硬件与环境
相机: MV-CS020-10GC
系统:UBUNTU 22.04
语言:C++
工具:cmake
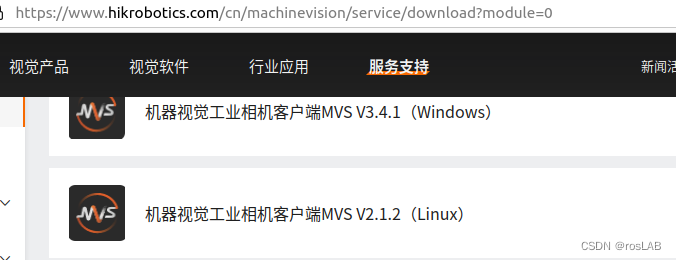
海康官网下载SDK
运行下面的命令进行安装
sudo dpkg -i MVSXXX.deb
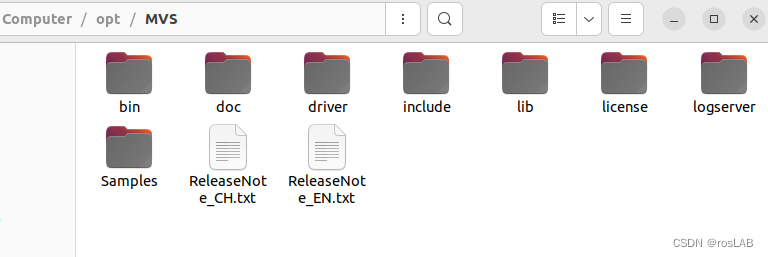
安装完成后从在/opt/MVS 路径下就有了相关的库,实际上我们开发的时候只需要lib和include。有兴趣的同学也可以尝试以下Samples的例子。make一下就能生成可执行文件。如果make报错,可能环境变量没有设置好,到bin文件夹下把那几个设置环境变量的shell脚本运行一下再试一试。
make
这里是我运行了/opt/MVS/Samples/64/Display下的例子。
开发
实际上我们开发的时候只需要目录/opt/MVS/lib和/opt/MVS/include下的文件。他们是海康提供的链接库。所以我们在写程序的时候链接到海康的库,我们就能调用海康官方的接口了。
我将海康的库放在我工程的3rdPartys下,这样就移植到其他电脑上会比较方便。
add_library(
cameraAPI
SHARED
)
# Define preprocessor macro for exporting symbols on Windows
if(WIN32)
target_compile_definitions(cameraAPI PRIVATE cameraAPI_EXPORTS)
endif()
message( target name: cameraAPI )
target_include_directories(
cameraAPI PRIVATE
${OpenCV_INCLUDE_DIRS}
./include
./3rdPartys/mvsinclude
)
target_sources(
cameraAPI PRIVATE
./src/edge_camera.cpp
)
target_link_directories(
cameraAPI PUBLIC
${OpenCV_LIBS}
./3rdPartys/mvslib/64
)
target_link_libraries(
cameraAPI PRIVATE
${OpenCV_LIBS}
MvCameraControl
pthread
)
主要的程序
//
// Created by zc on 8/24/23.
