 是挂在 I2C-0 上的,I2C-0 控制器的驱动已 OK,所以直接使用 I2C-0 检测 MPU6050 是否存在
# i2cdetect -y 0
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- 68 -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
MPU6050 的地址是 0x68,在 I2C-0 总线上检测到了,说明硬件焊接 OK
读取温度
按照之前写的一篇文章《Banana Pi M1 读取 MPU6050(Shell 脚本方式)》,使用 shell 脚本方式读取温度
# ./mpu6050.sh
34.70℃
34.84℃
34.89℃
34.98℃
35.03℃
35.73℃
35.08℃
35.12℃
35.12℃
35.26℃
35.17℃
35.36℃
35.31℃
35.26℃
35.36℃
35.31℃
驱动
一开始使用内核自带的 IIO 驱动,发现只能在 /sys/ 目录下读取相应的坐标值,读取 /dev/iio:device0 有问题,并且需要配置中断引脚才能编译通过。所以就不使用内核自带的驱动了。网上找了个 6050 的驱动
arch/arm/boot/dts/sun8i-v3s-licheepi-zero-dock.dts
&i2c0 {
pinctrl-0 = <&i2c0_pins>;
pinctrl-names = "default";
clock-frequency = <400000>;
status = "okay";
mpu6050_2: accelerometer@68_2 {
compatible = "lyj,mpu6050";
reg = <0x68>;
status = "okay";
};
};
i2c_mpu6050.c
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/uaccess.h>
#include <linux/i2c.h>
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <asm/mach/map.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <asm/io.h>
#include <linux/device.h>
#include <linux/platform_device.h>
#include "i2c_mpu6050.h"
/*------------------字符设备内容----------------------*/
#define DEV_NAME "I2C1_mpu6050"
#define DEV_CNT (1)
/*定义 led 资源结构体,保存获取得到的节点信息以及转换后的虚拟寄存器地址*/
static dev_t mpu6050_devno; //定义字符设备的设备号
static struct cdev mpu6050_chr_dev; //定义字符设备结构体chr_dev
struct class *class_mpu6050; //保存创建的类
struct device *device_mpu6050; // 保存创建的设备
struct device_node *mpu6050_device_node; //rgb_led的设备树节点结构体
/*------------------IIC设备内容----------------------*/
struct i2c_client *mpu6050_client = NULL; //保存mpu6050设备对应的i2c_client结构体,匹配成功后由.prob函数带回。
/*通过i2c 向mpu6050写入数据
*mpu6050_client:mpu6050的i2c_client结构体。
*address, 数据要写入的地址,
*data, 要写入的数据
*返回值,错误,-1。成功,0
*/
static int i2c_write_mpu6050(struct i2c_client *mpu6050_client, u8 address, u8 data)
{
int error = 0;
u8 write_data[2];
struct i2c_msg send_msg; //要发送的数据结构体
/*设置要发送的数据*/
write_data[0] = address;
write_data[1] = data;
/*发送 iic要写入的地址 reg*/
send_msg.addr = mpu6050_client->addr; //mpu6050在 iic 总线上的地址
send_msg.flags = 0; //标记为发送数据
send_msg.buf = write_data; //写入的首地址
send_msg.len = 2; //reg长度
/*执行发送*/
error = i2c_transfer(mpu6050_client->adapter, &send_msg, 1);
if (error != 1)
{
printk(KERN_DEBUG "\n i2c_transfer error \n");
return -1;
}
return 0;
}
/*通过i2c 向mpu6050写入数据
*mpu6050_client:mpu6050的i2c_client结构体。
*address, 要读取的地址,
*data,保存读取得到的数据
*length,读长度
*返回值,错误,-1。成功,0
*/
static int i2c_read_mpu6050(struct i2c_client *mpu6050_client, u8 address, void *data, u32 length)
{
int error = 0;
u8 address_data = address;
struct i2c_msg mpu6050_msg[2];
/*设置读取位置msg*/
