机器学习笔记之最优化理论与方法——无约束优化问题[最优性条件]
- 引言
- 无约束优化问题
- 无约束优化问题最优解的定义
- 无约束优化问题的最优性条件
- 无约束优化问题的充要条件
- 无约束优化问题的必要条件
- 无约束优化问题的充分条件
引言
本节将介绍无约束优化问题,主要介绍无约束优化问题最优解的相关性质。
本节是关于以优化算法——无约束算法概述为首,优化算法——线搜索方法(二~九)的理论补充。
无约束优化问题
无约束优化问题的数学符号表示如下:
仅需要对目标函数进行最小化,没有可行域的条件限制。
min
f
(
x
)
\min f(x)
minf(x)
在实际问题中,很多问题可以被建模成无约束优化问题。例如:线性回归方法中的最小二乘估计问题。对应数学符号表示如下:
很明显,最小二乘函数
∥
A
x
−
b
∥
2
2
\|\mathcal A x - b\|_2^2
∥Ax−b∥22明显是一个凸函数:其二次型系数矩阵
A
T
A
\mathcal A^T\mathcal A
ATA必然是半正定矩阵。
f
(
x
)
=
∥
A
x
−
b
∥
2
2
=
(
A
x
−
b
)
T
(
A
x
−
b
)
=
x
T
[
A
T
A
]
x
+
b
T
A
x
−
x
T
A
T
b
+
b
T
b
\begin{aligned} f(x) & = \|\mathcal Ax - b\|_2^2 \\ & = (\mathcal Ax - b)^T(\mathcal Ax - b) \\ & = x^T [\mathcal A^T\mathcal A] x + b^T \mathcal A x - x^T \mathcal A^T b + b^Tb \end{aligned}
f(x)=∥Ax−b∥22=(Ax−b)T(Ax−b)=xT[ATA]x+bTAx−xTATb+bTb
因而该问题可以更精确地描述为无约束凸优化问题。
min
∥
A
x
−
b
∥
2
2
\min \|\mathcal A x - b\|_2^2
min∥Ax−b∥22
可以采用适当方法将约束优化问题转换为无约束优化问题。例如最优化问题概述中提到的罚函数法。
无约束优化问题最优解的定义
- 局部最优解 :假设
x
ˉ
\bar{x}
xˉ是关于目标函数
f
(
⋅
)
f(\cdot)
f(⋅)无约束优化问题的局部最优解,对于
∀
x
∈
N
ϵ
(
x
ˉ
)
\forall x \in \mathcal N_\epsilon(\bar{x})
∀x∈Nϵ(xˉ),必然有:
其中N ϵ ( x ˉ ) \mathcal N_{\epsilon}(\bar{x}) Nϵ(xˉ)表示包含点x ˉ \bar{x} xˉ,并且使用ϵ \epsilon ϵ表示范围的邻域。例如:( x ˉ − ϵ , x ˉ + ϵ ) (\bar{x} - \epsilon,\bar{x} + \epsilon) (xˉ−ϵ,xˉ+ϵ)
f ( x ) ≥ f ( x ˉ ) f(x) \geq f(\bar{x}) f(x)≥f(xˉ) - 全局最优解:相比于局部最优解,假设
x
∗
x^*
x∗是关于目标函数
f
(
⋅
)
f(\cdot)
f(⋅)无约束优化问题的全局最优解,对于
∀
x
∈
R
n
\forall x \in \mathbb R^n
∀x∈Rn,必然有:
f ( x ) ≥ f ( x ∗ ) f(x) \geq f(x^*) f(x)≥f(x∗) - 严格最优解:与凸函数:定义与基本性质中提到的严格凸函数类似,其核心是消除掉取等的情况。关于严格最优解,同样可以分为严格局部最优解与严格全局最优解。对应数学符号表示如下:
{ ∀ x ∈ R n , x ≠ x ∗ ⇒ f ( x ) > f ( x ∗ ) ∀ x ∈ N ϵ ( x ˉ ) , x ≠ x ˉ ⇒ f ( x ) > f ( x ˉ ) \begin{cases} \forall x \in \mathbb R^n,x \neq x^* \Rightarrow f(x) > f(x^*) \\ \forall x \in \mathcal N_{\epsilon}(\bar{x}), x \neq \bar{x} \Rightarrow f(x) > f(\bar{x}) \end{cases} {∀x∈Rn,x=x∗⇒f(x)>f(x∗)∀x∈Nϵ(xˉ),x=xˉ⇒f(x)>f(xˉ)
