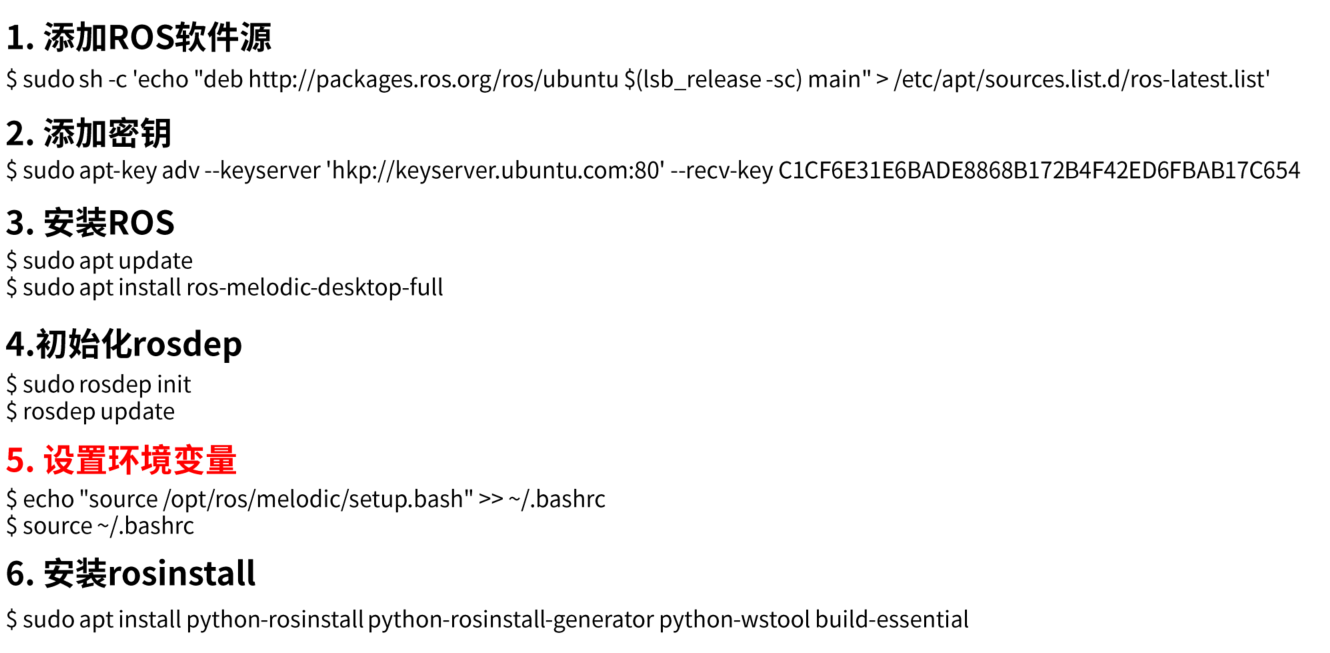
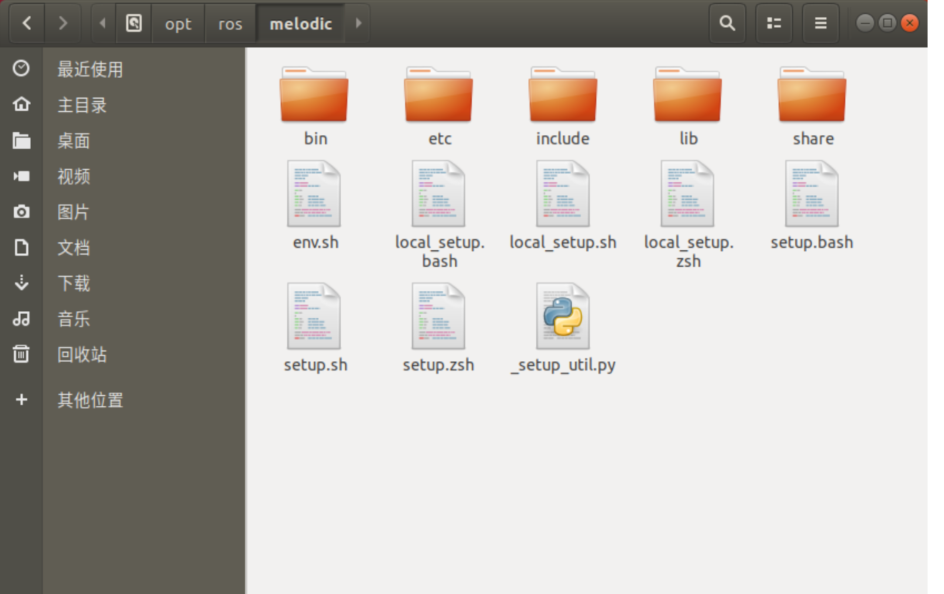
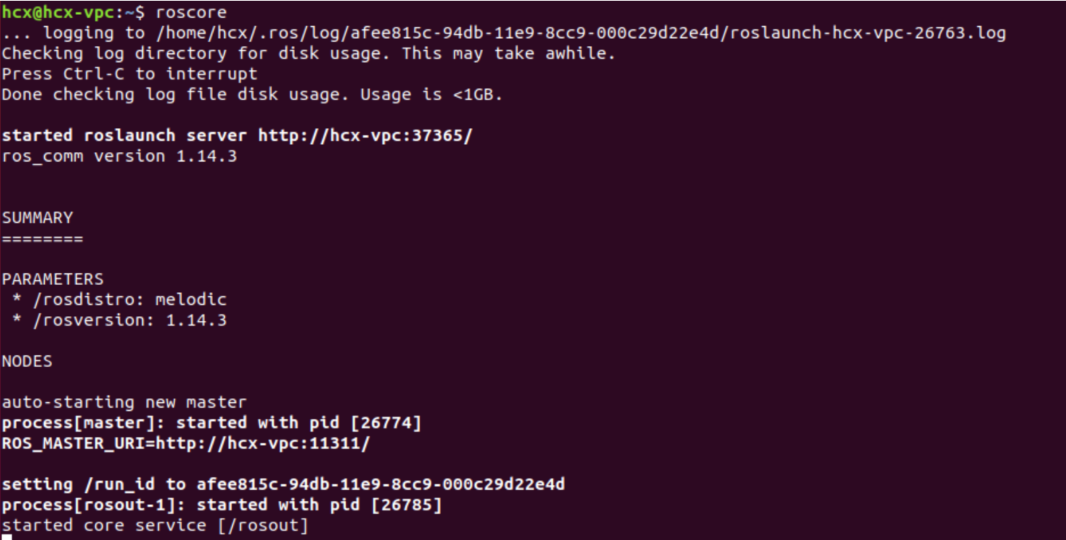
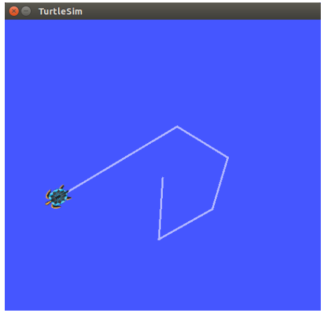
ROS机器人编程---------(一)安装ROS
news2026/2/14 14:13:20
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/965954.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
【李群李代数】Sophus库中SE3类测试(附manif 与sophus 对比)
