BLDC方波控制
- BLDC工作原理
- BLDC换向驱动过程
- 有感控制模式
BLDC工作原理
首先要知道,BLDC转起来是基于什么原理
-
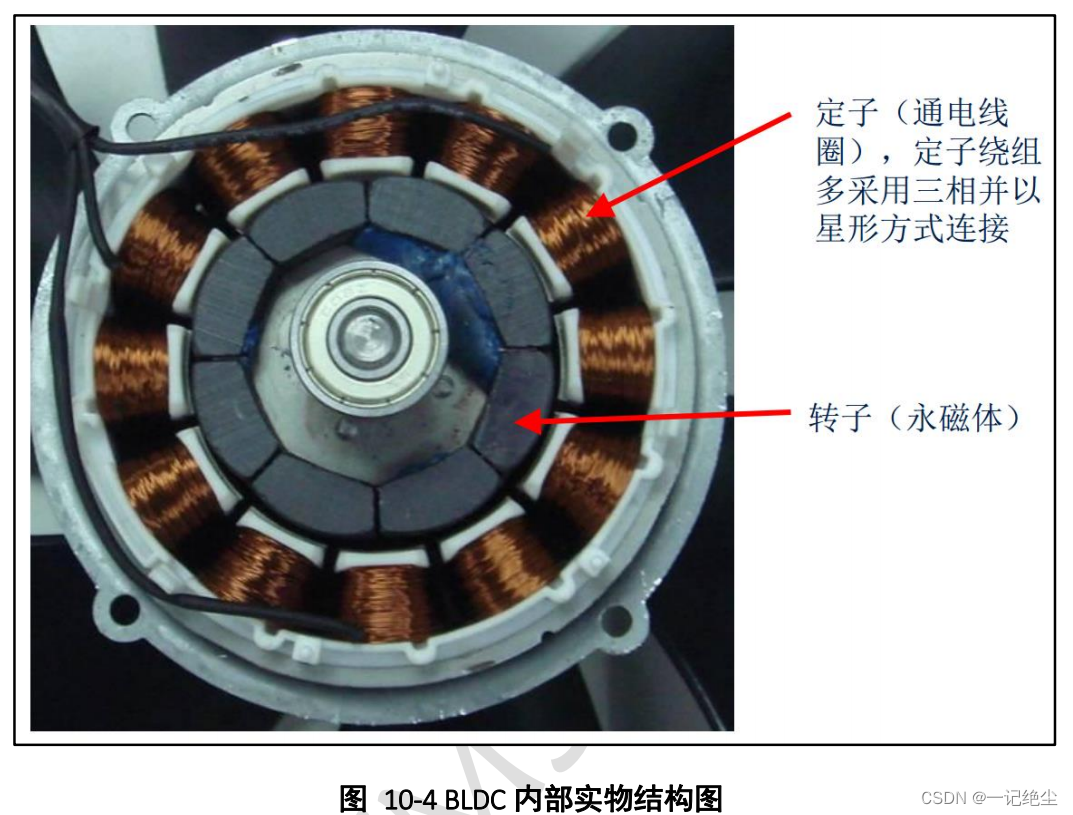
BLDC包括定子(线圈)和转子(永磁体),线圈要通电,通电的线圈具有磁场,该磁场和永磁体的磁场类似。
-
而磁体是异性相吸,同性相斥,通电线圈和永磁体之间就具有这种现象。所以无刷直流电机就是利用了通电线圈(定子)和永磁体(转子)相互作用的原理,实现转动
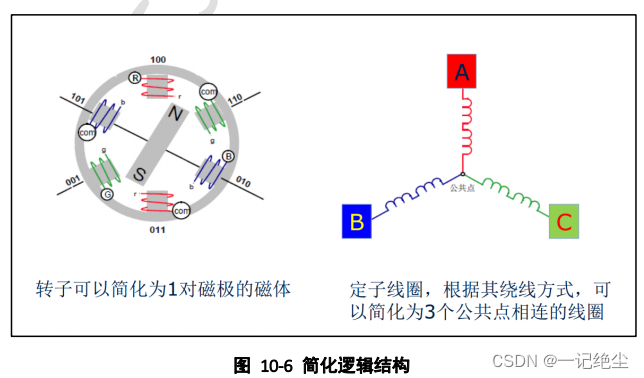
