STM32–SPI通信与W25Q64(1)
文章目录
- SPI外设
- 特征
- SPI框图
- 传输模式
- 主模式全双工连续传输
- 非连续传输
- 硬件SPI读写W25Q64
SPI外设
STM32内部集成了硬件SPI收发电路,可以由硬件自动执行时钟生成、数据收发等功能,减轻CPU的负担。
特征
| 3线全双工同步传输 |
| 8或16位传输帧格式选择 |
| 主或从操作 |
| 支持多主模式 |
| 8个主模式波特率预分频系数(最大为fPCLK/2) |
| 主模式和从模式下均可以由软件或硬件进行NSS管理:主/从操作模式的动态改变 |
| 可编程的数据顺序, MSB在前或LSB在前 |
| 可编程的时钟极性和相位 |
| SPI总线忙状态标志 |
| 兼容I2S协议 |
STM32F103C8T6 硬件SPI资源:SPI1、SPI2
SPI框图
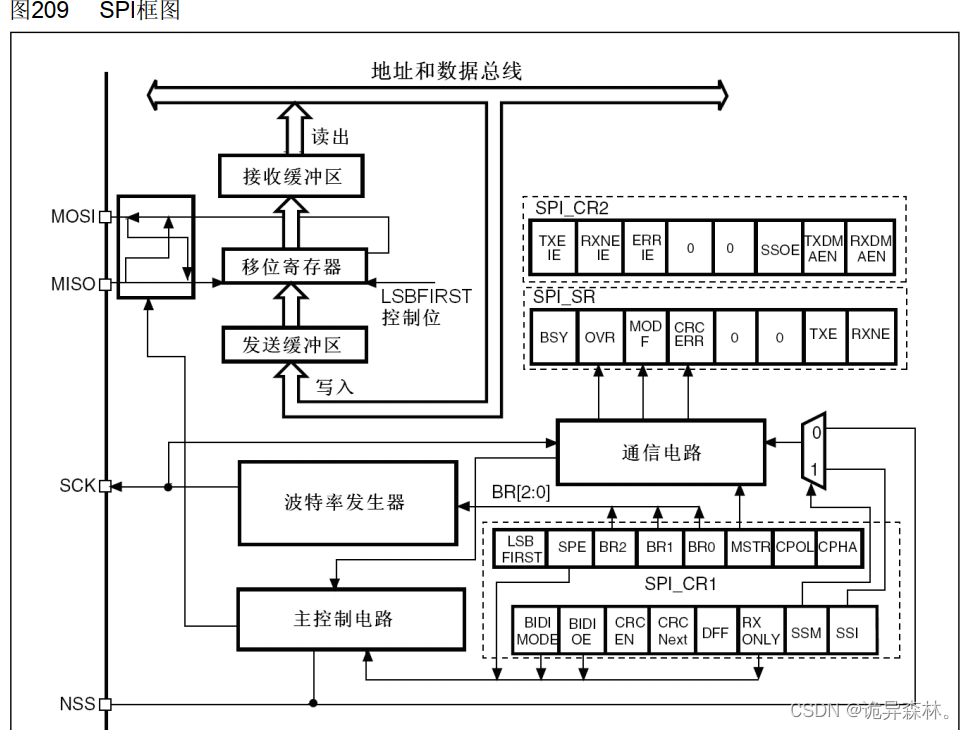
通过主控制电路来控制数据的传输;
先看左上角部分,对于接收的数据,会从MISO引脚进入;数据一位一位的进入移位寄存器,当有一个字节(或者两个字节大小)的数据在移位寄存器时,传送移位寄存器里的数据到接收缓冲器,并且RXNE标志被置位;
这里的RXNE是是接收缓冲区的标志位,

读SPI_DR接收寄存器可以清除RNXE标志位;
在连续传输数据中,一个要接收的数据只有被读出,下一个数据才有机会进入接收缓冲器。而利用RNXE标志位即可知道当前数据是否被读出。否则,下一个数据会对当前数据进行覆盖,那么读取数据就会造成错误。
对于要发送的数据,会将写入数据先放在发送缓冲器中,在发送第一个数据位时,数据字被并行地(通过内部总线)传入移位寄存器,而后串行地移出到MOSI脚上;(可自行设定低位先行还是高位先行); 数据从发送缓冲器传输到移位寄存器时TXE标志将被置位。
发送到移位寄存器的标志位

只要写入SPI_DR寄存器那么TXE标志位就会被清除。这里将移位寄存器和接收缓冲区和发送缓冲区合在一起,就是数据寄存器;
