本文来自自动驾驶之心知识星球的国内首个BEV感知全栈系列学习教程
什么是BEV? ----> 上帝视角
- Bird’s-Eye-View,鸟瞰图(俯视图)
- 尺度变化小
(离相机远的尺度比较小,离相机近的尺度比较大,比起前视图比较小) - 遮挡小 (前视图:前后车遮挡问题,但是bev比较小)

- 左为鸟瞰图(俯视图)右为 前视图
什么是感知?
- 是一种响应模式,比如人脑对外界的响应
- 客观世界图在bev视图上面的一种响应
- 学术:利用感知模型,将多传感输入(lidar,carmera)统一到了bev表征
什么是算法?
-
一种数学模型
-
帮助计算机理解不同输入,从而实现不同任务
-
bev感知算法
-
Bird’s-eye-view (BEV) Perception: A Survey and Collection
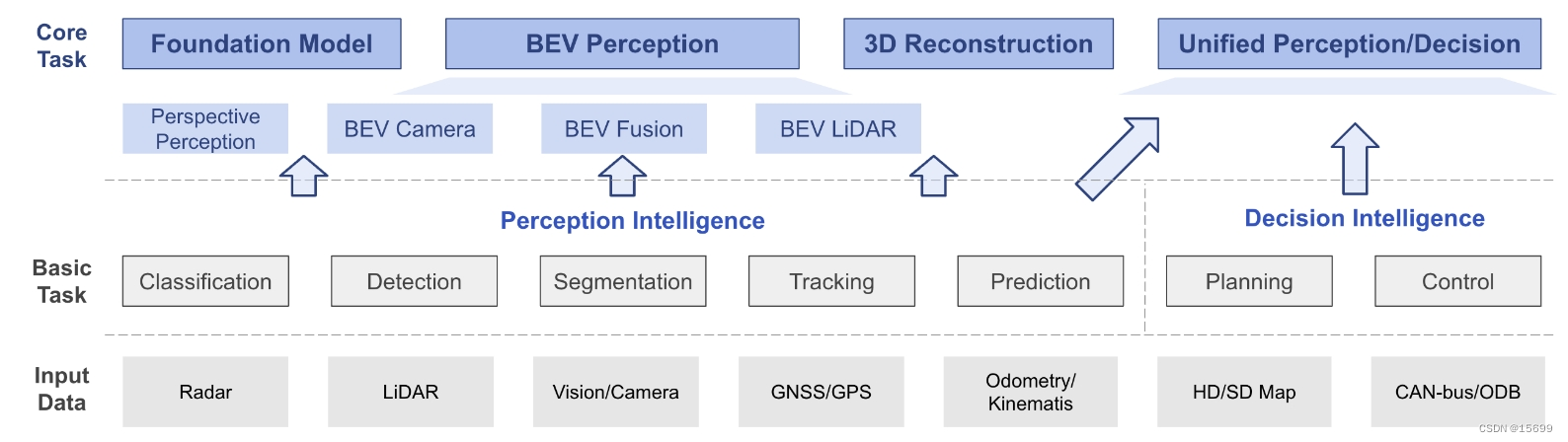
| BEV感知 | BEV感知输入 |
|---|---|
| BEV感知是一个建立在众多子任务上的一个概念 | 包括毫米波雷达、激光雷达点云、相机图像等等 |
| 包括,分类、检测、分割等等 | 依照输入的不同,BEV感知算法有进一步的划分 |
推荐 github
https://github.com/OpenDriveLab/Birds-eye-view-Perception
推荐 博客
https://blog.csdn.net/CV_Autobot?type=blog