测试演示 测试结果 对Sophus库中SE3类进行一系列的测试,包括李群性质、原始数据访问、变异访问器、构造函数以及拟合等方面。在每个测试中,都会使用一些预设的数据进行操作,并通过SOPHUS_TEST_APPROX和SOPHUS_TEST_EQUAL等宏来检查操作结果是…

2023应届生java面试搞笑之一:CAS口误说成开心锁-笑坏面试官
源于:XX网,如果冒犯,表示歉意 面试官:什么是CAS 我:这个简单,开心锁 面试官:WTF? 我:一脸自信,对,就是这个 面试官:哈哈大笑ÿ…
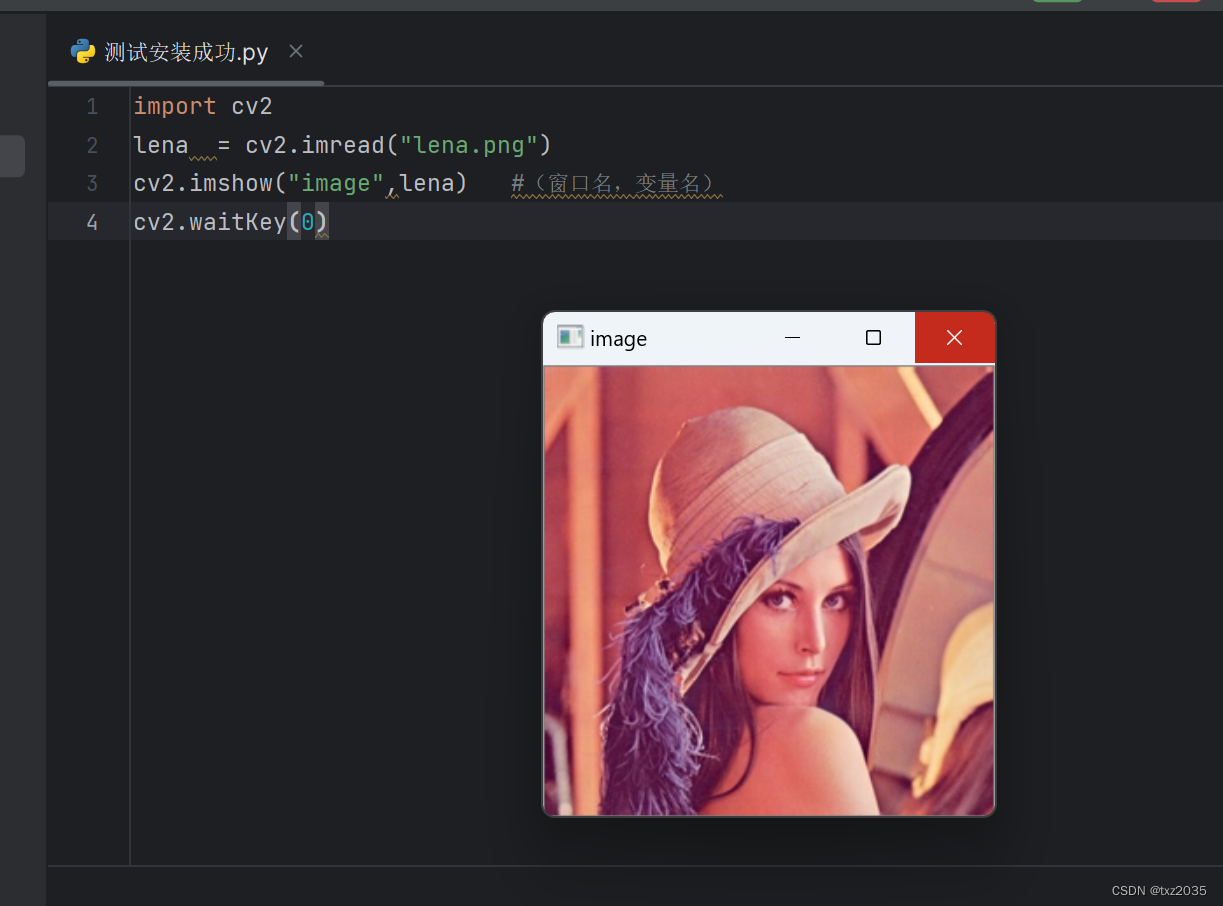
opencv入门-Opencv原理以及Opencv-Python安装
图像的表示
1,位数