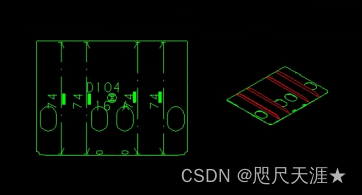
对应图像表示如下:

根据凸函数的定义可以看出, f ( ⋅ ) , G ( ⋅ ) f(\cdot),\mathcal G(\cdot) f(⋅),G(⋅)都是凸函数。其中 f ( ⋅ ) f(\cdot) f(⋅)中描述的红色点是严格最优解;而红色点 G ( x ∗ ) \mathcal G(x^*) G(x∗)是最优解的条件下, ∃ x ≠ x ∗ ⇒ f ( x ) = f ( x ∗ ) \exist x \neq x^* \Rightarrow f(x) = f(x^*) ∃x=x∗⇒f(x)=f(x∗)。那么该函数的最优解不是严格最优解。
无约束优化问题的最优性条件
针对无约束优化问题 ⇒ min f ( x ) \Rightarrow \min f(x) ⇒minf(x):
无约束优化问题的充要条件
如果目标函数
f
(
x
)
f(x)
f(x)是凸函数,则存在如下等价条件:
关于无约束凸优化问题,详细解释见最优化理论与方法——凸优化问题(上),这里不再赘述。
x
∗
is Optimal
⇔
∇
f
(
x
∗
)
=
0
x^* \text{ is Optimal } \Leftrightarrow \nabla f(x^*) = 0
x∗ is Optimal ⇔∇f(x∗)=0
无约束优化问题的必要条件
如果目标函数 f ( x ) f(x) f(x)不是凸函数,只是一般函数,上述的充要条件不一定成立,但一定满足如下必要条件:
如果x ∗ x^* x∗是最优解,那么它一定是平稳点;如果f ( ⋅ ) f(\cdot) f(⋅)在x ∗ x^* x∗位置的Hessian Matrix ⇒ ∇ 2 f ( x ∗ ) \text{Hessian Matrix} \Rightarrow \nabla^2 f(x^*) Hessian Matrix⇒∇2f(x∗)存在,那么该矩阵至少是半正定矩阵;如果将f ( ⋅ ) f(\cdot) f(⋅)退化成一元函数,必然有:f ′ ′ ( x ∗ ) ≥ 0 f''(x^*) \geq 0 f′′(x∗)≥0。
x ∗ is Optimal ⇒ { ∇ f ( x ∗ ) = 0 ∇ 2 f ( x ∗ ) ≽ 0 x^* \text{ is Optimal } \Rightarrow \begin{cases} \nabla f(x^*) = 0 \\ \nabla^2 f(x^*) \succcurlyeq 0 \end{cases} x∗ is Optimal ⇒{∇f(x∗)=0∇2f(x∗)≽0
证明:
- 已知
x
∗
x^*
x∗是最优解,不妨设:
∇
f
(
x
∗
)
≠
0
\nabla f(x^*) \neq 0
∇f(x∗)=0,必然存在负梯度方向:
d
=
−
∇
f
(
x
∗
)
d = - \nabla f(x^*)
d=−∇f(x∗)。
以 x ∗ x^* x∗为起始点,沿着负梯度方向前进较小的一段距离: f ( x ∗ + λ ⋅ d ) f(x^* + \lambda \cdot d) f(x∗+λ⋅d),并将其进行泰勒展开:
思路:前进一小段距离后,必然会导致目标函数值下降;从而x ∗ x^* x∗不是最优解了,产生矛盾。
f ( x ∗ + λ ⋅ d ) = f ( x ∗ ) + 1 1 ! λ [ ∇ f ( x ∗ ) ] T d + O ( λ ∥ d ∥ ) λ ∈ ( 0 , 1 ) f(x^* + \lambda \cdot d) = f(x^*) + \frac{1}{1!} \lambda [\nabla f(x^*)]^Td + \mathcal O(\lambda \|d\|) \quad \lambda \in (0,1) f(x∗+λ⋅d)=f(x∗)+1!1λ[∇f(x∗)]Td+O(λ∥d∥)λ∈(0,1)