这里要注意,数据寄存器内部会分为两部分,接收和发送,移位寄存器是共用的,但传输单位最小是8bit或者是16bit,都是以字节为单位的,不会造成同时进行发送和接收的冲突;
右边则是将寄存器的位都标出来了,CR是控制寄存器,只要是产生使能的寄存器;SR是状态寄存器,比较重要的就是刚才介绍的两个RXNE和TXE;
波特率发生器用来控制SCK分频;
传输模式
主模式全双工连续传输
同时进行传输的
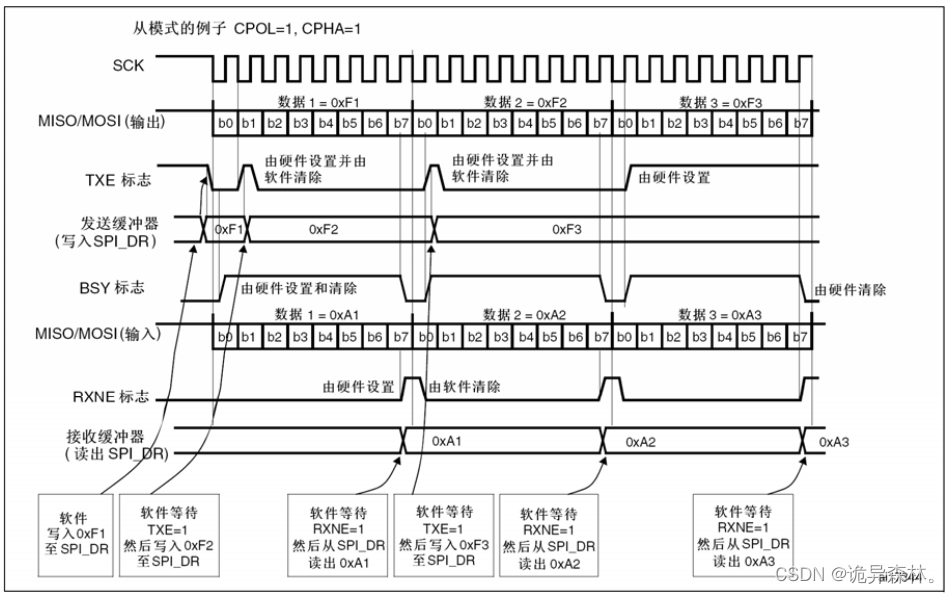
一开始,会先写入一个数据1,接着会使标志位TXE置非空,等到TXE位空时,再写入一个数据2,此时会等待RXNE非空时,读取数据A1,接着就是等到TXE为空,再写入一个数据3,然后又是等待RXNE非空时,读取数据A2…以此传输下去,到最后,RXNE非空,读取数据AN,TXE也为空时,BSY位置0,关闭SPI模块;
这里的连续传输就是在一开始一个数据写入之后,还会继续写入一个数据,由于是同时进行传输,所以等到读取数据后又写入一个数据;
在最后会连续读取两个数据表示结束。
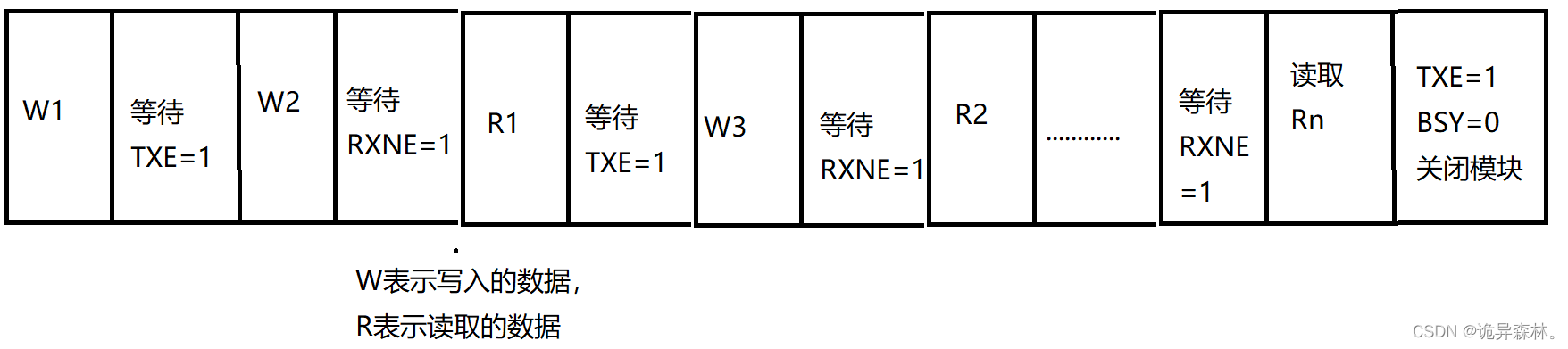
非连续传输
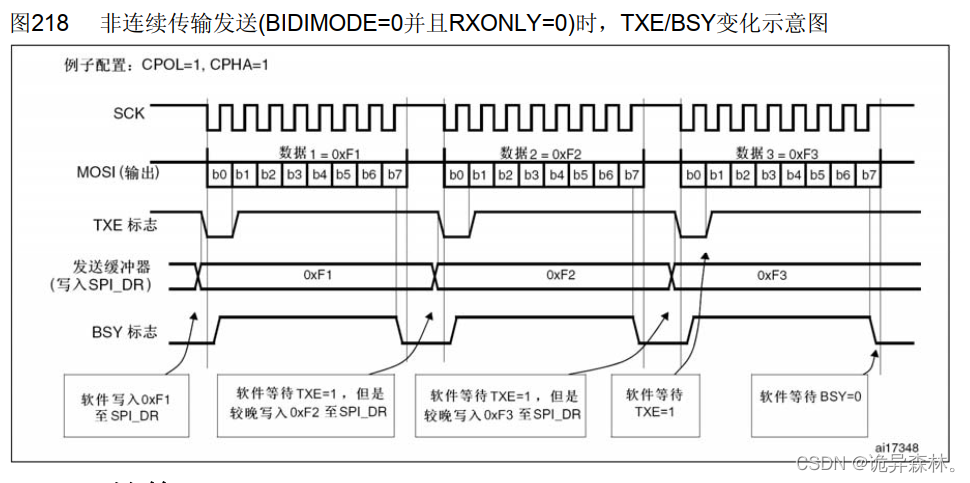
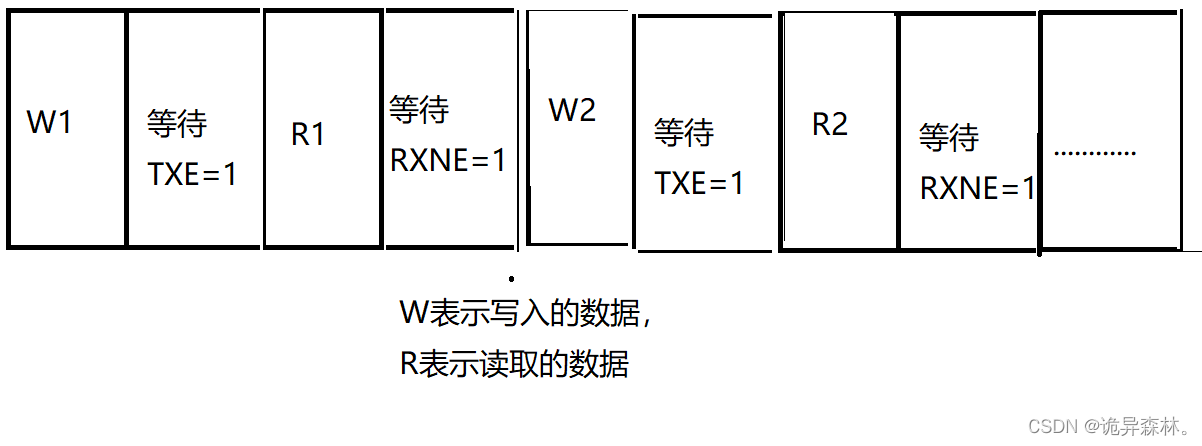
一开始写入一个数据1,接着会等待TXE为空时,此时读取一个数据A1,接着会等待RXNE非空时,再写入数据2,以此类推。
对于写入的数据,等待TXE为空后,本来可以再写入一个数据,但是在这种模式是读取一个数据,等到RXNE非空时,再写入数据;
你会发现,在标志位后本来是做出对应的事件,但是这种方式却是选择等待,也就是传输的数据是不连续的。
硬件SPI读写W25Q64
这里的接线方式和试验方法和软件读写是一致的,只是将MySPI.进行改装。
#include "stm32f10x.h" // Device header
//片选电平
void MySPI_W_SS(uint8_t Byte)
{
GPIO_WriteBit(GPIOA,GPIO_Pin_4,(BitAction)Byte);