如图10-6,ABC三相具有公共点,这个公共点是:以A相为例,在绕定子绕组上缠绕线圈的时候,一端留着,用来当A相接驱动板,这个绕组缠完后,另一端直接绕到相对的另一个绕组上,最后流出来的是公共端,与BC两相的公共端相连。如下图,对应字符是相连的。
BLDC是怎么转起来的
-
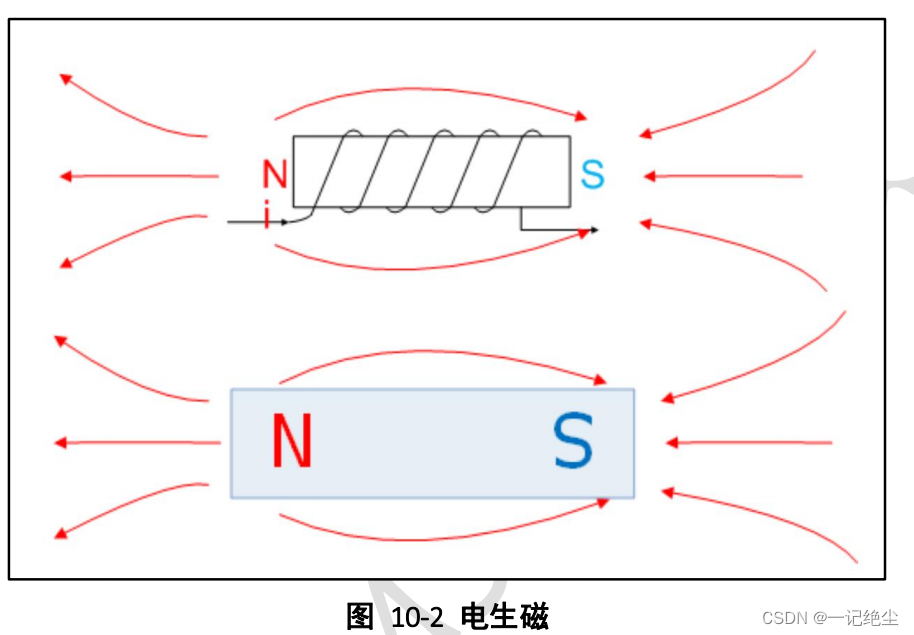
六步换向控制,每次通两相,这样通电的线圈就会产生自己的磁场,并且二者的合成磁场满足矢量合成原则。电源正级进入处为N极,电源负极输出处为S极,合成的矢量方向为转子方向
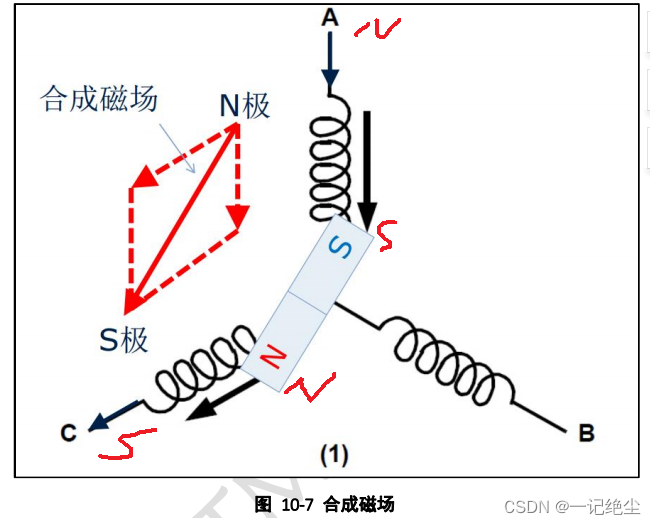
-