mpu6050_msg[0].addr = mpu6050_client->addr; //mpu6050在 iic 总线上的地址
mpu6050_msg[0].flags = 0; //标记为发送数据
mpu6050_msg[0].buf = &address_data; //写入的首地址
mpu6050_msg[0].len = 1; //写入长度
/*设置读取位置msg*/
mpu6050_msg[1].addr = mpu6050_client->addr; //mpu6050在 iic 总线上的地址
mpu6050_msg[1].flags = I2C_M_RD; //标记为读取数据
mpu6050_msg[1].buf = data; //读取得到的数据保存位置
mpu6050_msg[1].len = length; //读取长度
error = i2c_transfer(mpu6050_client->adapter, mpu6050_msg, 2);
if (error != 2) {
printk(KERN_DEBUG "\n i2c_read_mpu6050 error \n");
return -1;
}
return 0;
}
/*初始化i2c
*返回值,成功,返回0。失败,返回 -1
*/
static int mpu6050_init(void)
{
int error = 0;
/*配置mpu6050*/
error += i2c_write_mpu6050(mpu6050_client, PWR_MGMT_1, 0X00);
error += i2c_write_mpu6050(mpu6050_client, SMPLRT_DIV, 0X07);
error += i2c_write_mpu6050(mpu6050_client, CONFIG, 0X06);
error += i2c_write_mpu6050(mpu6050_client, ACCEL_CONFIG, 0X01);
if (error < 0) {
/*初始化错误*/
printk(KERN_DEBUG "\n mpu6050_init error \n");
return -1;
}
return 0;
}
/*字符设备操作函数集,open函数实现*/
static int mpu6050_open(struct inode *inode, struct file *filp)
{
// printk("\n mpu6050_open \n");
/*向 mpu6050 发送配置数据,让mpu6050处于正常工作状态*/
mpu6050_init();
return 0;
}
/*字符设备操作函数集,.read函数实现*/
static ssize_t mpu6050_read(struct file *filp, char __user *buf, size_t cnt, loff_t *off)
{
char data_H;
char data_L;
int error;
short mpu6050_result[6]; //保存mpu6050转换得到的原始数据
// printk("\n mpu6050_read \n");
i2c_read_mpu6050(mpu6050_client, ACCEL_XOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, ACCEL_XOUT_L, &data_L, 1);
mpu6050_result[0] = data_H << 8;
mpu6050_result[0] += data_L;
i2c_read_mpu6050(mpu6050_client, ACCEL_YOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, ACCEL_YOUT_L, &data_L, 1);
mpu6050_result[1] = data_H << 8;
mpu6050_result[1] += data_L;
i2c_read_mpu6050(mpu6050_client, ACCEL_ZOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, ACCEL_ZOUT_L, &data_L, 1);
mpu6050_result[2] = data_H << 8;
mpu6050_result[2] += data_L;
i2c_read_mpu6050(mpu6050_client, GYRO_XOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, GYRO_XOUT_L, &data_L, 1);
mpu6050_result[3] = data_H << 8;
mpu6050_result[3] += data_L;
i2c_read_mpu6050(mpu6050_client, GYRO_YOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, GYRO_YOUT_L, &data_L, 1);
mpu6050_result[4] = data_H << 8;
mpu6050_result[4] += data_L;
i2c_read_mpu6050(mpu6050_client, GYRO_ZOUT_H, &data_H, 1);
i2c_read_mpu6050(mpu6050_client, GYRO_ZOUT_L, &data_L, 1);
mpu6050_result[5] = data_H << 8;
mpu6050_result[5] += data_L;
// printk("AX=%d, AY=%d, AZ=%d \n",(int)mpu6050_result[0],(int)mpu6050_result[1],(int)mpu6050_result[2]);
// printk("GX=%d, GY=%d, GZ=%d \n \n",(int)mpu6050_result[3],(int)mpu6050_result[4],(int)mpu6050_result[5]);
