测试新唐nuc980串口功能的过程,如下:
1. 直接下载使用官方的ubuntu系统。
2. 直接使用官方的文件,在家目录下 NUC970_Buildroot 目录下或者自己git clone NUC970_Buildroot 工程也可以,克隆地址如下:
git clone https://github.com/OpenNuvoton/NUC970_Buildroot
或者
git clone https://gitee.com/OpenNuvoton/NUC970_Buildroot.git3. 查看配置文件 ls configs/* ,会显示当前的配置文件,我们选择输入 make nuvoton_nuc980_iot_defconfig,产生预设的configuration file,预设的configuration 会联网安装U-Boot、Linux Kernel、root file system、toolchain ....... 等常用的工具。如果想修改预设的 configuration ,输入 make menuconfig ,进入配置界面进行配置。
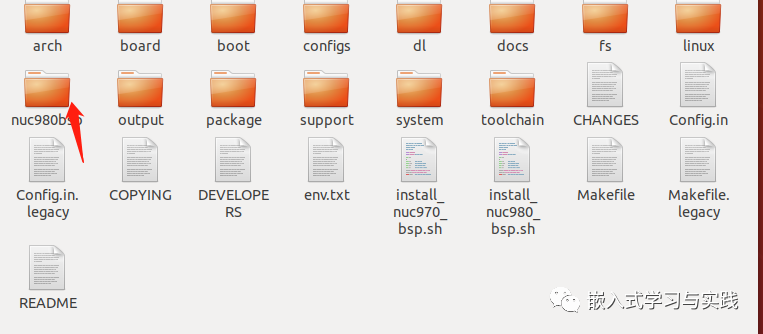
4.输入 make ,开始进行 Compile ,成功后 NUC980 BSP 相关的文件就会出现在NUC970_Buildroot目录下面的output 这个子目录。如下:

5. NUC970_Buildroot 文件夹下输入 sudo ./install_nuc980_bsp.sh ,安装下载nuc980bsp包。执行完脚本,会出现 nuc980bsp 文件夹。
6. 自行编译nuc980bsp包中的测试例程uart的demo,或者按照如下代码编写即可。编译uart 文件,将生成的可执行文件uart_demo,复制到NUC970_Buildroot/output/target/usr/bin。
/****************************************************************************
* *
* Copyright (c) 2014 Nuvoton Technology Corp. All rights reserved. *
* *
****************************************************************************/
/****************************************************************************
*
* FILENAME
* uart_test.c
*
* VERSION
* 1.0
*
* DESCRIPTION
* This is the test program used to test the UARTs on NUC980 EV board
*
* DATA STRUCTURES
* None
*
* FUNCTIONS
* None
*
* HISTORY
*
*
* REMARK
* None
****************************************************************************/
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <termios.h>
#include <errno.h>
#include <string.h>
#include <signal.h>
#include <pthread.h>
#define FALSE 0
#define TRUE 1
int fd[2];
pthread_t threads[10];
char buff[101];
static struct termios newtios,oldtios; /*termianal settings */
static int saved_portfd=-1; /*serial port fd */
static void reset_tty_atexit(void)
{
if(saved_portfd != -1)
{
tcsetattr(saved_portfd,TCSANOW,&oldtios);
}
}
/*cheanup signal handler */
static void reset_tty_handler(int signal)
{
if(saved_portfd != -1)
{
tcsetattr(saved_portfd,TCSANOW,&oldtios);
}
_exit(EXIT_FAILURE);
}
static int open_port(const char *portname)
{
struct sigaction sa;
int portfd;
printf("opening serial port:%s\n",portname);