经过整理,有:
关于λ \lambda λ范围后面不再赘述。
f ( x ∗ + λ ⋅ d ) − f ( x ∗ ) λ = [ ∇ f ( x ∗ ) ] T d + O ( λ ∥ d ∥ ) λ \frac{f(x^* + \lambda \cdot d) - f(x^*)}{\lambda} = [\nabla f(x^*)]^T d + \frac{\mathcal O(\lambda \|d\|)}{\lambda} λf(x∗+λ⋅d)−f(x∗)=[∇f(x∗)]Td+λO(λ∥d∥)
将 d = − ∇ f ( x ∗ ) d = -\nabla f(x^*) d=−∇f(x∗)代入,必然有:
[ ∇ f ( x ∗ ) ] T d = − ∣ ∣ ∇ f ( x ∗ ) ∣ ∣ 2 < 0 [\nabla f(x^*)]^T d = - ||\nabla f(x^*)||^2 < 0 [∇f(x∗)]Td=−∣∣∇f(x∗)∣∣2<0
当 λ ⇒ 0 \lambda \Rightarrow 0 λ⇒0时,有:
lim λ ⇒ 0 f ( x ∗ + λ ⋅ d ) − f ( x ∗ ) λ = lim λ ⇒ 0 { [ ∇ f ( x ∗ ) ] T d ⏟ < 0 + O ( λ ⋅ ∥ d ∥ ) λ ⏟ = 0 } < 0 \mathop{\lim}\limits_{\lambda \Rightarrow 0} \frac{f(x^* + \lambda \cdot d) - f(x^*)}{\lambda} = \mathop{\lim}\limits_{\lambda \Rightarrow 0} \left\{\underbrace{[\nabla f(x^*)]^T d}_{< 0} + \underbrace{\frac{\mathcal O(\lambda \cdot \|d\|)}{\lambda}}_{=0}\right\} < 0 λ⇒0limλf(x∗+λ⋅d)−f(x∗)=λ⇒0lim⎩ ⎨ ⎧<0 [∇f(x∗)]Td+=0 λO(λ⋅∥d∥)⎭ ⎬ ⎫<0
从而:
lim λ ⇒ 0 f ( x ∗ + λ ⋅ d ) − f ( x ∗ ) λ < 0 ⇒ lim λ ⇒ 0 f ( x ∗ + λ ⋅ d ) < f ( x ∗ ) \mathop{\lim}\limits_{\lambda \Rightarrow 0} \frac{f(x^* + \lambda \cdot d) - f(x^*)}{\lambda} < 0 \Rightarrow \mathop{\lim}\limits_{\lambda \Rightarrow 0} f(x^* + \lambda \cdot d) < f(x^*) λ⇒0limλf(x∗+λ⋅d)−f(x∗)<0⇒λ⇒0limf(x∗+λ⋅d)<f(x∗)
此时,发现了存在比 f ( x ∗ ) f(x^*) f(x∗)还要小的函数值 f ( x ∗ + λ ⋅ d ) f(x^* + \lambda \cdot d) f(x∗+λ⋅d),这意味着: x ∗ x^* x∗不是最优解。与条件矛盾,得证。也将 ∇ f ( x ∗ ) = 0 \nabla f(x^*) = 0 ∇f(x∗)=0称作一般函数 f ( ⋅ ) f(\cdot) f(⋅) x ∗ x^* x∗是最优解的一阶必要条件。 - 二阶必要条件证明:已知
x
∗
x^*
x∗是最优解,必然有:
∇
f
(
x
∗
)
=
0
\nabla f(x^*) = 0
∇f(x∗)=0。假设
x
∗
x^*
x∗位置的
Hessian Matrix
⇒
∇
2
f
(
x
∗
)
\text{Hessian Matrix} \Rightarrow \nabla^2 f(x^*)
Hessian Matrix⇒∇2f(x∗)低于半正定矩阵,必然有:
