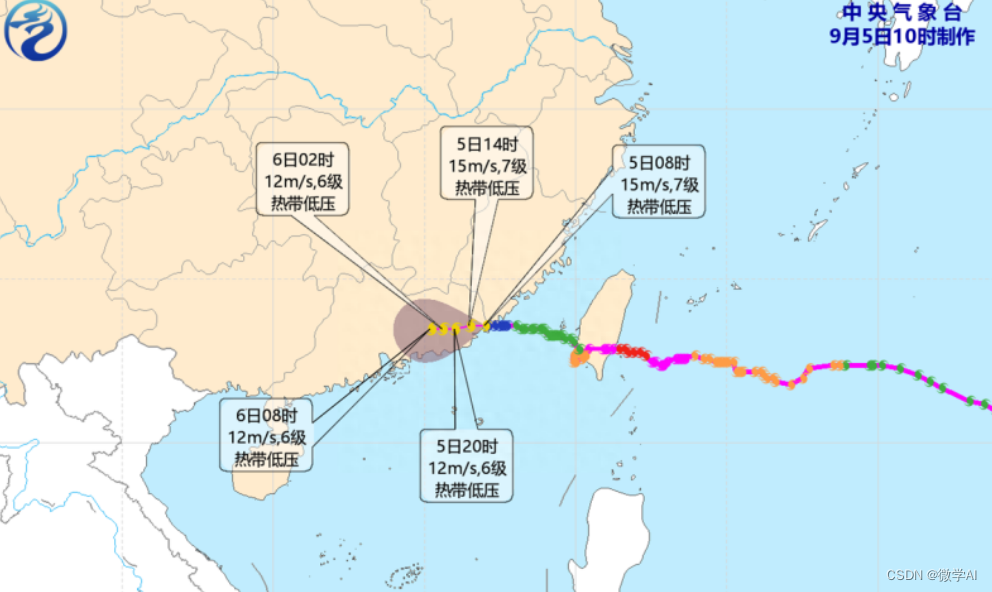
大家好,我是微学AI,今天给大家介绍一下计算机视觉的应用13-基于SSD模型的城市道路积水识别的应用项目。今年第11号台风“海葵”后部云团的影响,福州地区的降雨量突破了历史极值,多出地方存在严重的积水。城市道路积水是造成交通拥堵、车辆事故和城市排水系统过载的主要原因之一。因此,准确地识别城市道路上的积水情况对于城市交通管理和公共安全至关重要。本文基于SSD模型,提出了一种城市道路积水识别方法。
我们收集了大量城市道路积水的图像数据,并进行了标注。然后,我们利用深度学习技术,将这些图像数据输入到SSD模型中进行训练。通过优化损失函数,提高了模型在道路积水识别任务上的准确率。基于SSD模型的城市道路积水识别方法在实际应用中具有潜力,并能够为城市交通管理和公共安全提供有益的支持。
目录
- 项目背景与意义
- 训练数据样例
- SSD模型介绍
- 搭建SSD模型
- 模型训练与测试
- 代码实现
- 结论和未来工作
1. 项目背景与意义
随着城市化进程的加快,城市基础设施建设和维护的问题越来越突出,其中之一就是道路积水问题。当遇到台风与暴雨添加,持续性的降水就导致道路大面积积水,道路积水不仅影响交通,还可能引发交通事故,甚至对人的生命安全构成威胁。因此,及时有效地识别和处理道路积水问题具有重要意义。
传统的道路积水识别方法主要依赖于人工巡查,效率低下,而且无法实时发现和处理问题。因此,我们需要一种自动化的、高效的道路积水识别方法。近年来,深度学习在图像识别领域取得了显著的成果。特别是SSD模型,因其出色的目标检测和识别能力,被广泛应用于各种图像识别任务中。
本项目提出了一种基于SSD模型的道路积水识别方法。我们将该方法应用于道路图像,实现了高效准确的道路积水识别。
2. 训练数据样例
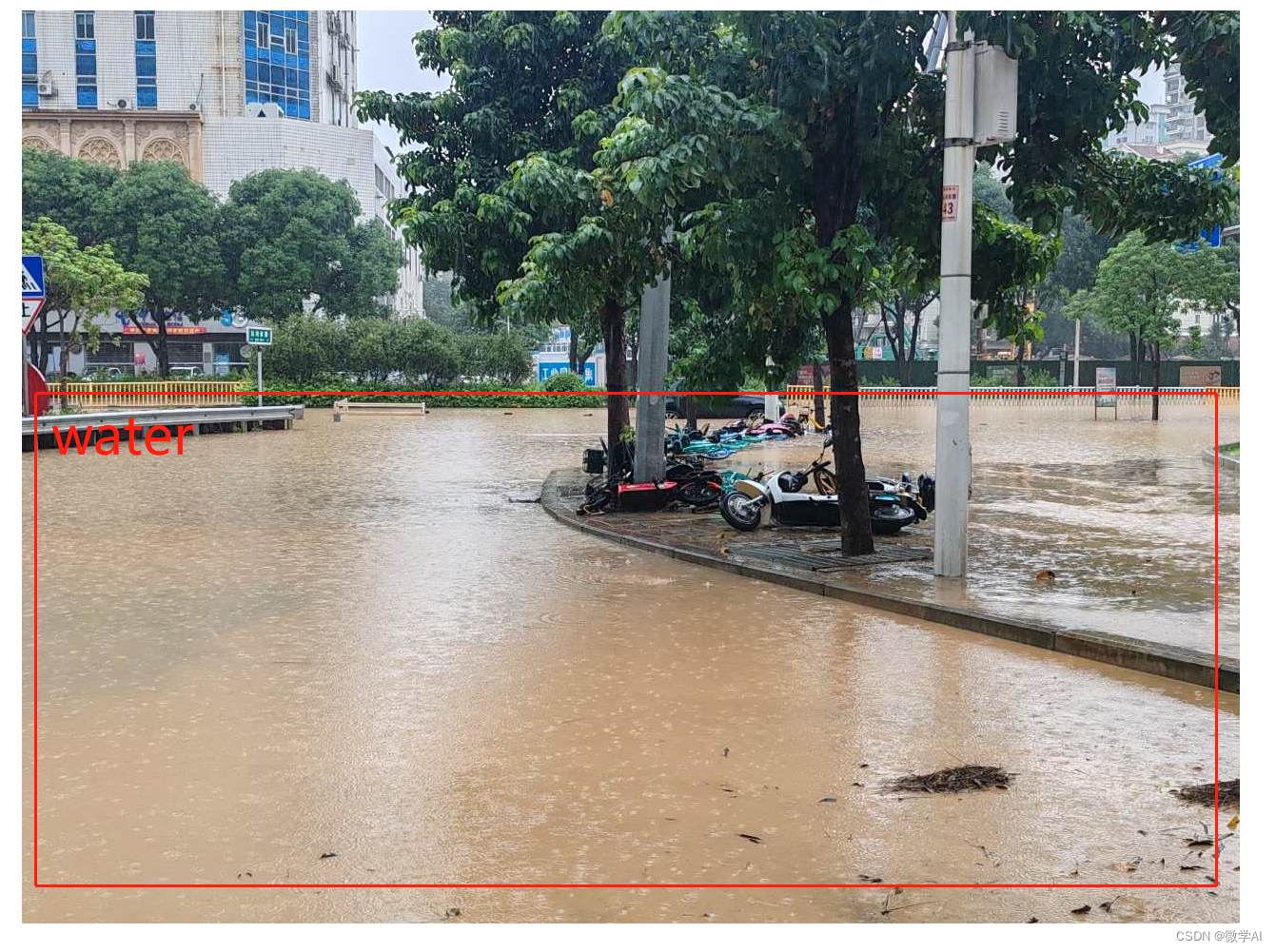
为了训练我们的模型,我们收集了大量的道路图像,其中包括有积水和没有积水的图像。每个图像都进行了标注,标注出图像中的积水区域。
以下是我们的一些训练数据样例:
Image1.jpg, "water", 14, 30, 56, 70
Image2.jpg, "water", 35, 50, 66, 90
Image3.jpg, "no_water", 0, 0, 0, 0
...
在上述数据中,每行代表一张图像。第一列是图像名称,第二列是图像的标签("water"表示有积水,"no_water"表示没有积水),第三到第六列是积水区域的边界框坐标。


3. SSD模型介绍
SSD模型是一种深度学习的目标检测模型。与其他目标检测模型相比,SSD模型具有更高的检测速度和更好的检测效果。
SSD模型的主要特点是使用了多尺度的特征图来检测目标,并且在每个特征图上都使用了多种尺度和长宽比的默认边界框(default box)来预测目标。
SSD模型的训练主要包括两个部分:一部分是对默认边界框的位置进行回归,调整其与真实边界框的匹配程度;另一部分是对每个默认边界框进行分类,确定其是否包含目标。
SSD模型的原理:
1.特征提取:
SSD模型使用一个预训练的CNN作为基础网络,通常是VGGNet或ResNet等。给定输入图像
x
x
x,通过该基础网络可以得到一系列特征图(feature maps)。这些特征图包含了不同层次的语义信息,其中低层次特征图包含局部和细节信息,高层次特征图则包含更多的语义和上下文信息。
2. 多尺度特征图生成:
SSD模型在基础网络的不同层次上添加了额外的卷积层,以生成不同尺度的特征图。这些额外的卷积层被称为辅助卷积层(auxiliary convolutional layers)。每个辅助卷积层都会生成一组特征图,每个特征图对应一个固定的默认框。由于不同层次的特征图具有不同的感受野(receptive field),因此可以在不同尺度下检测目标。