/*open serial port */
if((portfd=open(portname,O_RDWR | O_NOCTTY)) < 0 )
{
printf("open serial port %s fail \n ",portname);
return portfd;
}
/*get serial port parnms,save away */
tcgetattr(portfd,&newtios);
memcpy(&oldtios,&newtios,sizeof newtios);
/* configure new values */
cfmakeraw(&newtios); /*see man page */
newtios.c_iflag |=IGNPAR; /*ignore parity on input */
newtios.c_oflag &= ~(OPOST | ONLCR | OLCUC | OCRNL | ONOCR | ONLRET | OFILL);
newtios.c_cflag = CS8 | CLOCAL | CREAD;
newtios.c_cc[VMIN]=1; /* block until 1 char received */
newtios.c_cc[VTIME]=0; /*no inter-character timer */
/* 115200 bps */
cfsetospeed(&newtios,B115200);
cfsetispeed(&newtios,B115200);
/* register cleanup stuff */
atexit(reset_tty_atexit);
memset(&sa,0,sizeof sa);
sa.sa_handler = reset_tty_handler;
sigaction(SIGHUP,&sa,NULL);
sigaction(SIGINT,&sa,NULL);
sigaction(SIGPIPE,&sa,NULL);
sigaction(SIGTERM,&sa,NULL);
/*apply modified termios */
saved_portfd=portfd;
tcflush(portfd,TCIFLUSH);
tcsetattr(portfd,TCSADRAIN,&newtios);
return portfd;
}
void * process1(void* arg)
{
int portfd = (int) arg;
unsigned char i, j;
int rev1, rev2;
char RxBuffer[101];
rev1 =0;
rev2 =0;
while(rev2 < 100)
{
rev1 = write(portfd,(buff+rev2),100);
rev2 += rev1;
}
printf("\n uart1 send %d byts\n", rev2);
rev1 = 0;
rev2 = 0;
while(rev2 < 100)
{
rev1 = read(portfd,(RxBuffer+rev2),100);
rev2 += rev1;
}
printf("\n uart1 receive %d bytes\n", rev2);
for(i = 0; i < 100; i++)
{
if(i != RxBuffer[i])
{
printf("\n uart1 compare Error!!");
while(1);
}
}
printf("\n uart1 compare correct!!\n");
printf("\n uart1 test done!!\n");
}
void * process2(void* arg)
{
int portfd = (int) arg;
unsigned char i, j;
int rev1, rev2;
char RxBuffer[101];
rev1 =0;
rev2 =0;
while(rev2 < 100)
{
rev1 = write(portfd,(buff+rev2),100);
rev2 += rev1;
}
printf("\n uart2 send %d bytes \n", rev2);
rev1 = 0;
rev2 = 0;
while(rev2 < 100)
{
rev1 = read(portfd,(RxBuffer+rev2),100);
rev2 += rev1;
}
printf("\n uart2 receive %d bytes \n", rev2);
for(i = 0; i < 100; i++)
{
if(i != RxBuffer[i])
{
printf("\n uart2 compare Error!!");
while(1);
}
}
printf("\n uart2 compare correct!!\n");
printf("\n uart2 test done!!\n");