如果一直只是通固定的两相,则转子就是一直受这个合成磁场的作用,一直固定在同一个位置。想要电机转起来,需要改变通电线圈的顺序,利用合成磁场方向,控制转子改变方向,进而实现转动。也就是说,想要控制BLDC旋转,根本的问题就是产生这6拍工作方式的电压信号,即六步换向。
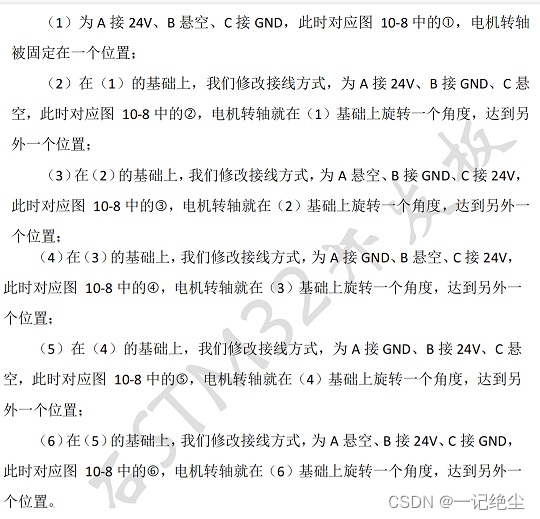
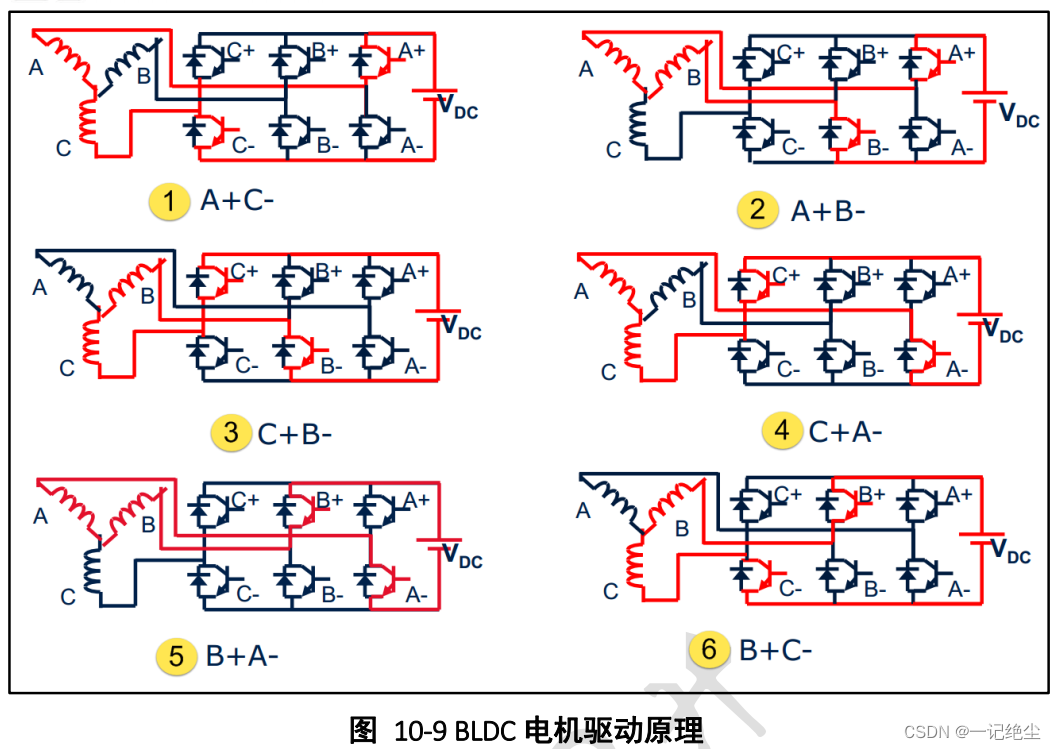
举个例子来说明,假定一个 BLDC 的额定电压为 24V,电机三根线就定义为 A、B、C:
BLDC换向驱动过程
现在想让 BLDC 旋转起来的一个问题就是如何任意的控制 A、B、C 线的电压
利用MOS管作为电子开关可以解决这一问题。
那怎么样去控制MOS管的开通和关断呢?
