PID控制器原理:

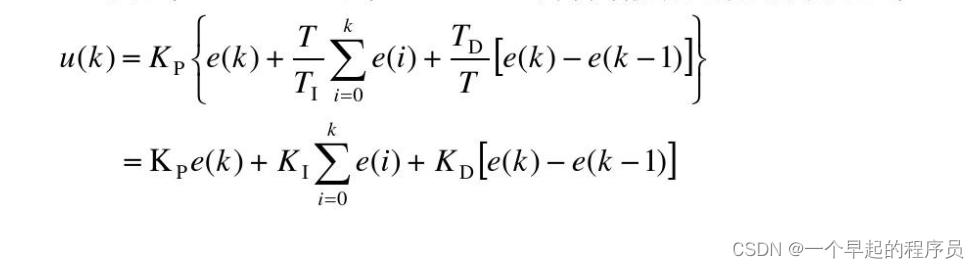
增量式PID:

位置式PID:
什么时候用位置式PID,什么时候用增量式PID:
在设计PID控制器时,应该考虑下什么时候用增量式,什么时候用位置式。需要看控制器输出u与控制目标之间的关系。举个例子:
通过带有调节阀的管路向水箱注水,控制输出u为阀门开度,如果控制目标是注水速度(流量),则采用增量控制,达到目标流量后阀门会保持;如果控制目标是水位,则采用位置式,达到目标水位后阀门会基本处于零位,积分作用下会保持一定开度。
可以看出,当控制输出u,和控制目标是一一对应关系(一定阀门开度对应一定流量)时,采用增量式;当控制输出u,影响的是控制目标的速度(水位变化的速度,即流量)时,采用位置控制。
又比如,通过油门控制车速,也是增量控制,根据期望速度加减油门,速度到了保持住。







![[Go版]算法通关村第十六关青铜——原来滑动窗口如此简单](https://img-blog.csdnimg.cn/ab6c839fd8754563ba4a17d79d86152f.png)