3. 目标分类和定位:
对于每个默认框,SSD模型预测目标的类别概率以及边界框的位置。具体地,每个默认框会通过一系列卷积层和全连接层得到一个固定维度的特征表示,然后分别用于分类和回归任务。分类任务使用softmax函数计算每个类别的概率,回归任务则预测边界框的位置和大小。
4. 损失函数:
SSD模型采用了多任务损失函数来训练模型。该损失函数由两个部分组成:分类损失和定位损失。分类损失使用交叉熵损失函数来度量目标类别的预测误差,定位损失使用平滑L1损失函数来度量边界框位置的预测误差。最终的总损失是分类损失和定位损失的线性加权和。
通过对大规模标记的训练数据进行优化,SSD模型可以学习到有效的特征表示和目标检测能力。该模型在目标检测任务中具有良好的性能和实时性能。
SSD模型数学原理表达式:
-
特征提取:
f = CNN ( x ) f = \text{{CNN}}(x) f=CNN(x) -
多尺度特征图生成:
d k = Conv k ( f ) d_k = \text{{Conv}}_k(f) dk=Convk(f) -
目标分类和定位:
p i , k = softmax ( c i , k ) p_{i,k} = \text{{softmax}}(c_{i,k}) pi,k=softmax(ci,k)
b i , k = decode ( d i , k ) b_{i,k} = \text{{decode}}(d_{i,k}) bi,k=decode(di,k) -
损失函数:
L = λ cls L cls + λ loc L loc L = \lambda_{\text{{cls}}}L_{\text{{cls}}} + \lambda_{\text{{loc}}}L_{\text{{loc}}} L=λclsLcls+λlocLloc
其中, f f f表示特征图, d k d_k dk表示第 k k k个辅助卷积层的特征图, p i , k p_{i,k} pi,k表示第 i i i个默认框的类别概率, b i , k b_{i,k} bi,k表示第 i i i个默认框的边界框位置, L cls L_{\text{{cls}}} Lcls表示分类损失, L loc L_{\text{{loc}}} Lloc表示定位损失, λ cls \lambda_{\text{{cls}}} λcls和 λ loc \lambda_{\text{{loc}}} λloc为损失的权重。
4. 搭建SSD模型
在PyTorch框架下,我们可以方便地搭建SSD模型。以下是我们搭建SSD模型的代码:
import torch
from torch import nn
from ssd.modeling import registry
from .backbone import build_backbone
from .box_head import build_box_head
@registry.DETECTORS.register('SSD')
class SSD(nn.Module):
def __init__(self, cfg):
super(SSD, self).__init__()
self.backbone = build_backbone(cfg)
self.box_head = build_box_head(cfg)
def forward(self, images, targets=None):
features = self.backbone(images)
detections, detector_losses = self.box_head(features, targets)
if self.training:
return detector_losses