/*将读取得到的数据拷贝到用户空间*/
error = copy_to_user(buf, mpu6050_result, cnt);
if(error != 0) {
printk("copy_to_user error!");
return -1;
}
return 0;
}
/*字符设备操作函数集,.release函数实现*/
static int mpu6050_release(struct inode *inode, struct file *filp)
{
// printk("\n mpu6050_release \n");
/*向mpu6050发送命令,使mpu6050进入关机状态*/
return 0;
}
/*字符设备操作函数集*/
static struct file_operations mpu6050_chr_dev_fops = {
.owner = THIS_MODULE,
.open = mpu6050_open,
.read = mpu6050_read,
.release = mpu6050_release,
};
/*----------------平台驱动函数集-----------------*/
static int mpu6050_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
int ret = -1; //保存错误状态码
printk(KERN_EMERG "\t match successed \n");
/*---------------------注册 字符设备部分-----------------*/
//采用动态分配的方式,获取设备编号,次设备号为0,
//设备名称为rgb-leds,可通过命令cat /proc/devices查看
//DEV_CNT为1,当前只申请一个设备编号
ret = alloc_chrdev_region(&mpu6050_devno, 0, DEV_CNT, DEV_NAME);
if (ret < 0) {
printk("fail to alloc mpu6050_devno\n");
goto alloc_err;
}
//关联字符设备结构体cdev与文件操作结构体file_operations
mpu6050_chr_dev.owner = THIS_MODULE;
cdev_init(&mpu6050_chr_dev, &mpu6050_chr_dev_fops);
// 添加设备至cdev_map散列表中
ret = cdev_add(&mpu6050_chr_dev, mpu6050_devno, DEV_CNT);
if (ret < 0) {
printk("fail to add cdev\n");
goto add_err;
}
/*创建类 */
class_mpu6050 = class_create(THIS_MODULE, DEV_NAME);
/*创建设备 DEV_NAME 指定设备名,*/
device_mpu6050 = device_create(class_mpu6050, NULL, mpu6050_devno, NULL, DEV_NAME);
mpu6050_client = client;
return 0;
add_err:
// 添加设备失败时,需要注销设备号
unregister_chrdev_region(mpu6050_devno, DEV_CNT);
printk("\n error! \n");
alloc_err:
return -1;
}
static int mpu6050_remove(struct i2c_client *client)
{
/*删除设备*/
device_destroy(class_mpu6050, mpu6050_devno); //清除设备
class_destroy(class_mpu6050); //清除类
cdev_del(&mpu6050_chr_dev); //清除设备号
unregister_chrdev_region(mpu6050_devno, DEV_CNT); //取消注册字符设备
return 0;
}
/*定义ID 匹配表*/
static const struct i2c_device_id gtp_device_id[] = {
{"lyj,mpu6050", 0},
{},
};
/*定义设备树匹配表*/
static const struct of_device_id mpu6050_of_match_table[] = {
{.compatible = "lyj,mpu6050"},
{/* sentinel */},
};
/*定义i2c总线设备结构体*/
struct i2c_driver mpu6050_driver = {
.probe = mpu6050_probe,
.remove = mpu6050_remove,
.id_table = gtp_device_id,
.driver = {
.name = "lyj,mpu6050",
.owner = THIS_MODULE,
.of_match_table = mpu6050_of_match_table,
},
};
/*
*驱动初始化函数
*/
static int __init mpu6050_driver_init(void)
{
int ret;
pr_info("mpu6050_driver_init\n");
ret = i2c_add_driver(&mpu6050_driver);
return ret;
}
/*
*驱动注销函数
*/
static void __exit mpu6050_driver_exit(void)
{
pr_info("mpu6050_driver_exit\n");
i2c_del_driver(&mpu6050_driver);
}
module_init(mpu6050_driver_init);
module_exit(mpu6050_driver_exit);