//
#include "edge_camera.h"
EDGE_CAMERA::EDGE_CAMERA() {
std::cout<<"EDGE_CAMERA BEGIN!"<<std::endl;
}
EDGE_CAMERA::~EDGE_CAMERA(){
std::cout<<"EDGE_CAMERA FINISH!"<<std::endl;
}
// print the discovered devices' information
void EDGE_CAMERA::PrintDeviceInfo(MV_CC_DEVICE_INFO* pstMVDevInfo)
{
if (nullptr == pstMVDevInfo)
{
printf(" NULL info.\n\n");
return;
}
if (MV_GIGE_DEVICE == pstMVDevInfo->nTLayerType)
{
unsigned int nIp1 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0xff000000) >> 24);
unsigned int nIp2 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x00ff0000) >> 16);
unsigned int nIp3 = ((pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x0000ff00) >> 8);
unsigned int nIp4 = (pstMVDevInfo->SpecialInfo.stGigEInfo.nCurrentIp & 0x000000ff);
// en:Print current ip and user defined name
printf(" IP: %d.%d.%d.%d\n" , nIp1, nIp2, nIp3, nIp4);
printf(" UserDefinedName: %s\n" , pstMVDevInfo->SpecialInfo.stGigEInfo.chUserDefinedName);
printf(" Device Model Name: %s\n\n", pstMVDevInfo->SpecialInfo.stGigEInfo.chModelName);
}
else if (MV_USB_DEVICE == pstMVDevInfo->nTLayerType)
{
printf(" UserDefinedName: %s\n", pstMVDevInfo->SpecialInfo.stUsb3VInfo.chUserDefinedName);
printf(" Device Model Name: %s\n\n", pstMVDevInfo->SpecialInfo.stUsb3VInfo.chModelName);
}
else
{
printf(" Not support.\n\n");
}
}
// en:Convert pixel arrangement from RGB to BGR
void EDGE_CAMERA::RGB2BGR( unsigned char* pRgbData, unsigned int nWidth, unsigned int nHeight )
{
if ( nullptr == pRgbData )
{
return;
}
// RGB TO BGR
for (unsigned int j = 0; j < nHeight; j++)
{
for (unsigned int i = 0; i < nWidth; i++)
{
unsigned char red = pRgbData[j * (nWidth * 3) + i * 3];
pRgbData[j * (nWidth * 3) + i * 3] = pRgbData[j * (nWidth * 3) + i * 3 + 2];
pRgbData[j * (nWidth * 3) + i * 3 + 2] = red;
}
}
}
// en:Convert data stream to Mat format then save image
bool EDGE_CAMERA::Convert2Mat(MV_FRAME_OUT_INFO_EX *pstImageInfo, unsigned char *pData, cv::Mat &img)
{
if (nullptr == pstImageInfo || nullptr == pData)
{
printf("NULL info or data.\n");
return false;
}
cv::Mat srcImage;
if ( PixelType_Gvsp_Mono8 == pstImageInfo->enPixelType ) // Mono8
{
srcImage = cv::Mat(pstImageInfo->nHeight, pstImageInfo->nWidth, CV_8UC1, pData);
}
else if ( PixelType_Gvsp_RGB8_Packed == pstImageInfo->enPixelType ) // RGB8
{
RGB2BGR(pData, pstImageInfo->nWidth, pstImageInfo->nHeight);
srcImage = cv::Mat(pstImageInfo->nHeight, pstImageInfo->nWidth, CV_8UC3, pData);
}
else if(PixelType_Gvsp_BayerRG8 == pstImageInfo->enPixelType) // BayerRG8
{
printf("pPixelType_Gvsp_BayerRG8 type is converted to Mat\n");
//RGB2BGR(pData, pstImageInfo->nWidth, pstImageInfo->nHeight);
srcImage = cv::Mat(pstImageInfo->nHeight, pstImageInfo->nWidth, CV_8UC1, pData);
// srcImage.create(srcImage.rows,srcImage.cols,CV_8UC3);
cvtColor(srcImage, srcImage, cv::COLOR_BayerRG2RGB);
}
else
{
printf("Unsupported pixel format\n");
return false;
}
if ( nullptr == srcImage.data )
{
printf("Creat Mat failed.\n");
return false;
}
try
{
// en:Save converted image in a local file
img = srcImage;
cv::imwrite("Image_Mat.bmp", srcImage);
}
catch (cv::Exception& ex)
{
fprintf(stderr, "Exception in saving mat image: %s\n", ex.what());
}
srcImage.release();
return true;
}
// en:Convert data stream in Ipl format then save image
bool EDGE_CAMERA::Convert2Ipl(MV_FRAME_OUT_INFO_EX* pstImageInfo, unsigned char * pData)
{
if (nullptr == pstImageInfo || nullptr == pData)
{
printf("NULL info or data.\n");
return false;
}
IplImage* srcImage = nullptr;
if ( PixelType_Gvsp_Mono8 == pstImageInfo->enPixelType ) // Mono8????