利用MCU(如ST32)来控制MOS管的开通和关断。当然,STM32 引脚直接接入到 MOS 管引脚控制是不行的,因为要使 MOS 管导通需要一定的条件,直接使用 STM32 引脚电平是达不到这个条件的,一般 MOS 管控制是需要专用的驱动电路来实现的,使用专用的 MOS 管驱动 IC 来实现。
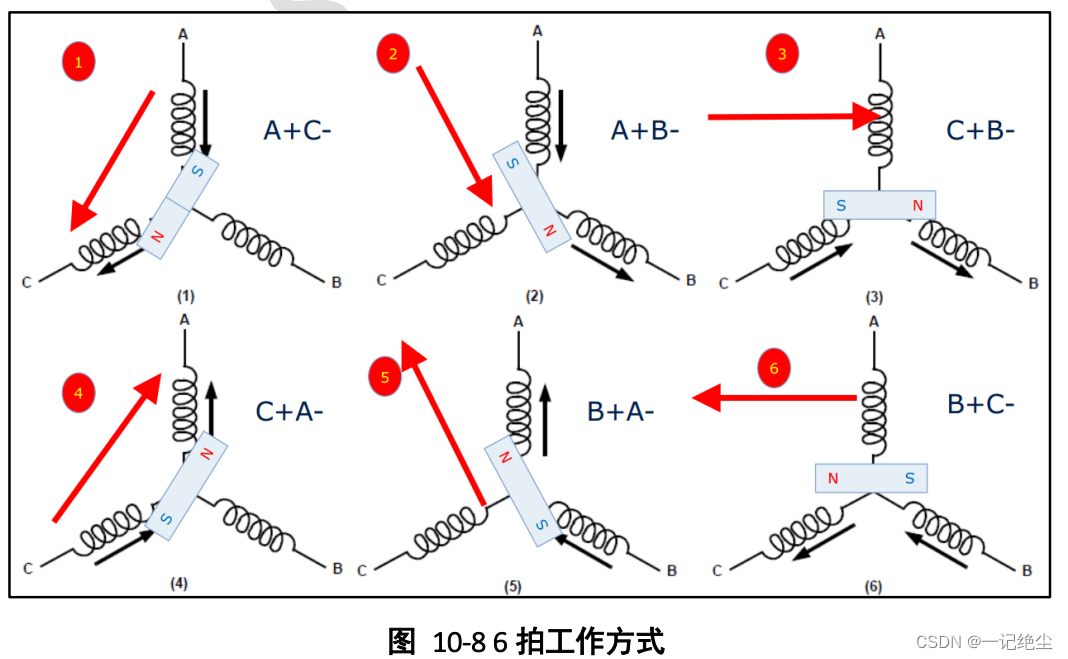
上面解决了绕组电压控制,还有一个问题就是究竟什么时候要给哪个绕组正电压、给哪个绕组负电压以及哪个绕组悬空,就是具体当前时刻要选择图 10-9 中“哪一步”?
BLDC 驱动还需要一个非常重要的参数,只有知道了这个参数信息我们才有可能正常的控制 BLDC 旋转,这个重要参数就是转子的位置信息,只有知道了当前转子所处位置,我们才能很好的控制电机旋转,如果毫无目的根据图 10-9 中顺序为绕组给电,最终只能看到电机乱转。
转子的位置信息一般可以为 2 种方法取得,一种是有霍尔传感器模式,另外一种是无传感器模式。
有感控制模式
霍尔传感器是根据霍尔效应制作的一种磁场传感器,它可以有效的反映通过霍尔原件的磁密度,见图 10-10。