计算机采用0/1编码的系统,数字图像也是0/1来记录信息,图像都是8位数图像,包含0~255灰度,
其中0代表最黑,1代表最白 3, 4,OpenCV部署方法
安装OpenCV之前…
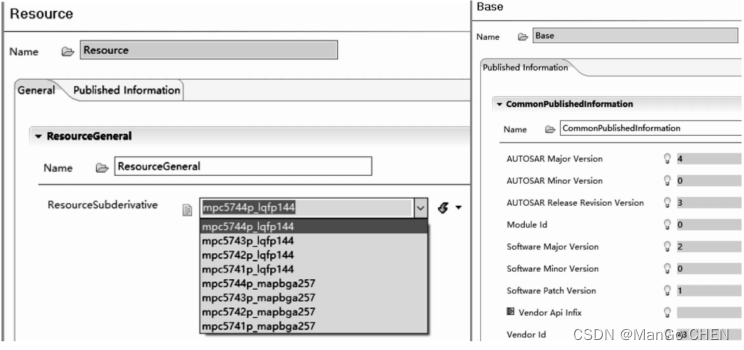
AUTOSAR规范与ECU软件开发(实践篇)7.10MCAL模块配置方法及常用接口函数介绍之Base与Resource的配置
目录 1、前言
2 、Base与Resource模块 1、前言 本例程的硬件平台为MPC5744P开发板,主要配置MPC5744P的mcal的每个模块的配置,如要配置NXP的MCU之S32k324的例程请参考:
2 、Base与Resource模块 Base与Resource这两个模块与具体功能无关&…

什么是 Web 应用程序安全测试?
