VPG算法
前言
首先来看经典的策略梯度REINFORCE算法:
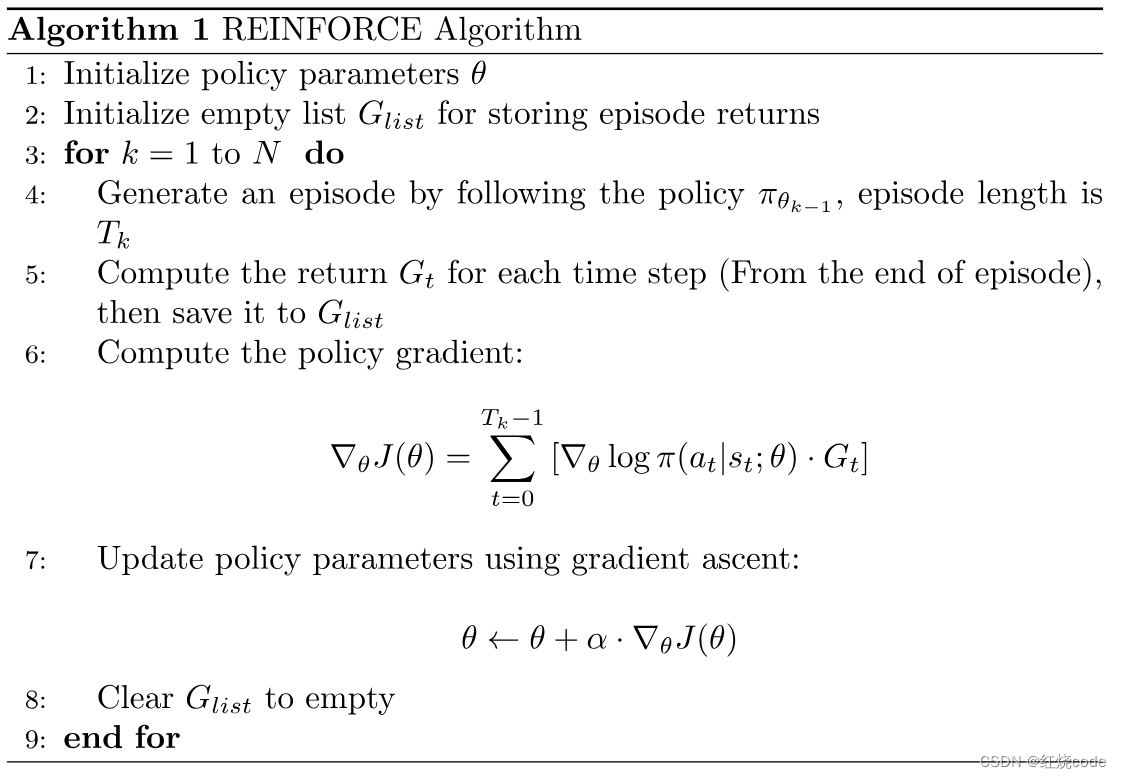
在REINFORCE中,每次采集一个episode的轨迹,计算每一步动作的回报 G t G_t Gt,与动作概率对数相乘,作为误差反向传播,有以下几个特点:
- 每个时间步更新一次参数
- 只有策略网络,没有价值网络
- 计算 G G G时,仅仅采样了一条轨迹
- 一般来说,计算 G G G时,从最后的时间步开始往前计算,这是为了节省计算量
- G G G实际上类似于 Q Q Q函数,因为 Q Q Q函数就是动作价值回报的期望
VPG算法
全称:Vanilla Policy Gradient,但是属于Actor-Critic算法,因为它既有策略网络,又有价值网络
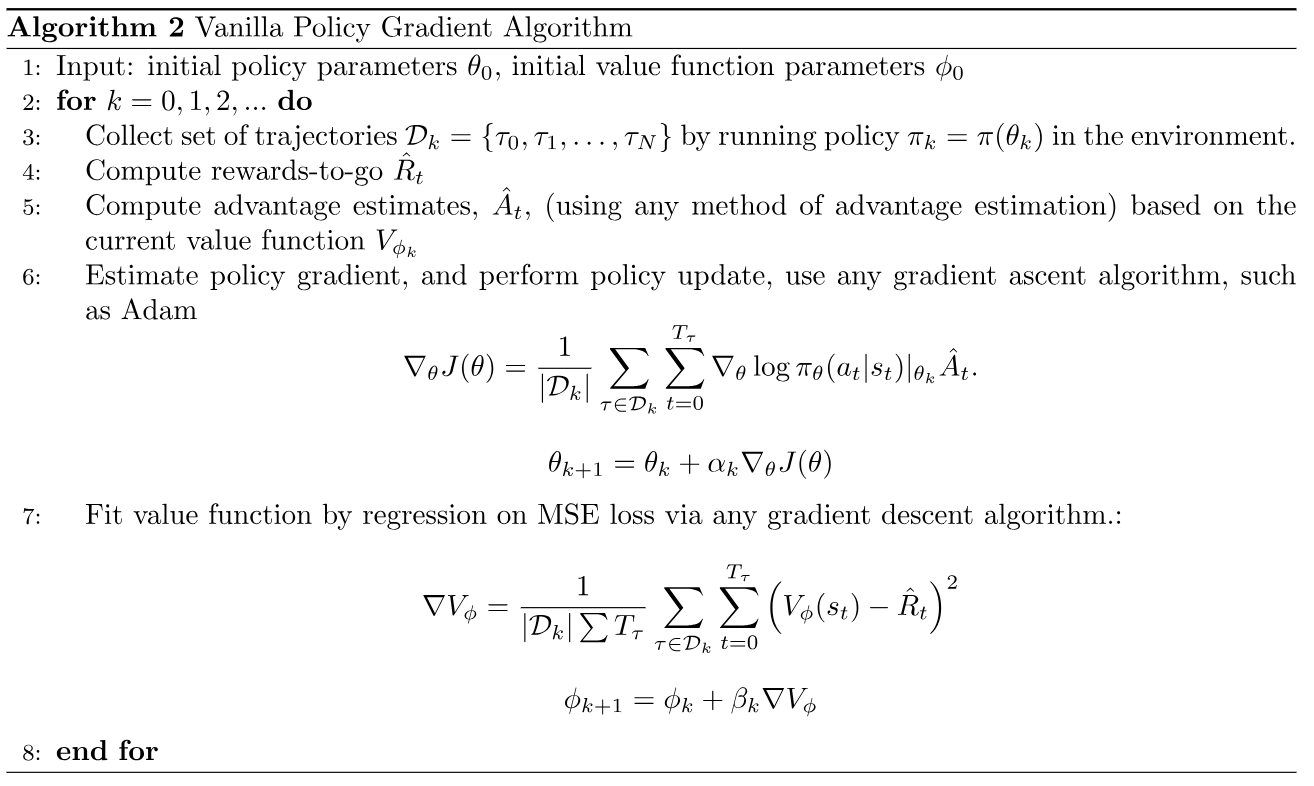
- 每个episode更新一次参数
- 上述伪代码中,计算 G G G时,采样了多个轨迹
- 一般来说,计算 G G G时,从最后的时间步开始往前计算,这是为了节省计算量
- Reward-to-go:即折扣因子 γ = 1 \gamma=1 γ=1, G t = R ^ t = r t + r t + 1 + … + r T G_t=\hat{R}_t=r_t+r_{t+1}+\ldots+r_T Gt=R^t=rt+rt+1+…+rT, T T T为episode的长度
- 通常为 A ^ t \hat{A}_t A^t引入baseline,以减小方差,提升训练稳定性
A ^ t = R ^ t − V ϕ k \hat{A}_t=\hat{R}_t-V_{\phi_k} A^t=R^t−Vϕk
比较
| / | REINFORCE | VPG |
|---|---|---|
| 价值网络 | 无 | 有 |
| 参数更新 | 每个时间步 | 每个episode |
| 回报 | 有折扣 | 无折扣 |
| 采样轨迹 | 一条 | 多条 |
| baseline | 无 | 有 |

![[杂谈]-快速了解Modbus协议](https://img-blog.csdnimg.cn/5ecd75b6230c42999802d9c44fc56124.webp#pic_center)