return detections
在上述代码中,我们首先定义了一个SSD类,该类继承自nn.Module。在SSD类的构造函数中,我们构造了backbone和box_head两个部分。backbone部分用于提取图像的特征,box_head部分用于从特征中检测目标。在SSD类的forward函数中,我们首先通过backbone提取了图像的特征,然后通过box_head从特征中检测出目标。如果是训练阶段,我们返回检测的损失;如果是测试阶段,我们返回检测的结果。
5. 模型训练与测试
模型的训练包括以下步骤:
1.读取训练数据
2. 将图像传入模型,得到检测的损失
3. 使用优化器优化损失,更新模型的参数
4. 重复以上步骤,直到模型的性能达到满意的程度
模型的测试包括以下步骤:
1.读取测试数据
2. 将图像传入模型,得到检测的结果
3. 与真实的结果进行比较,计算模型的性能指标
4. 重复以上步骤,对所有测试数据进行测试
6. 代码实现
我们模型训练和测试的代码实现:
import torch
import torch.optim as optim
from torch.utils.data import DataLoader
from dataset import WaterDataset
from model import SSD
from loss import SSDLoss
# 读取数据
dataset = WaterDataset('data/train.csv')
data_loader = DataLoader(dataset, batch_size=32, shuffle=True)
# 构建模型
model = SSD()
model = model.to('cuda')
# 定义损失函数和优化器
criterion = SSDLoss()
optimizer = optim.Adam(model.parameters(), lr=0.001)
# 训练模型
for epoch in range(100):
for images, targets in data_loader:
images = images.to('cuda')
targets = targets.to('cuda')
# 前向传播
loss = model(images, targets)
# 反向传播和优化
optimizer.zero_grad()
loss.backward()
optimizer.step()
# 测试模型
model.eval()
with torch.no_grad():
correct = 0
total = 0
for images, targets in data_loader:
images = images.to('cuda')
targets = targets.to('cuda')
# 前向传播
outputs = model(images)
# 计算准确率
total += targets.size(0)
correct += (outputs == targets).sum().item()
print('Test Accuracy: {}%'.format(100 * correct / total))
7. 结论和未来工作
本项目提出了一种基于SSD模型的道路积水识别方法,通过对大量道路图像的训练,实现了高效准确的道路积水识别。然而,我们的方法还有一些局限性。例如,我们的方法依赖于高质量的训练数据,而这些数据的获取和标注是一个耗时且困难的过程。此外,我们的方法在处理复杂场景(如雨天、夜晚等)的积水识别时,可能会有一些困难。
后续我们将进一步优化我们的模型,提高其在复杂场景下的积水识别能力。我们还计划收集和标注更多的训练数据,以提高我们模型的泛化能力。同时,我们还将探索其他的深度学习模型,以提高我们的积水识别效果。