Web 应用程序安全测试是一种严格的实践,旨在识别、分析和纠正基于 Web 的应用程序中的漏洞。
此过程涉及使用一套全面的工具和方法来评估 Web 应用程序的安全性和完整性。它包括渗透测试、漏洞评估和代码审查等实践。
Web 应用程序安全测试的主要目标是阻止潜在的…

Linux 学习笔记(1)——系统基本配置与开关机命令
目录
0、起步
0-1)命令使用指引
0-2)查看历史的命令记录
0-3)清空窗口内容
0-4)获取本机的内网 IP 地址
0-5)获取本机的公网ip地址
0-6)在window的命令行窗口中远程连接linux
0-7)修改系…
![[Linux]套接字通信](https://img-blog.csdnimg.cn/8f49149f69d44df98f78bff0cdc6beeb.png)
[Linux]套接字通信
摘于https://subingwen.cn,作者:苏丙榅 侵删 文章目录 1. 套接字-socket1.1 概念1.2 网络协议1.3 socket编程1.3.1 字节序1.3.2 IP地址转换1.3.3 sockaddr 数据结构1.3.4 套接字函数 1.4 TCP通信流程1.4.1 服务器端通信流程1.4.2 客户端的通信流程 1.5 扩展阅读1.5.1 初始化套…

Cocos独立游戏开发框架中的日志模块:Bug无所遁形
引言
本系列是《8年主程手把手打造Cocos独立游戏开发框架》,欢迎大家关注分享收藏订阅。
在Cocos独立游戏开发框架中,一个强大的日志模块是不可或缺的组成部分。日志不仅仅是记录应用程序的运行状态,还可以用于故障排除、性能监测和安全审计…
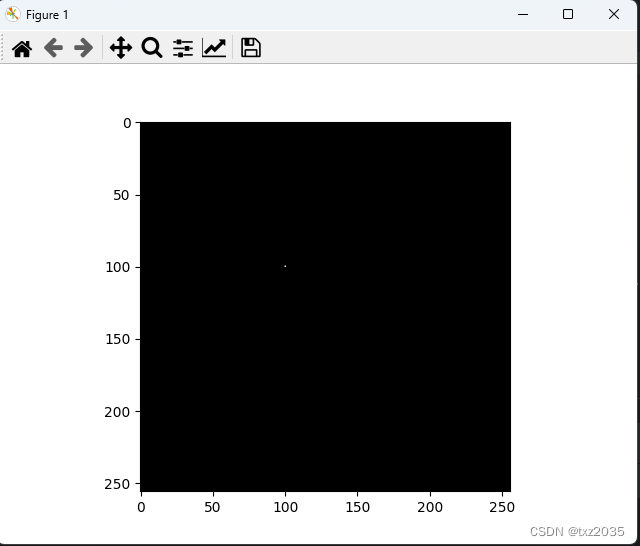
获取并修改图像中的像素点
实现原理
我们可以通过行和列的坐标值获取该像素点的像素值。对于BGR图像,它返回一个蓝,绿,红值的数组。对于灰度图像,仅返回相应的强度值。使用相同的方法对像素值进行修改。
import numpy as np
import cv2 as cv
import matp…

Python语音识别处理详解
概要
人们对智能语音助手的需求不断提高,语音识别技术也随之迅速发展。在这篇文章中,我们将介绍如何使用Python的SpeechRecognition和pydub等库来实现语音识别和处理,从而打造属于自己的智能语音助手。 1. 什么是语音识别?