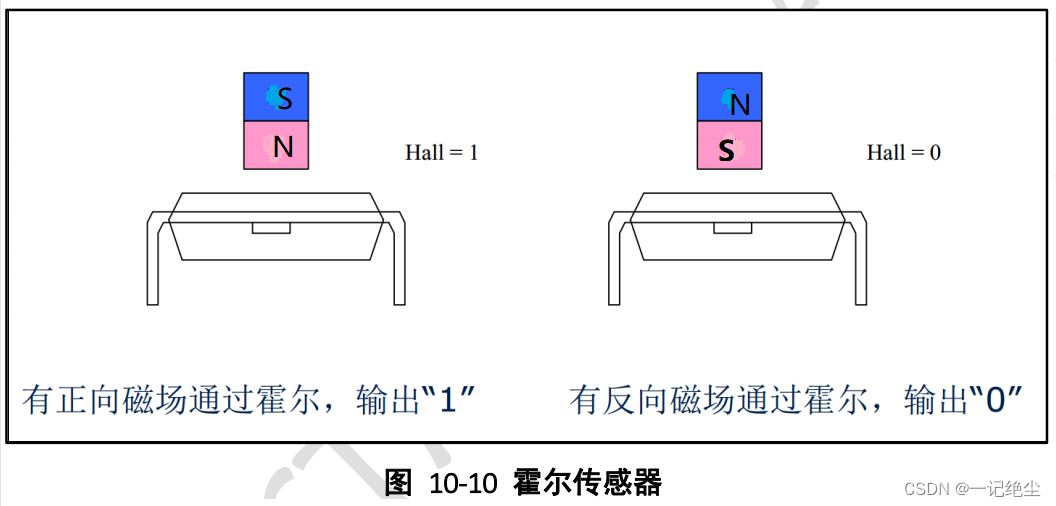
当霍尔在和电机的转子做相对运动时,会随着转子下磁密度的变化,产生变化的信号。
下图是电机旋转一圈时,霍尔传感器的信号变化,电机旋转一圈是360°(机械角度),则霍尔传感器的电角度为360*4=1440°
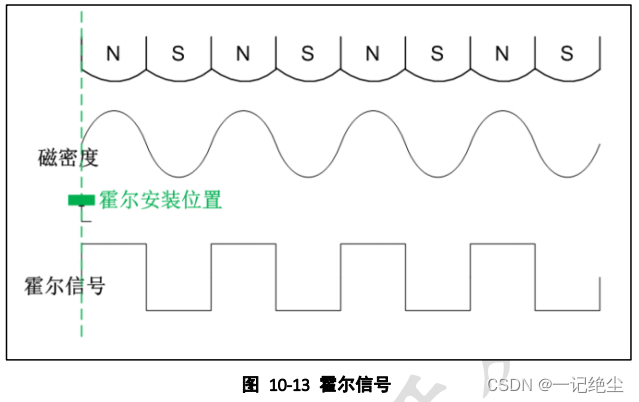
电机按照一定的方向旋转时,3 个霍尔的输出会按照 6 步的规律变化
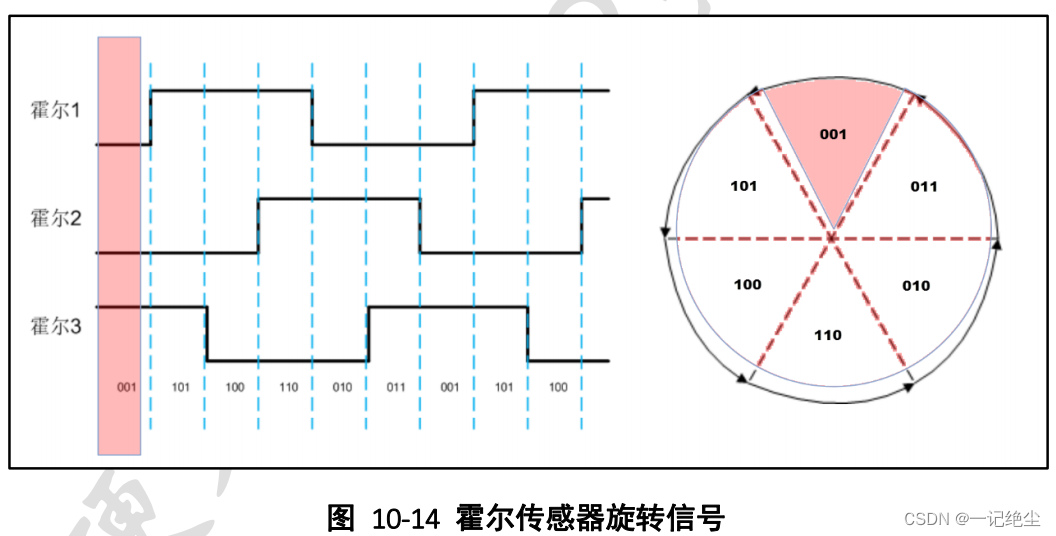
结合之前介绍的 BLDC 六步控制,在每个霍尔信号都对应一个 BLDC 控制步,使得 BLDC 旋转一个角度,这样可以制作下表:表格 10-1 和表格 10-2:


特别注意,一般 BLDC 厂家都会给出一个霍尔传感器和绕组得电情况对应关系表,不一定跟上面两个表都完全对应一致,但是原理分析都是一致的。
上面两个表的对应意思就是:当检测到霍尔传感器信号为某个值时,控制六 个桥臂对应的开关状态。例如,我们想让电机正转,就用表格 10-1 中的对应信息,