∃ d ≠ 0 ⇒ d T ∇ 2 f ( x ∗ ) d < 0 \exist d \neq 0 \Rightarrow d^T \nabla^2 f(x^*) d < 0 ∃d=0⇒dT∇2f(x∗)d<0
以 x ∗ x^* x∗为起始点, d d d为下降方向前进较小的一段距离: f ( x ∗ + λ ⋅ d ) f(x^* + \lambda \cdot d) f(x∗+λ⋅d),并将其进行泰勒展开:
与平稳点的证明相似,只不过需要二阶泰勒展开~
f ( x ∗ + λ ⋅ d ) = f ( x ∗ ) + 1 1 ! λ ⋅ [ ∇ f ( x ∗ ) ] T ⏟ = 0 d + 1 2 ! λ ⋅ d T ∇ 2 f ( x ∗ ) d + O ( λ 2 ⋅ ∥ d ∥ 2 ) = f ( x ∗ ) + 1 2 ! λ ⋅ d T ∇ 2 f ( x ∗ ) d + O ( λ 2 ⋅ ∥ d ∥ 2 ) \begin{aligned} f(x^* + \lambda \cdot d) & = f(x^*) + \frac{1}{1!} \lambda \cdot \underbrace{[\nabla f(x^*)]^T}_{=0}d + \frac{1}{2!} \lambda \cdot d^T \nabla^2 f(x^*) d + \mathcal O(\lambda^2 \cdot \|d\|^2) \\ & = f(x^*) + \frac{1}{2!} \lambda \cdot d^T \nabla^2 f(x^*) d + \mathcal O(\lambda^2 \cdot \|d\|^2) \end{aligned} f(x∗+λ⋅d)=f(x∗)+1!1λ⋅=0 [∇f(x∗)]Td+2!1λ⋅dT∇2f(x∗)d+O(λ2⋅∥d∥2)=f(x∗)+2!1λ⋅dT∇2f(x∗)d+O(λ2⋅∥d∥2)
经过整理,并令 λ ⇒ 0 \lambda \Rightarrow 0 λ⇒0,有:
lim λ ⇒ 0 f ( x ∗ + λ ⋅ d ) − f ( x ∗ ) λ 2 = 1 2 d T ∇ 2 f ( x ∗ ) d ⏟ < 0 + O ( λ 2 ⋅ ∥ d ∥ 2 ) λ 2 ⏟ = 0 < 0 \mathop{\lim}\limits_{\lambda \Rightarrow 0} \frac{f(x^* + \lambda \cdot d) - f(x^*)}{\lambda^2} = \frac{1}{2}\underbrace{d^T \nabla^2 f(x^*) d}_{<0} + \underbrace{\frac{\mathcal O(\lambda^2 \cdot \|d\|^2)}{\lambda^2}}_{=0} < 0 λ⇒0limλ2f(x∗+λ⋅d)−f(x∗)=21<0 dT∇2f(x∗)d+=0 λ2O(λ2⋅∥d∥2)<0
从而 f ( x ∗ + λ ⋅ d ) < f ( x ∗ ) f(x^* + \lambda \cdot d) < f(x^*) f(x∗+λ⋅d)<f(x∗),从而与条件矛盾。因此:最优解 x ∗ x^* x∗对应的 ∇ 2 f ( x ∗ ) ≽ 0 \nabla^2 f(x^*) \succcurlyeq 0 ∇2f(x∗)≽0恒成立。
相反,如果存在某点
x
∗
x^*
x∗,使得:
∇
f
(
x
∗
)
=
0
\nabla f(x^*) = 0
∇f(x∗)=0且
∇
2
f
(
x
∗
)
≽
0
\nabla^2 f(x^*) \succcurlyeq 0
∇2f(x∗)≽0,那么点
x
∗
x^*
x∗是否为最优解
?
?
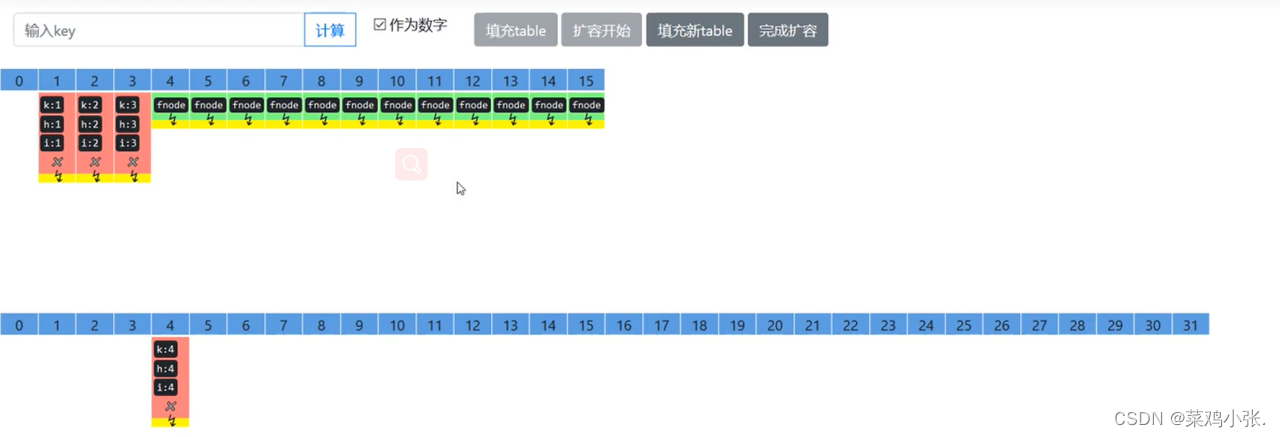
?不一定。例如:
f
(
x
)
=
x
3
f(x) = x^3
f(x)=x3,其函数图像表示如下:

在
x
=
0
x = 0
x=0处的梯度
∇
f
(
x
)
∣
x
=
0
=
0
\nabla f(x)|_{x=0} = 0
∇f(x)∣x=0=0;二阶梯度
∇
2
f
(
x
)
∣
x
=
0
=
0