}
/**
*@breif main()
*/
int main(int argc, char **argv)
{
char *dev[10]={"/dev/ttyS1", "/dev/ttyS2"};
unsigned int i;
printf("\n demo uart1/uart2 external loop back function \n");
for(i = 0; i < 100; i++)
{
buff[i] = (i & 0xff);
}
for(i = 0; i < 2; i++)
{
if((fd[i] = open_port(dev[i]))<0)
return -1;
}
pthread_create(&threads[0], NULL, process1, (void*)(fd[0]));
pthread_create(&threads[1], NULL, process2, (void*)(fd[1]));
pthread_join(threads[0], NULL);
pthread_join(threads[1], NULL);
return 0;
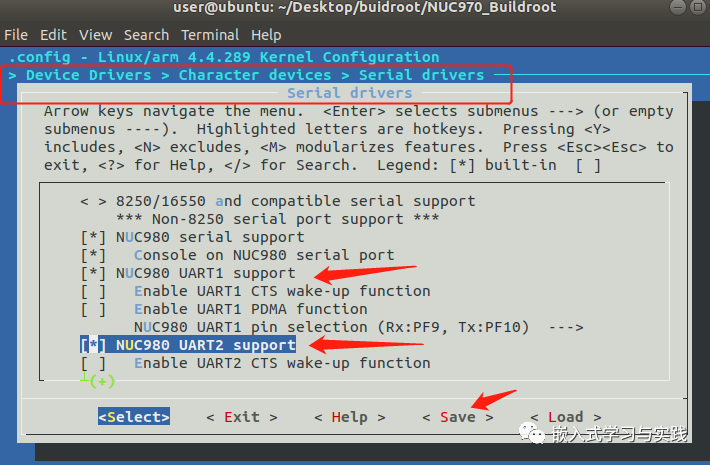
}7. 再NUC970_Buildroot 执行 make linux-menuconfig,打开串口1和串口2的驱动使能,保存后退出。
8.输入 make 编译。
9.编译完之后,拷贝相关文件,共四个文件
拷贝 NUC970_Buildroot/output/images 文件夹下的 uImage 文件;
拷贝 NUC970_Buildroot/output/build/uboot-master 文件夹下的u-boot.bin 文件 ;
拷贝 NUC970_Buildroot/output/build/uboot-master/spl 文件夹下的u-boot-spl.bin 文件;
拷贝 NUC970_Buildroot 文件夹下的 env.txt 文件。这里在 NUC970_Buildroot 文件夹下 未发现env.txt,从别的地方拷贝一份即可。env.txt的内容如下:
baudrate=115200
bootdelay=1
stderr=serial
stdin=serial
stdout=serial
setspi=sf probe 0 30000000
loadkernel=sf read 0x7fc0 0x200000 0x800000
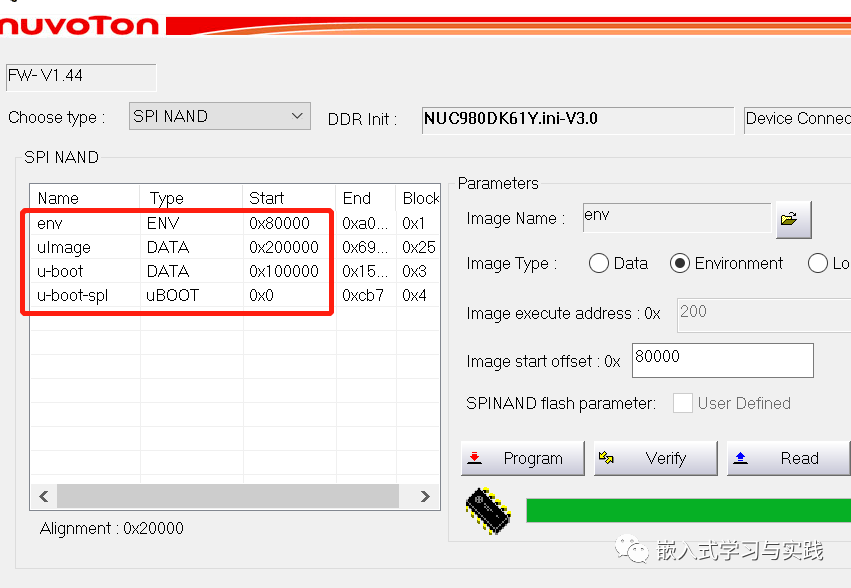
bootcmd=run setspi;run loadkernel;bootm 0x7fc010.选择boot启动方式,上电进行镜像下载,(参考:新唐Nuc980学习笔记1 - 工程创建和下载)
u-boot-spl.bin 选择Loader 默认Image execute address:0x 200 ;下载即可
u-boot.bin 选择 Data 下载到 Image start offset: 0x 100000 ; 下载即可
uImage 选择 Data 下载到 Image start offset: 0x 200000 ; 下载即可
env.txt 选择 Environment下载到 Image start offset: 0x 80000 ; 下载即可
11.选择boot启动方式,复位运行(参考:新唐Nuc980学习笔记1 - 工程创建和下载)
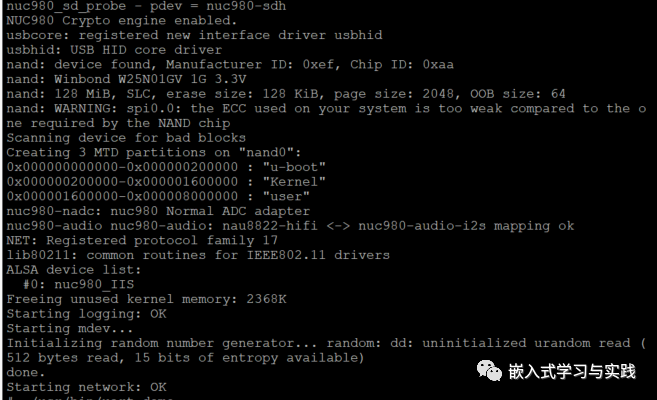
12.开机之后的画面如下:
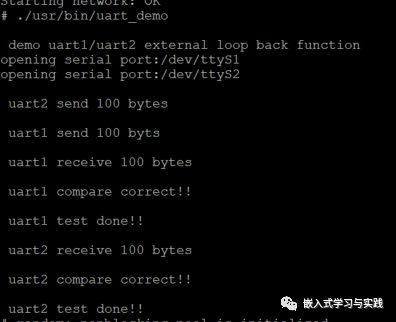
13.输入测试指令 ./usr/bin/uart_demo,可看到串口功能测试符合预期,测试结果如下:
注意:
【 以下动作只需要在更新 Buildroot 工具时使用 】
进入Buildroot 资料夹后请输入以下指令:
git reset --hard
git pull
更新完成后进入 dl 资料夹,先将既有的 linux kernel 与 u-boot 删除,并输入以下指令:
sudo rm -rf linux-master.tar.gz
输入密码 user,并输入以下指令:
sudo rm -rf uboot-master.tar.gz
离开 dl 资料夹,进入 Builroot 资料夹下 make clean。
欢迎关注公众号:嵌入式学习与实践
参考:
https://www.bilibili.com/video/BV1ap4y1W7Za/?spm_id_from=333.999.0.0&vd_source=f58225e38b5a8bc42ab3351918ec20e5
https://www.bilibili.com/video/BV1Df4y1p7Jp/?spm_id_from=333.999.0.0&vd_source=f58225e38b5a8bc42ab3351918ec20e5