代码复现,我能行——系列一
一、基础概念
Dynamic Movement Primitives (DMP),中文为动态运动基元或动态运动原语,由美国University of Southern California的Stefan Schaal教授团队于2002年提出,是一种用于轨迹模仿学习的方法,可以将机械臂末端轨迹建模为一个弹簧阻尼二阶系统,用于轨迹的复现和泛化,避免了机械臂繁琐的手动编程。
二、原作者信息及环境
DMP-MATLAB代码是由MIT大学Dr. Moses开源,作者全名为Moses C. Nah,是韩国奥林匹克金牌获得者,本科在首尔大学,硕博在MIT,很厉害的履历。特别之处,Dr. Moses的导师是Nevil Hogan,也就是阻抗控制的提出者。
代码连接:
https://github.com/mosesnah-shared/DMP-MATLAB
环境:
MATLAB2021以上版本,我使用的是MATLAB R2023a(因为复现这个程序,特意安装了最新版本的MATLAB)
复现本代码需要在MATLAB安装作者开发的Explicit-MATLAB----a MATLAB-based robotic simulator based on differential geometry. 也就是一种基于MATLAB的使用微分几何的机器人模拟器。
Explicit-MATLAB网址:
https://github.com/explicit-robotics/Explicit-MATLAB/tree/e2de82e60f118e1a8fa247367339899c1f510336#authors
三、复现过程
1.首先下载DMP-MATLAB压缩文件,解压到个人存放程序的文件夹
下载链接:https://github.com/mosesnah-shared/DMP-MATLAB
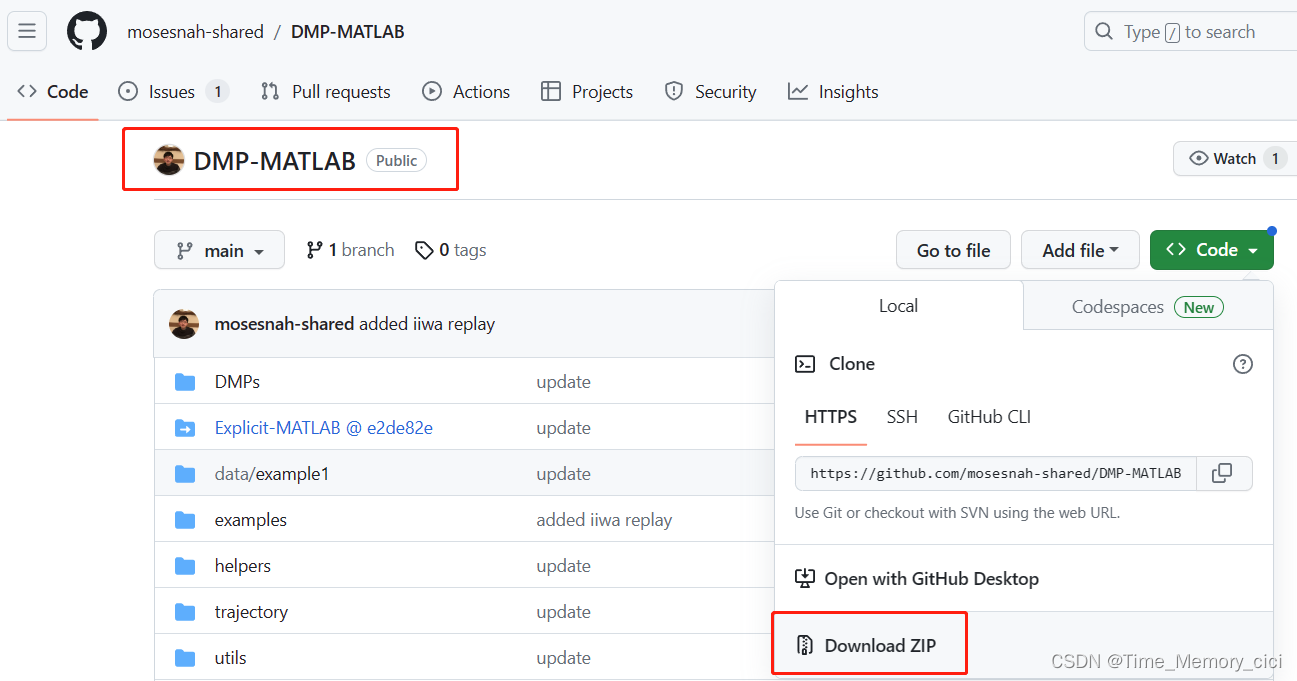
2.下载Explicit-MATLAB模拟器
下载链接:https://github.com/explicit-robotics/Explicit-MATLAB/tree/e2de82e60f118e1a8fa247367339899c1f510336#authors
同样下载ZIP压缩文件,解压到DMP-MATLAB文件夹下,先把该文件夹下原有的Explicit-MATLAB删除,因此之前是空的。
3.在MATLAB安装Explicit-MATLAB模拟器

打开MATLAB R2023a,通过上方菜单栏将当前文件夹设置为Explicit-MATLAB文件夹。运行setup.m脚本以包括所有子文件夹。或者也可以直接在命令行窗口中执行以下命令:
setup
如果命令行窗口中出现以下行,则表示已安装成功!