MODULE_LICENSE("GPL");
test_app.c
#include <stdio.h>
#include <unistd.h>
#include <fcntl.h>
#include <string.h>
#include <stdlib.h>
int main(int argc, char *argv[])
{
int error;
short resive_data[6]; //保存收到的 mpu6050转换结果数据,依次为 AX(x轴角度), AY, AZ 。GX(x轴加速度), GY ,GZ
/*打开文件*/
int fd = open(argv[1], O_RDWR);
if (fd < 0) {
printf("open file : %s failed !\n", argv[0]);
return -1;
}
/*读取数据*/
while (1) {
error = read(fd, resive_data, 12);
if (error < 0) {
printf("write file error! \n");
close(fd);
/*判断是否关闭成功*/
}
/*打印数据*/
printf("AX = %6d, AY = %6d, AZ = %6d", (int)resive_data[0], (int)resive_data[1], (int)resive_data[2]);
printf("\t\tGX = %6d, GY = %6d, GZ = %6d\n", (int)resive_data[3], (int)resive_data[4], (int)resive_data[5]);
sleep(1);
}
/*关闭文件*/
error = close(fd);
if (error < 0) {
printf("close file error! \n");
}
return 0;
}
Makefile
obj-m = i2c_mpu6050.o
APP = test_app
KDIR=/home/liyongjun/project/board/buildroot/DIY_V3S/build/linux-5.3.5
CROSS_COMPILE=/home/liyongjun/project/board/buildroot/DIY_V3S/host/bin/arm-buildroot-linux-gnueabihf-
all:
make -C $(KDIR) M=$(PWD) ARCH=arm CROSS_COMPILE=$(CROSS_COMPILE) modules
$(CROSS_COMPILE)gcc -o $(APP) test_app.c
clean:
make -C $(KDIR) M=$(PWD) ARCH=arm CROSS_COMPILE=$(CROSS_COMPILE) clean
rm $(APP)
测试
安装驱动,运行 APP,转动陀螺仪
# insmod i2c_mpu6050.ko
[ 127.820667] i2c_mpu6050: loading out-of-tree module taints kernel.
[ 127.829072] mpu6050_driver_init
[ 127.833666] match successed
# ./test_app /dev/I2C1_mpu6050
AX = 574, AY = 198, AZ = 16784 GX = -50, GY = -189, GZ = -38
AX = 588, AY = 188, AZ = 16768 GX = -48, GY = -175, GZ = -40
AX = -10366, AY = -4508, AZ = 11164 GX = -9896, GY = 11097, GZ = -11451
AX = -14110, AY = 2746, AZ = 4270 GX = -27770, GY = -26383, GZ = 17776
AX = -9850, AY = 10674, AZ = -3436 GX = -8408, GY = 5019, GZ = 13314
AX = -7482, AY = -10730, AZ = -3054 GX = 4618, GY = -32440, GZ = 17968
AX = 1320, AY = 3748, AZ = 21040 GX = -15680, GY = 8252, GZ = 3408
AX = 9350, AY = 10816, AZ = -8042 GX = 3906, GY = 640, GZ = 12422
AX = -8470, AY = -5844, AZ = 6478 GX = 16069, GY = -32768, GZ = 12481
AX = -2542, AY = -11888, AZ = -14484 GX = 8449, GY = 22099, GZ = -30254
AX = -6590, AY = 9106, AZ = 13610 GX = -4507, GY = -32768, GZ = 28548
AX = -8738, AY = 6962, AZ = -3122 GX = -27485, GY = -12743, GZ = -23153
AX = -8436, AY = -2534, AZ = 13078 GX = 32767, GY = 10061, GZ = -12789
AX = -1298, AY = -12532, AZ = -12758 GX = -17934, GY = 3946, GZ = -5478
AX = 7988, AY = -3884, AZ = 14934 GX = 6224, GY = -9852, GZ = -7318
AX = 7812, AY = -7544, AZ = -12826 GX = -32768, GY = -3146, GZ = 3222
AX = 6158, AY = 1790, AZ = -14952 GX = 108, GY = -324, GZ = -209
至此,陀螺仪调试 OK