- 假设 STM32 检测到当前的霍尔信号为:霍尔#1、#2、#3 分别对应为 1、0、1,那么此时我们应该让 STM32 控制 A-和 C+桥臂导通,而其他桥臂都关断,在 A-和 C+桥臂导通情况下,电机的转子会向着一个位置旋转;
- 在旋转到达目标位置之前,霍尔传感器信号就会发生改变,此时变为:霍尔#1、#2、#3 分别对应为 0、0、1,好了,此时我们马上把 C+桥臂关断,而把 B+桥臂打开,即此时 A-和 B+桥臂导通,其他桥臂关断,电机就又向旋转一个角度。这样,如此循环下去,电机就可以不停的旋转了。
如果不管霍尔信号变化,就按表中任一种给电,电机会怎样的呢?电机会固定在一个位置,实际上,这种情况是很危险的,我们知道,绕组都是漆包线铜丝,电阻非常小,当总是给电时候,电路中电流就非常大,严重情况,烧毁电机或者电源
特别的,如果直接导通 A+和 A-这两桥臂,或者 B+和 B-这两桥臂,或者 C+和 C-这两桥臂会出现什么情况呢?结果就是电源必烧无疑,这些情况相当于电源正负极直接短路,所以这要求我们在接线或者电路设计是非常小心!!!
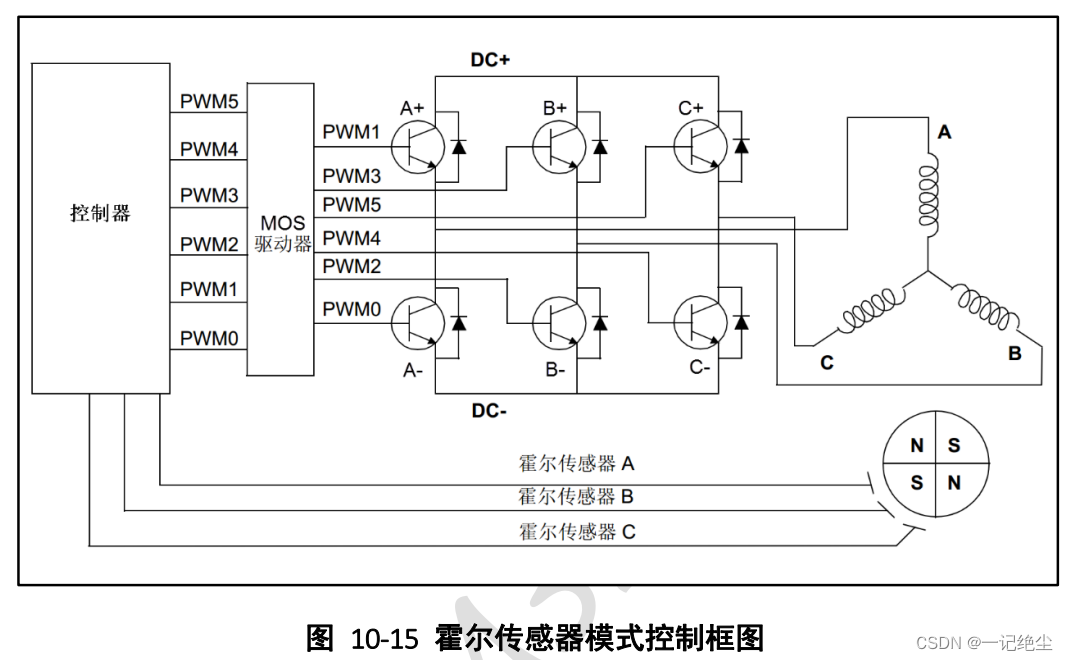
最终,BLDC驱动电路和控制器组成的系统见图 10-15。