{
srcImage = cvCreateImage(cvSize(pstImageInfo->nWidth, pstImageInfo->nHeight), IPL_DEPTH_8U, 1);
}
else if ( PixelType_Gvsp_RGB8_Packed == pstImageInfo->enPixelType ) // RGB8????
{
RGB2BGR(pData, pstImageInfo->nWidth, pstImageInfo->nHeight);
srcImage = cvCreateImage(cvSize(pstImageInfo->nWidth, pstImageInfo->nHeight), IPL_DEPTH_8U, 3);
}
else
{
printf("Unsupported pixel format\n");
return false;
}
if ( nullptr == srcImage )
{
printf("Creat IplImage failed.\n");
return false;
}
srcImage->imageData = (char *)pData;
try
{
// en:Save converted image in a local file
cv::Mat cConvertImage = cv::cvarrToMat(srcImage);
cv::imwrite("Image_Ipl.bmp", cConvertImage);
cConvertImage.release();
}
catch (cv::Exception& ex)
{
fprintf(stderr, "Exception in saving IplImage: %s\n", ex.what());
}
cvReleaseImage(&srcImage);
return true;
}
void EDGE_CAMERA::findCameras(){
int nRet = MV_OK;
//void* handle = nullptr;
//unsigned char * pData = nullptr;
//MV_CC_DEVICE_INFO_LIST _stDeviceList;
memset(&_stDeviceList, 0, sizeof(MV_CC_DEVICE_INFO_LIST));
// en:Enum device
do {
nRet = MV_CC_EnumDevices(MV_GIGE_DEVICE | MV_USB_DEVICE, &_stDeviceList);
if (MV_OK != nRet) {
printf("Enum Devices fail! nRet [0x%x]\n", nRet);
break;
}
// en:Show devices
if (_stDeviceList.nDeviceNum > 0) {
for (unsigned int i = 0; i < _stDeviceList.nDeviceNum; i++) {
printf("[device %d]:\n", i);
MV_CC_DEVICE_INFO *pDeviceInfo = _stDeviceList.pDeviceInfo[i];
if (nullptr == pDeviceInfo) {
break;
}
PrintDeviceInfo(pDeviceInfo);
}
} else {
printf("Find No Devices!\n");
break;
}
}while(false);
}
void EDGE_CAMERA::connectCameras(){
for(int device = 0; device < _stDeviceList.nDeviceNum; device++){
if (!MV_CC_IsDeviceAccessible(_stDeviceList.pDeviceInfo[device], MV_ACCESS_Exclusive))
{
PrintDeviceInfo(_stDeviceList.pDeviceInfo[device]);
printf("Can't connect %u! ", _stDeviceList.pDeviceInfo[device]->nMacAddrLow);
continue;
}else{
void *handle;
PrintDeviceInfo(_stDeviceList.pDeviceInfo[device]);
printf("connect %10u!\n", _stDeviceList.pDeviceInfo[device]->nMacAddrLow);
int nRet = MV_CC_CreateHandle(&handle, _stDeviceList.pDeviceInfo[device]);
_handlesCameraInfos.push_back({handle,nRet}); //save the handle to handlesCameraInfos
if (MV_OK != nRet)
{
printf("Create Handle fail! nRet [0x%x]\n", nRet);
}
}
}
}
void EDGE_CAMERA::initCamera(void *handle, int createRetStatus, unsigned int cameraIndex) {
int nRet;
unsigned char * pData = nullptr;
do{
if (createRetStatus != MV_OK)
break;
handle = handle;
// en:Open device
nRet = MV_CC_OpenDevice(handle);
if (MV_OK != nRet) {
printf("Open Device fail! nRet [0x%x]\n", nRet);
break;
}
// en:Detection network optimal package size(It only works for the GigE camera)