'EXPlicit (c) Moses C. Nah & Johannes Lachner 2022-2023, https://explicit-robotics.github.io'
4.在MATLAB运行DMP程序
MATLAB导航至DMP-MATLAB的examples文件夹,运行main_IL_iiwa_pos.m程序,中间可能显示路径问题,根据提示进行修改即可,很简单。
四、复现结果展示
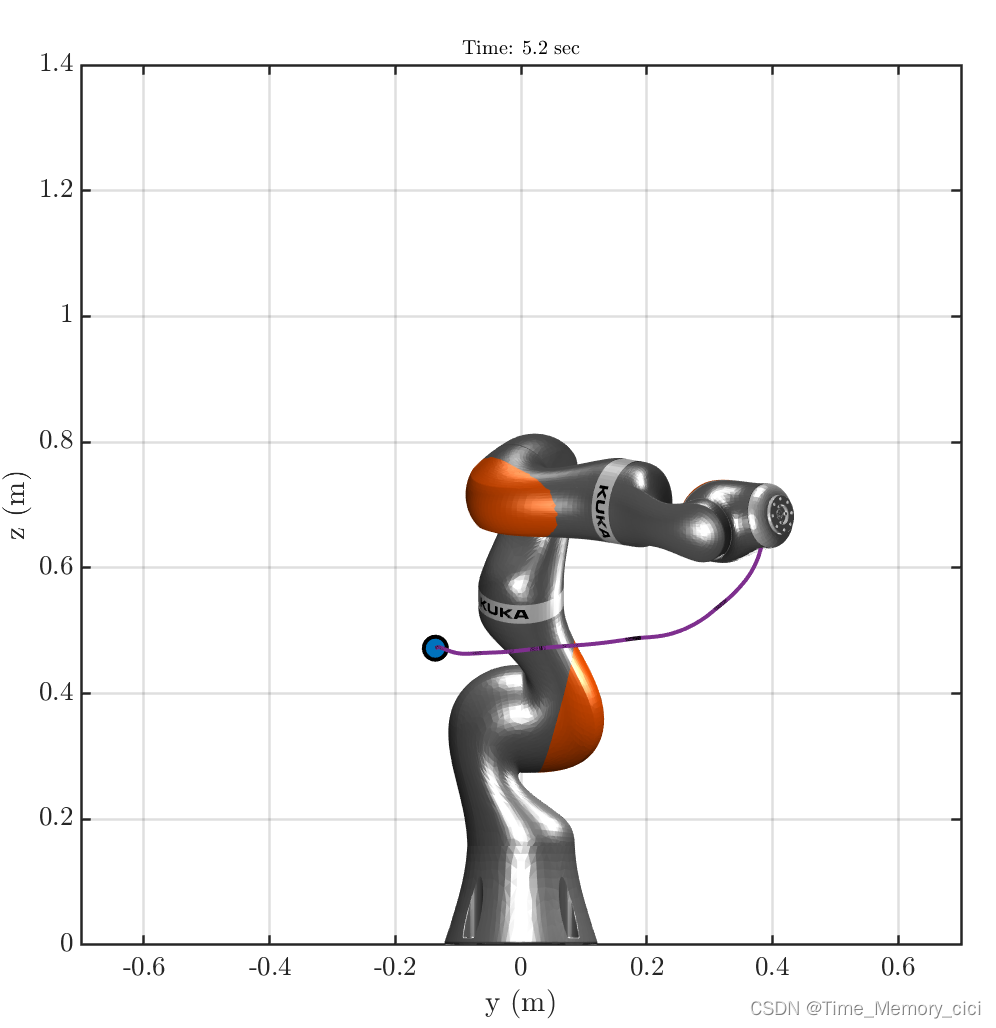
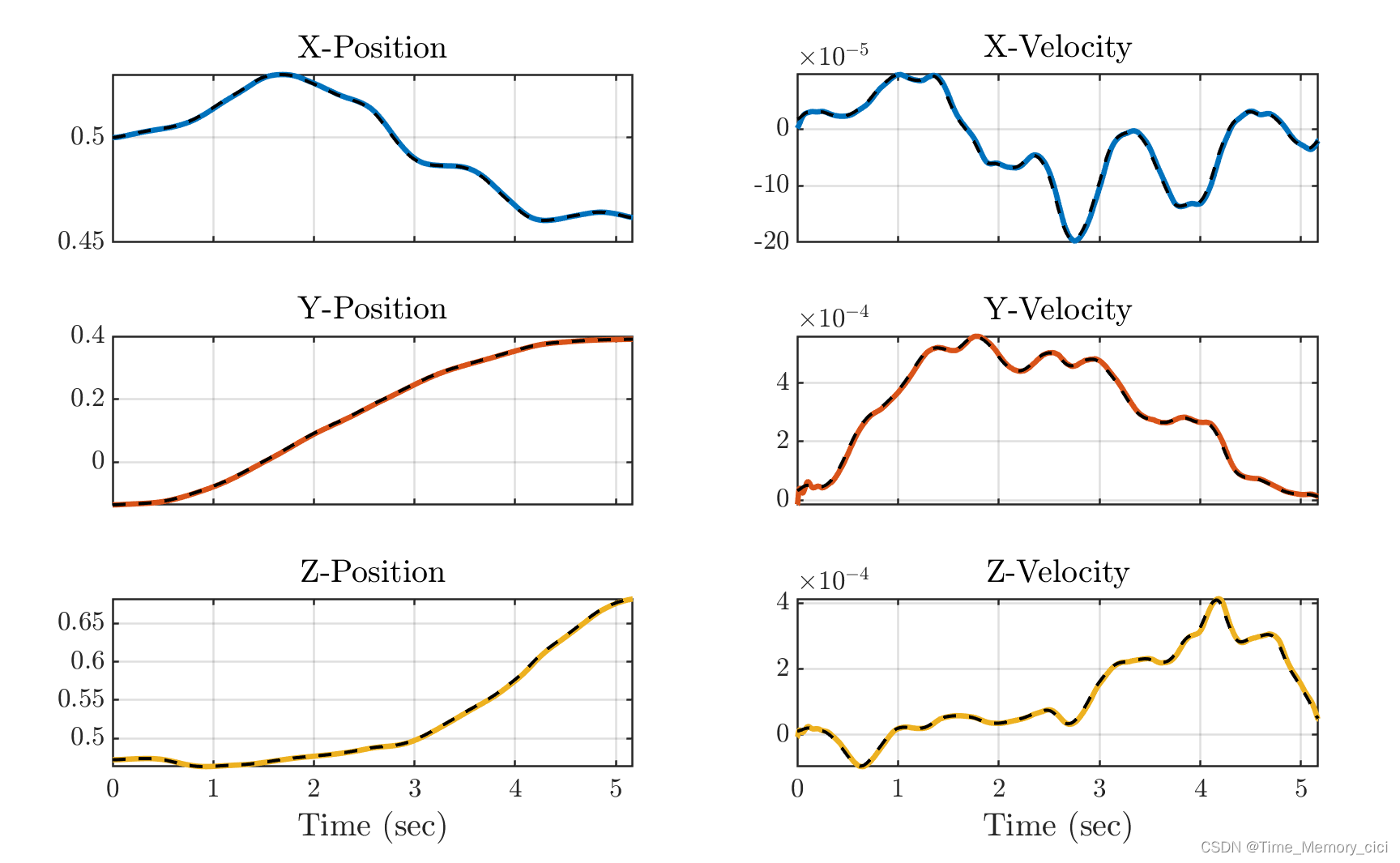
完结,撒花~~