语音…
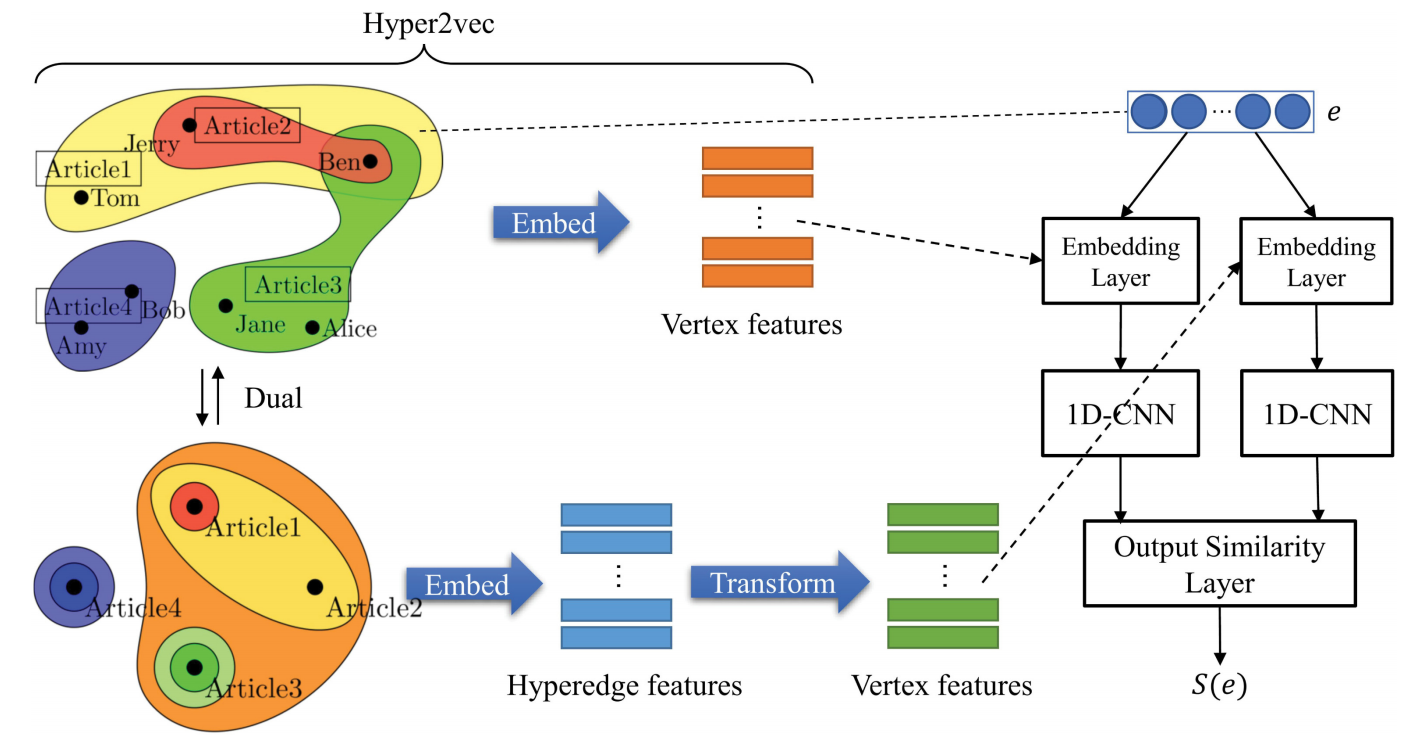
超图嵌入论文阅读1:对偶机制非均匀超网络嵌入
超图嵌入论文阅读1:对偶机制非均匀超网络嵌入 原文:Nonuniform Hyper-Network Embedding with Dual Mechanism ——TOIS(一区 CCF-A) 背景
超边:每条边可以连接不确定数量的顶点
我们关注超网络的两个属性࿱…

【Locomotor运动模块】瞬移
文章目录 一、原理二、两种类型1、Instant(立刻)2、Dash(猛冲) 三、瞬移区域、瞬移点1、瞬移区域2、瞬移点 一、原理
抛物线指针选择好目标位置,然后告诉瞬移预设体:你想法把游戏区域弄到目标位置来 解释:抛物线指针选…
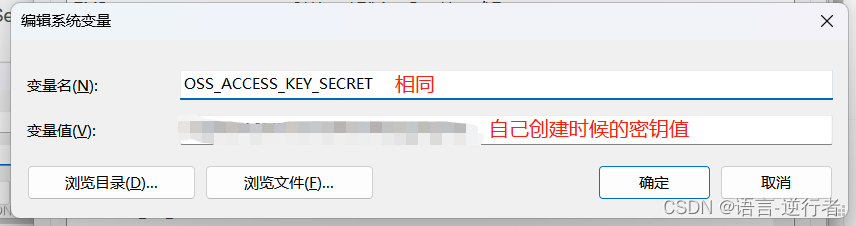
阿里云对象存储oss-文件上传过程详解(两种方式)
阿里云对象存储oss-文件上传过程详解{两种方式} 方式一(最新代码,时间:2023/8/27)(1)如何配置系统变量(2)完整代码 方式二(跟黑马最新教程同代码)(1)在复制下来的代码中(2)完整代码 方式一(最新代码,时间:2023/8/27) 问题:需要配置系统变量才能够使用 (1)如何配置系统变量 以wi…
wxWidgets从空项目开始Hello World
前文回顾
接上篇,已经是在CodeBlocks20.03配置了wxWidgets3.0.5,并且能够通过项目创建导航创建一个新的工程,并且成功运行。
那么上一个是通过CodeBlocks的模板创建的,一进去就已经是2个头文件2个cpp文件,总是感觉缺…
网络安全(黑客)自学路线,了解什么是黑客