if (MV_GIGE_DEVICE == _stDeviceList.pDeviceInfo[cameraIndex]->nTLayerType) {
int nPacketSize = MV_CC_GetOptimalPacketSize(handle);
if (nPacketSize > 0) {
nRet = MV_CC_SetIntValue(handle, "GevSCPSPacketSize", nPacketSize);
if (MV_OK != nRet) {
printf("Warning: Set Packet Size fail! nRet [0x%x]!", nRet);
}
} else {
printf("Warning: Get Packet Size fail! nRet [0x%x]!", nPacketSize);
}
}
//en:Set trigger mode as off
nRet = MV_CC_SetEnumValue(handle, "TriggerMode", 0);
if (MV_OK != nRet) {
printf("Set Trigger Mode fail! nRet [0x%x]\n", nRet);
break;
}
// en:Get payload size
MVCC_INTVALUE stParam;
memset(&stParam, 0, sizeof(MVCC_INTVALUE));
nRet = MV_CC_GetIntValue(handle, "PayloadSize", &stParam);
if (MV_OK != nRet) {
printf("Get PayloadSize fail! nRet [0x%x]\n", nRet);
break;
}
unsigned int nPayloadSize = stParam.nCurValue;
// en:Init image info
MV_FRAME_OUT_INFO_EX stImageInfo = {0};
memset(&stImageInfo, 0, sizeof(MV_FRAME_OUT_INFO_EX));
pData = (unsigned char *) malloc(sizeof(unsigned char) * (nPayloadSize));
if (nullptr == pData) {
printf("Allocate memory failed.\n");
break;
}
memset(pData, 0, sizeof(pData));
// en:Start grab image
nRet = MV_CC_StartGrabbing(handle);
if (MV_OK != nRet) {
printf("Start Grabbing fail! nRet [0x%x]\n", nRet);
break;
}
_camerasDatas.push_back({handle,pData,nPayloadSize,stImageInfo});
// en:Get one frame from camera with timeout=1000ms
/* while (true) {
nRet = MV_CC_GetOneFrameTimeout(handle, pData, nPayloadSize, &stImageInfo, 1000);
if (MV_OK == nRet) {
printf("Get One Frame: Width[%d], Height[%d], FrameNum[%d]\n",
stImageInfo.nWidth, stImageInfo.nHeight, stImageInfo.nFrameNum);
} else {
printf("Get Frame fail! nRet [0x%x]\n", nRet);
break;
}
// en:Convert image data
bool bConvertRet = false;
cv::Mat img;
bConvertRet = Convert2Mat(&stImageInfo, pData, img);
cv::namedWindow("img", cv::WINDOW_NORMAL);
cv::resizeWindow("img", cv::Size(900, 600));
imshow("img", img);
cv::waitKey(20);
}*/
}while(false);
/* // en:Stop grab image
nRet = MV_CC_StopGrabbing(handle);
if (MV_OK != nRet)
{
printf("Stop Grabbing fail! nRet [0x%x]\n", nRet);
break;
}
// en:Close device
nRet = MV_CC_CloseDevice(handle);
if (MV_OK != nRet)
{
printf("ClosDevice fail! nRet [0x%x]\n", nRet);
break;
}
// en:Input the format to convert
printf("\n[0] OpenCV_Mat\n");
printf("[1] OpenCV_IplImage\n");
int nFormat = 0;*/
}
void EDGE_CAMERA::initAllCameras(){
unsigned int nCameraIndex = _handlesCameraInfos.size();
unsigned int cameraIndex = 0;
for(auto handlesCameraInfo:_handlesCameraInfos){
initCamera(handlesCameraInfo.handle, handlesCameraInfo.createRetStatus, cameraIndex);
cameraIndex++;
}
}
void EDGE_CAMERA::disPlay() {