}
//初始化
void MySPI_Init()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_4;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_5|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU; //上拉输入
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
SPI_InitTypeDef SPI_InitStructure;
SPI_InitStructure.SPI_BaudRatePrescaler=SPI_BaudRatePrescaler_128; //设置SCK时钟波特率分频值
SPI_InitStructure.SPI_CPHA=SPI_CPHA_1Edge;//指定哪个边沿开始捕获
SPI_InitStructure.SPI_CPOL=SPI_CPOL_Low; //低边沿为常态
SPI_InitStructure.SPI_CRCPolynomial=7; //CRC设置值,默认值为7
SPI_InitStructure.SPI_DataSize=SPI_DataSize_8b;//传输数据大小(bit)
SPI_InitStructure.SPI_Direction=SPI_Direction_2Lines_FullDuplex;//设置双工和收发
SPI_InitStructure.SPI_FirstBit=SPI_FirstBit_MSB;//指定传输从低位还是高位开始
SPI_InitStructure.SPI_Mode=SPI_Mode_Master;//主从模式
SPI_InitStructure.SPI_NSS=SPI_NSS_Soft;//软件设置
SPI_Init(SPI1,&SPI_InitStructure);
SPI_Cmd(SPI1,ENABLE);
MySPI_W_SS(1);
}
//开始
void MySPI_Start()
{
MySPI_W_SS(0);
}
//结束
void MySPI_Stop()
{
MySPI_W_SS(1);
}
//交换字节
uint8_t MySPI_SwapByte(uint8_t SendByte)
{
while(!SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_TXE));
SPI_I2S_SendData(SPI1,SendByte);
while(!SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_RXNE));
return SPI_I2S_ReceiveData(SPI1);
}
对于片选信号,我们用GPIO引脚表示高低电平会更加容易;
对于A5和A7引脚,由于SPI外设是GPIO口的片上外设,所以要采用复用功能;
这里SPI外设的传输是有多种模式,我们选择全双工收发模式;
高位开始低位开始传输也是可以选择的;
最后要记得要启用SPI,否则将无效;
这里的交换字节采用非连续传输的方式,我们的顺序与上面的逻辑图是相反的,是因为对于标志位,在读取和写入时会自动清除标志位,先写标志位,再写发送数据和读出数据会更加方便;
在这里说一下试验的注意事项,
对于扇区擦除,只要输入的数据在指定扇区,那么就会对那一片扇区进行擦除;
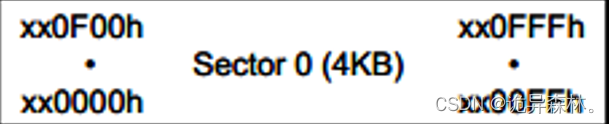
这是一片扇区,那么输入000000h到000FFFh的地址位,都是对该扇区的擦除;
对于测试连续写入多字节时,最多写入一页的数据,超过页尾位置的数据,会回到页首覆盖写入。
我们可以以000000h为头,那么0000FFh就是尾,(页的大小)进行测试;通过改变地址来进行验证。
![数字化智能工厂信息化系统集成整合规划建设方案[150页word]](https://img-blog.csdnimg.cn/img_convert/6caf01f49afd4b73b48d40a949facb0d.jpeg)