进程替换和信号
问题引入
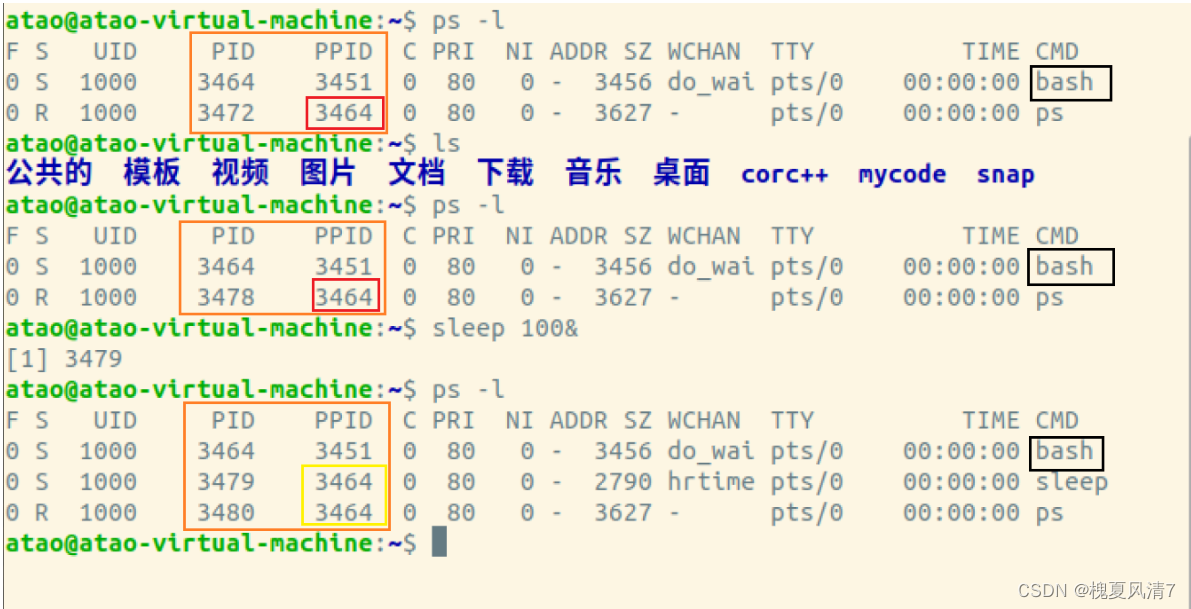
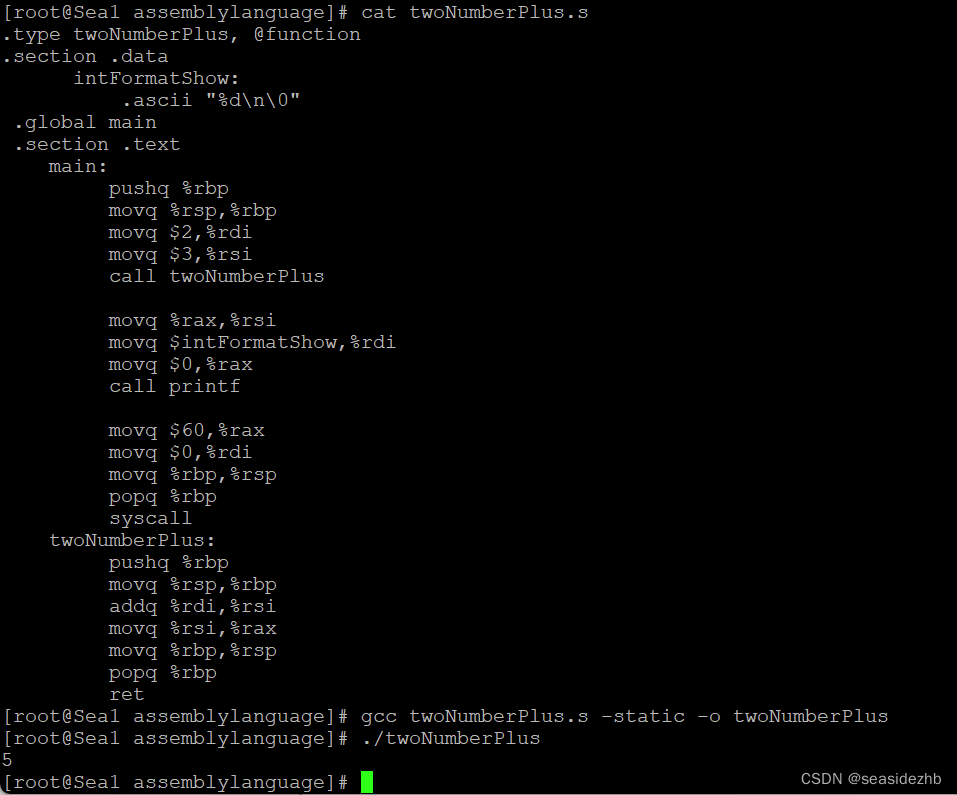
我们发现 终端输入的任意命令的父进程都是bash,这是因为Linux系统是用fork()复制出子进程,然后在子进程中调用替换函数进行进程替换,实现相关命令。
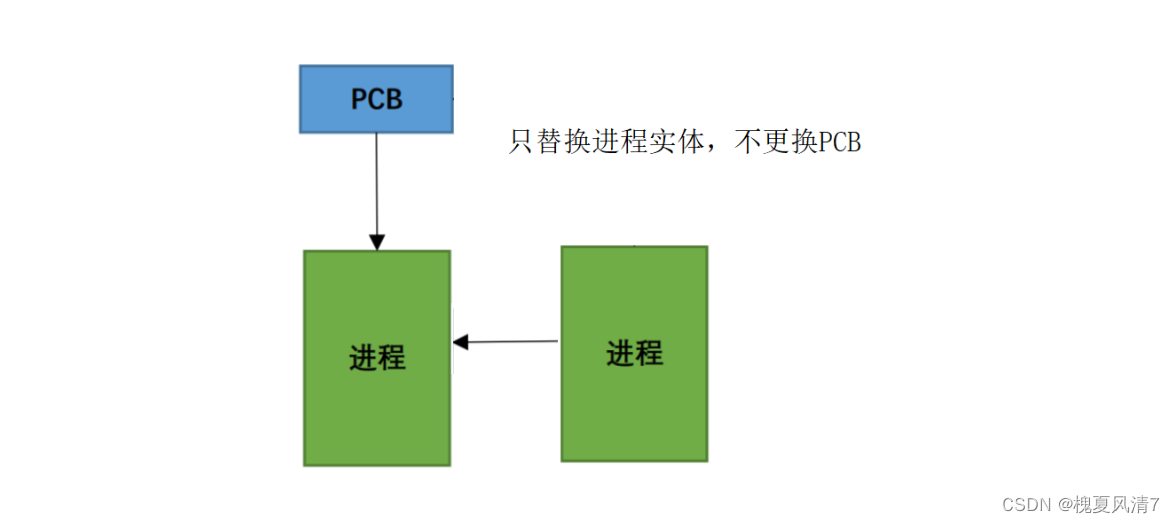
(1) exec 系列替换过程:pcb 使用以前的只修改,进程实体更换。
进程替换函数
#include <unistd.h>
int execl( const char * path, const char * arg,…);
/*
*path:新替换的程序的路径名称
*arg :传给新程序主函数的第一个参数,一般为程序的名字
*arg 后面是剩余参数列表,参数个数可变,必须以空指针作为最后一个参数
*/
int execlp( const char * file, const char * arg,…);/*
int execlp( const char * file, const char * arg,…);
/*
*file:新替换的程序的名称
*arg :传给新程序主函数的第一个参数,一般为程序的名字
*arg 后面是剩余参数列表,参数个数可变,必须以空指针作为最后一个参数
*/
int execle( const char * path, const char * arg,…, char * const envp[]);
/*
*path:新替换的程序的路径名称
*arg :传给新程序主函数的第一个参数,一般为程序的名字
*arg 后面是剩余参数列表,参数个数可变,必须以空指针作为最后一个参数*const envp[] : 存放环境变量
*/
int execv( const char * path, char * const argv[]);
/*
*path:新替换的程序的路径名称const argv[] :存放命令参数的指针数组
*/