//initCamera(_handlesCameraInfos[0].handle, _handlesCameraInfos[0].createRetStatus, 0);
std::string winName = "img";
cv::namedWindow(winName, cv::WINDOW_NORMAL);
cv::resizeWindow(winName, cv::Size(900, 600));
while (cv::waitKey(50) != 'q') {
unsigned int cameraIndex = 0;
int nRet = MV_CC_GetOneFrameTimeout(_camerasDatas[0].handle, _camerasDatas[0].pData, _camerasDatas[0].nPayloadSize, &_camerasDatas[0].stImageInfo, 1000);
if (MV_OK == nRet) {
printf("Get One Frame: Width[%d], Height[%d], FrameNum[%d]\n",
_camerasDatas[0].stImageInfo.nWidth, _camerasDatas[0].stImageInfo.nHeight, _camerasDatas[0].stImageInfo.nFrameNum);
} else {
printf("Get Frame fail! nRet [0x%x]\n", nRet);
break;
}
// en:Convert image data
bool bConvertRet = false;
cv::Mat img;
bConvertRet = Convert2Mat(&_camerasDatas[0].stImageInfo, _camerasDatas[0].pData, img);
imshow(winName, img);
cv::waitKey(20);
}
}
bool EDGE_CAMERA::getAndProcessImg() {
int nRet = MV_OK;
void* handle = nullptr;
unsigned char * pData = nullptr;
do
{
MV_CC_DEVICE_INFO_LIST stDeviceList;
memset(&stDeviceList, 0, sizeof(MV_CC_DEVICE_INFO_LIST));
// en:Enum device
nRet = MV_CC_EnumDevices(MV_GIGE_DEVICE | MV_USB_DEVICE, &stDeviceList);
if (MV_OK != nRet)
{
printf("Enum Devices fail! nRet [0x%x]\n", nRet);
break;
}
// en:Show devices
if (stDeviceList.nDeviceNum > 0)
{
for (unsigned int i = 0; i < stDeviceList.nDeviceNum; i++)
{
printf("[device %d]:\n", i);
MV_CC_DEVICE_INFO* pDeviceInfo = stDeviceList.pDeviceInfo[i];
if (nullptr == pDeviceInfo)
{
break;
}
PrintDeviceInfo(pDeviceInfo);
}
}
else
{
printf("Find No Devices!\n");
break;
}
// en:Select device
unsigned int nIndex = 0;
while (true)
{
printf("Please Input camera index(0-%d): ", stDeviceList.nDeviceNum - 1);
if (1 == scanf("%d", &nIndex))
{
while (getchar() != '\n')
{
;
}
if (nIndex >= 0 && nIndex < stDeviceList.nDeviceNum)
{
if (!MV_CC_IsDeviceAccessible(stDeviceList.pDeviceInfo[nIndex], MV_ACCESS_Exclusive))
{
printf("Can't connect! ");
continue;
}
break;
}
}
else
{
while (getchar() != '\n')
{
;
}
}
}
// en:Create handle
nRet = MV_CC_CreateHandle(&handle, stDeviceList.pDeviceInfo[nIndex]);
if (MV_OK != nRet)
{
printf("Create Handle fail! nRet [0x%x]\n", nRet);
break;
}
// en:Open device
nRet = MV_CC_OpenDevice(handle);
if (MV_OK != nRet)
{
printf("Open Device fail! nRet [0x%x]\n", nRet);
break;
}
// en:Detection network optimal package size(It only works for the GigE camera)
if (MV_GIGE_DEVICE == stDeviceList.pDeviceInfo[nIndex]->nTLayerType)
{
int nPacketSize = MV_CC_GetOptimalPacketSize(handle);
if (nPacketSize > 0)
{
nRet = MV_CC_SetIntValue(handle, "GevSCPSPacketSize", nPacketSize);
if (MV_OK != nRet)
{
printf("Warning: Set Packet Size fail! nRet [0x%x]!", nRet);
}
}
else
{
