前言:
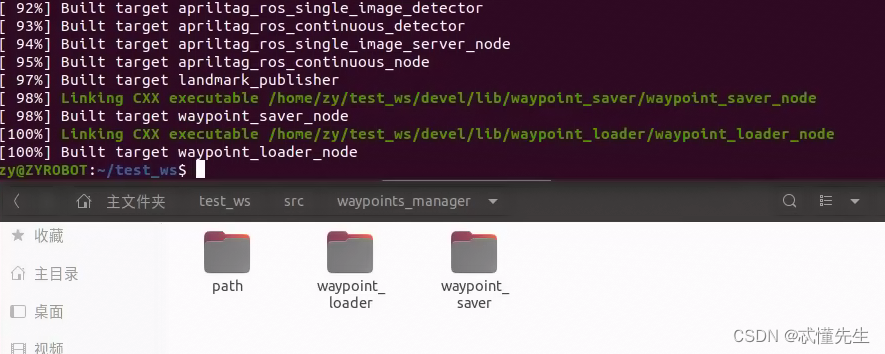
承接上一篇博文本文将编写并记录上文中详细的工程项目,用于保存小车的运动路径,生成对应的csv,和加载所保存的路径到实际的Rviz中,本文将开源完整的工程项目,工程结构如下:
工程原码位于文章末尾:
路径存储:
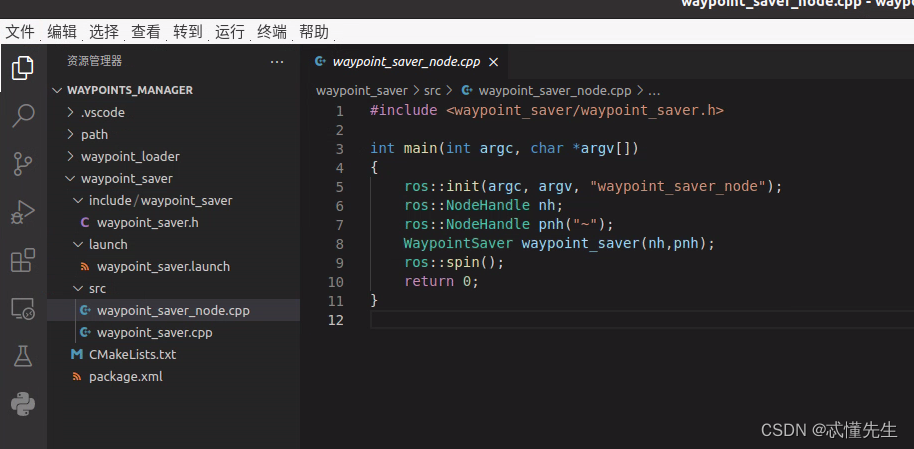
waypoint_saver 用于存储 waypoint 的节点
waypoint_saver.h 头h文件
#ifndef WAYPOINT_SAVER_WAYPOINT_SAVER_H_INCLUDED
#define WAYPOINT_SAVER_WAYPOINT_SAVER_H_INCLUDED
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <tf/tf.h>
#include <visualization_msgs/Marker.h>
#include <visualization_msgs/MarkerArray.h>
#include <fstream>
#include <sstream>
class WaypointSaver
{
public:
WaypointSaver(ros::NodeHandle nh,ros::No