int execvp( const char * file, char * const argv[]);
/*
*file: 新替换的程序的名称const argv[] :存放命令参数的指针数组
*/
int execve( const char * path, char * const argv[], char * const envp[]);
/*
*path:新替换的程序的路径名称const argv[] :存放命令参数的指针数组
*const envp[] : 存放环境变量
*/
使用模板如下
#include<stdio.h>
#include<stdlib.h>
#include<assert.h>
#include<unistd.h>
#include<string.h>
#include <sys/wait.h>
int main(int agrc,char*argv[],char*envp[]){
printf("main pid=%d \n",getpid() );
assert(pid!=-1);
if(pid==0)
{
printf("child pid=%d,ppid=%d\n",getpid(),getppid());
//1. execl("/bin/ps","ps","-f",(char*)0);
//2. execlp("ps","ps","-f",(char*)0);
//3. execle("/usr/bin/ps","ps","-f",(char*)0,envp);
char* myargv[]={"ps","-f",0};
//4. execv("/usr/bin/ps",myargv);
//5. execvp("ps",myargv);
//6. execve("/usr/bin/ps",myargv,envp);
exit(0);
}
exit(0);
}
Linux 信号的使用
信号是系统响应某个条件而产生的事件,进程接收到信号会执行相应的操作。
与信号有关的系统调用在“signal.h”头文件中有声明
常见信号的值,及对应的功能说明
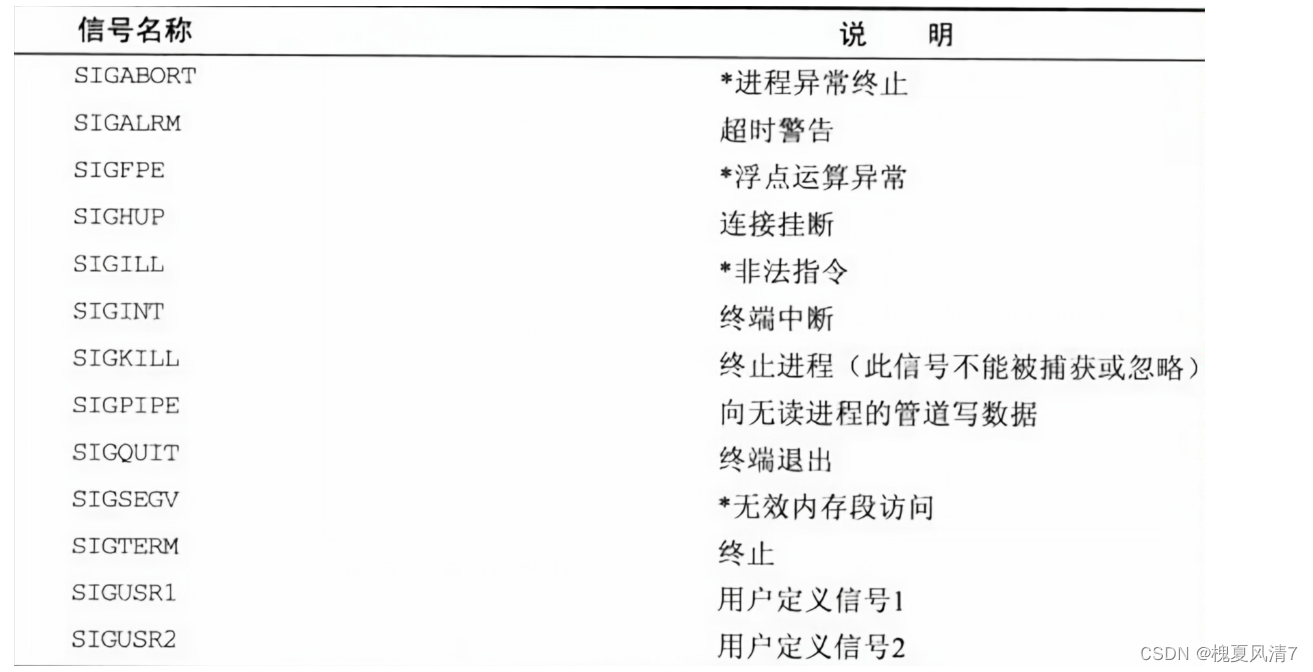