printf("Warning: Get Packet Size fail! nRet [0x%x]!", nPacketSize);
}
}
//en:Set trigger mode as off
nRet = MV_CC_SetEnumValue(handle, "TriggerMode", 0);
if (MV_OK != nRet)
{
printf("Set Trigger Mode fail! nRet [0x%x]\n", nRet);
break;
}
// en:Get payload size
MVCC_INTVALUE stParam;
memset(&stParam, 0, sizeof(MVCC_INTVALUE));
nRet = MV_CC_GetIntValue(handle, "PayloadSize", &stParam);
if (MV_OK != nRet)
{
printf("Get PayloadSize fail! nRet [0x%x]\n", nRet);
break;
}
unsigned int nPayloadSize = stParam.nCurValue;
// en:Init image info
MV_FRAME_OUT_INFO_EX stImageInfo = { 0 };
memset(&stImageInfo, 0, sizeof(MV_FRAME_OUT_INFO_EX));
pData = (unsigned char *)malloc(sizeof(unsigned char)* (nPayloadSize));
if (nullptr == pData)
{
printf("Allocate memory failed.\n");
break;
}
memset(pData, 0, sizeof(pData));
// en:Start grab image
nRet = MV_CC_StartGrabbing(handle);
if (MV_OK != nRet)
{
printf("Start Grabbing fail! nRet [0x%x]\n", nRet);
break;
}
// en:Get one frame from camera with timeout=1000ms
nRet = MV_CC_GetOneFrameTimeout(handle, pData, nPayloadSize, &stImageInfo, 1000);
if (MV_OK == nRet)
{
printf("Get One Frame: Width[%d], Height[%d], FrameNum[%d]\n",
stImageInfo.nWidth, stImageInfo.nHeight, stImageInfo.nFrameNum);
}
else
{
printf("Get Frame fail! nRet [0x%x]\n", nRet);
break;
}
// en:Stop grab image
nRet = MV_CC_StopGrabbing(handle);
if (MV_OK != nRet)
{
printf("Stop Grabbing fail! nRet [0x%x]\n", nRet);
break;
}
// en:Close device
nRet = MV_CC_CloseDevice(handle);
if (MV_OK != nRet)
{
printf("ClosDevice fail! nRet [0x%x]\n", nRet);
break;
}
// en:Input the format to convert
printf("\n[0] OpenCV_Mat\n");
printf("[1] OpenCV_IplImage\n");
int nFormat = 0;
while (1)
{
printf("Please Input Format to convert: ");
if (1 == scanf("%d", &nFormat))
{
if (0 == nFormat || 1 == nFormat)
{
break;
}
}
while (getchar() != '\n')
{
;
}
}
// en:Convert image data
bool bConvertRet = false;
cv::Mat img;
if (OpenCV_Mat == nFormat)
{
bConvertRet = Convert2Mat(&stImageInfo, pData, img);
}
else if (OpenCV_IplImage == nFormat)
{
bConvertRet = Convert2Ipl(&stImageInfo, pData);
}
// en:Print result
if (bConvertRet)
{
printf("OpenCV format convert finished.\n");
}
else
{
printf("OpenCV format convert failed.\n");
}
} while (0);
// en:Destroy handle
if (handle)
{
MV_CC_DestroyHandle(handle);
handle = nullptr;
}
// en:Free memery
if (pData)
{
free(pData);
pData = nullptr;
}
return true;
}
void EDGE_CAMERA::saveImg(std::string path,unsigned int cameraIndex){
}
Main函数
int main(int argc, char **argv){
EDGE_CAMERA camera;
camera.findCameras();
camera.connectCameras();
camera.initAllCameras();
camera.disPlay();
}
执行效果
注意
我是编译了一个动态库cameraAPI,main函数是链接的camkeraAPI。上面是把最重要的代码给贴出来了。不是完整的工程哈。