谈起黑客,可能各位都会想到:盗号,其实不尽然;黑客是一群喜爱研究技术的群体,在黑客圈中,一般分为三大圈:娱乐圈 技术圈 职业圈。 娱乐圈:主要是初中生和高中生较多,玩网恋…
C++ struct 笔记(超级详细)
今日碎碎念:我在学C语言时经常用到结构体struct,之后在写C程序时遇到在struct中定义构造函数和成员函数的情况,这在c语言中是从未遇到过的,觉得奇怪,想到之前并没有真正系统学习C里的struct,有必要今天详细…

7.6 递归求学生年龄
有5个学生坐在一起,问第五个学生多少岁,他说比第四个学生大两岁。问第四个学生的岁数,他说比第三个学生大2岁。问第三个学生,又说比第二个学生大2岁。问第二个学生,说比第一个学生大2岁。最后问第一个学生,…
Unity中Shader的遮罩的实现
文章目录 前言一、遮罩效果的实现主要是使用对应的纹理实现的,在属性中暴露对应的遮罩纹理,对其进行采样后,最后相乘输出即可二、如果需要像和主要纹理一样流动,则需要使用和_Time篇一样的方法实现流动即可 前言
Unity中Shader的…
TBOX开发需求说明
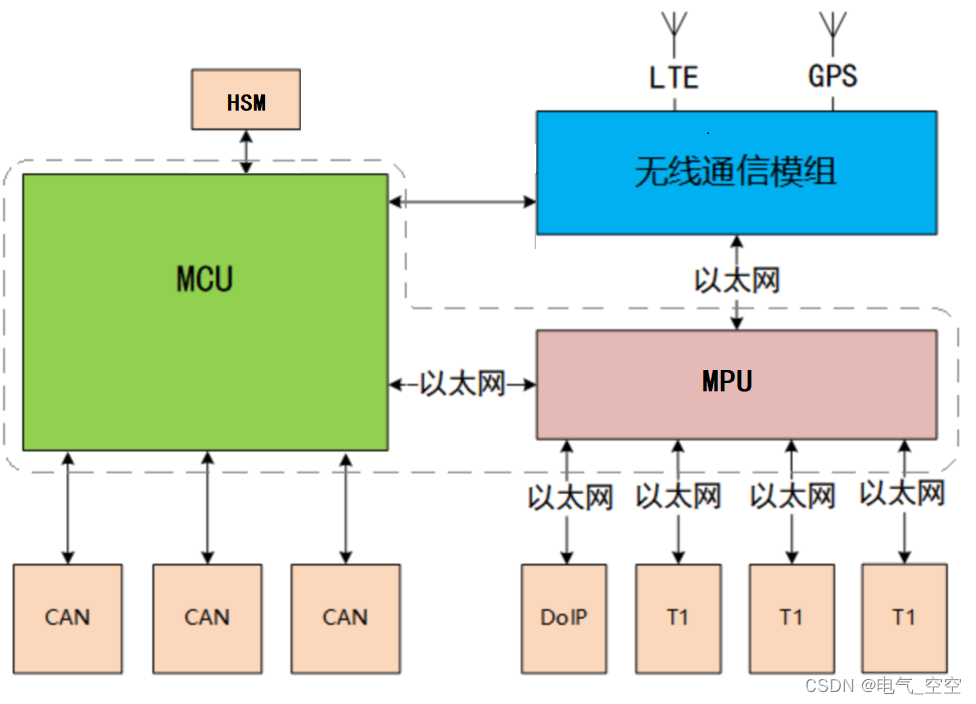
TBOX功能需求:
支持4G上网功能,可获取外网IP,可和云端平台连通支持路由功能,支持计算平台、网关和云端平台建立网络连接支持USB转网口,智能座舱会通过USB连接AG35建立网络连接(类似IVI通过USB口连接TBOX&a…

AAC处理码流分析工具(三十六)
简介: CSDN博客专家,专注Android/Linux系统,分享多mic语音方案、音视频、编解码等技术,与大家一起成长! 优质专栏:Audio工程师进阶系列【原创干货持续更新中……】🚀 人生格言: 人生从来没有捷径,只有行动才是治疗恐惧和懒惰的唯一良药. 更多原创,欢迎关注:Android…