\nabla^2 f(x) |_{x = 0} = 0
∇2f(x)∣x=0=0,均满足条件;但该点是一个鞍点,而不是最优解点。
无约束优化问题的充分条件
如果 f ( ⋅ ) f(\cdot) f(⋅)不是凸函数,只是一般函数,如果存在某点 x ∗ x^* x∗,满足: ∇ f ( x ∗ ) = 0 , ∇ 2 f ( x ∗ ) ≻ 0 \nabla f(x^*) =0,\nabla^2 f(x^*) \succ 0 ∇f(x∗)=0,∇2f(x∗)≻0,那么 x ∗ x^* x∗是严格最优解;
其中∇ 2 f ( x ∗ ) ≻ 0 \nabla^2 f(x^*) \succ 0 ∇2f(x∗)≻0表示函数f ( ⋅ ) f(\cdot) f(⋅)在x ∗ x^* x∗点处的Hessian Matrix \text{Hessian Matrix} Hessian Matrix是正定矩阵。需要注意的是,这里的严格最优解可能是严格局部最优解或者严格全局最优解。
证明:
要证上式,即证:
∀
x
∈
N
ϵ
(
x
∗
)
,
f
(
x
∗
)
<
f
(
x
)
\forall x \in \mathcal N_{\epsilon}(x^*),f(x^*) < f(x)
∀x∈Nϵ(x∗),f(x∗)<f(x)。
- 以
x
∗
x^*
x∗为起始点,朝着任意方向
d
d
d前进较小的距离,得到新的函数结果:
f
(
x
∗
+
λ
⋅
d
)
f(x^* + \lambda \cdot d)
f(x∗+λ⋅d)。观察:
f
(
x
∗
+
λ
⋅
d
)
f(x^* + \lambda \cdot d)
f(x∗+λ⋅d)与
f
(
x
∗
)
f(x^*)
f(x∗)之间的大小情况。使用泰勒公式展开:
为了简单起见,仅关注d d d的方向,而令d d d大小∥ d ∥ = 1 \|d\| = 1 ∥d∥=1
f ( x ∗ + λ ⋅ d ) = f ( x ∗ ) + 1 1 ! λ ⋅ [ ∇ f ( x ∗ ) ] T ⏟ = 0 d + 1 2 ! λ 2 d T ∇ 2 f ( x ∗ ) ⏟ ≻ 0 d + O ( λ 2 ) ∥ d ∥ 2 = 1 f(x^* + \lambda \cdot d) = f(x^*) + \frac{1}{1!} \lambda \cdot\underbrace{[\nabla f(x^*)]^T}_{=0} d + \frac{1}{2!} \lambda^2 d^T \underbrace{\nabla^2 f(x^*)}_{\succ 0}d + \mathcal O(\lambda^2) \quad \|d\|^2 = 1 f(x∗+λ⋅d)=f(x∗)+1!1λ⋅=0 [∇f(x∗)]Td+2!1λ2dT≻0 ∇2f(x∗)d+O(λ2)∥d∥2=1
整理上式,观察 f ( x ∗ + λ ⋅ d ) − f ( x ∗ ) f(x^* + \lambda \cdot d) - f(x^*) f(x∗+λ⋅d)−f(x∗)结果:
lim λ ⇒ 0 f ( x ∗ + λ ⋅ d ) − f ( x ∗ ) λ 2 = 1 2 d T ∇ 2 f ( x ∗ ) d > 0 \mathop{\lim}\limits_{\lambda \Rightarrow 0} \frac{f(x^* + \lambda \cdot d) - f(x^*)}{\lambda^2} = \frac{1}{2}d^T \nabla^2 f(x^*) d > 0 λ⇒0limλ2f(x∗+λ⋅d)−f(x∗)=21dT∇2f(x∗)d>0
从而 f ( x ∗ + λ ⋅ d ) > f ( x ∗ ) f(x^* + \lambda \cdot d) > f(x^*) f(x∗+λ⋅d)>f(x∗)。这意味着:在 x ∗ x^* x∗范围的小的邻域内, f ( x ∗ ) f(x^*) f(x∗)是最小值,并且是严格最小值,得证。
Reference
\text{Reference}
Reference:
最优化理论与方法-第五讲-无约束优化问题(一)