信号的值在系统源码中的定义如下:
- #define SIGHUP 1
- #define SIGINT 2 //键盘按下 Ctrl+c 时,会产生该信号
- #define SIGQUIT 3
- #define SIGILL 4
- #define SIGTRAP 5
- #define SIGABRT 6
- #define SIGIOT 6
- #define SIGBUS 7
- #define SIGFPE 8
- #define SIGKILL 9 //该信号的响应方式不允许改变
- #define SIGUSR1 10
- #define SIGSEGV 11
- #define SIGUSR2 12
- #define SIGPIPE 13 //读端关闭的描述符,写端写入时产生,该信号会终止程序
- #define SIGALRM 14
- #define SIGTERM 15 //系统 kill 命令默认发送的信号
- #define SIGSTKFLT 16
- #define SIGCHLD 17 //子进程结束后,会默认给父进程发送该信号
- #define SIGCONT 18
- #define SIGSTOP 19
- #define SIGTSTP 20
- #define SIGTTIN 21
- #define SIGTTOU 22
- #define SIGURG 23
修改信号的响应方式 – 调用signal()
typedef void (*sighandler_t)(int); //函数指针类型重命名
**sighandler_t ** signal(int signum, sighandler_t sig_fun)
/*
signum : 处理的信号
sig_fun :处理信号的函数
1.SIG_IGN 忽略
2.SIG_DFL 默认
3.自定义:自己写处理信号的函数
示例代码:
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <string.h>
#include <signal.h>
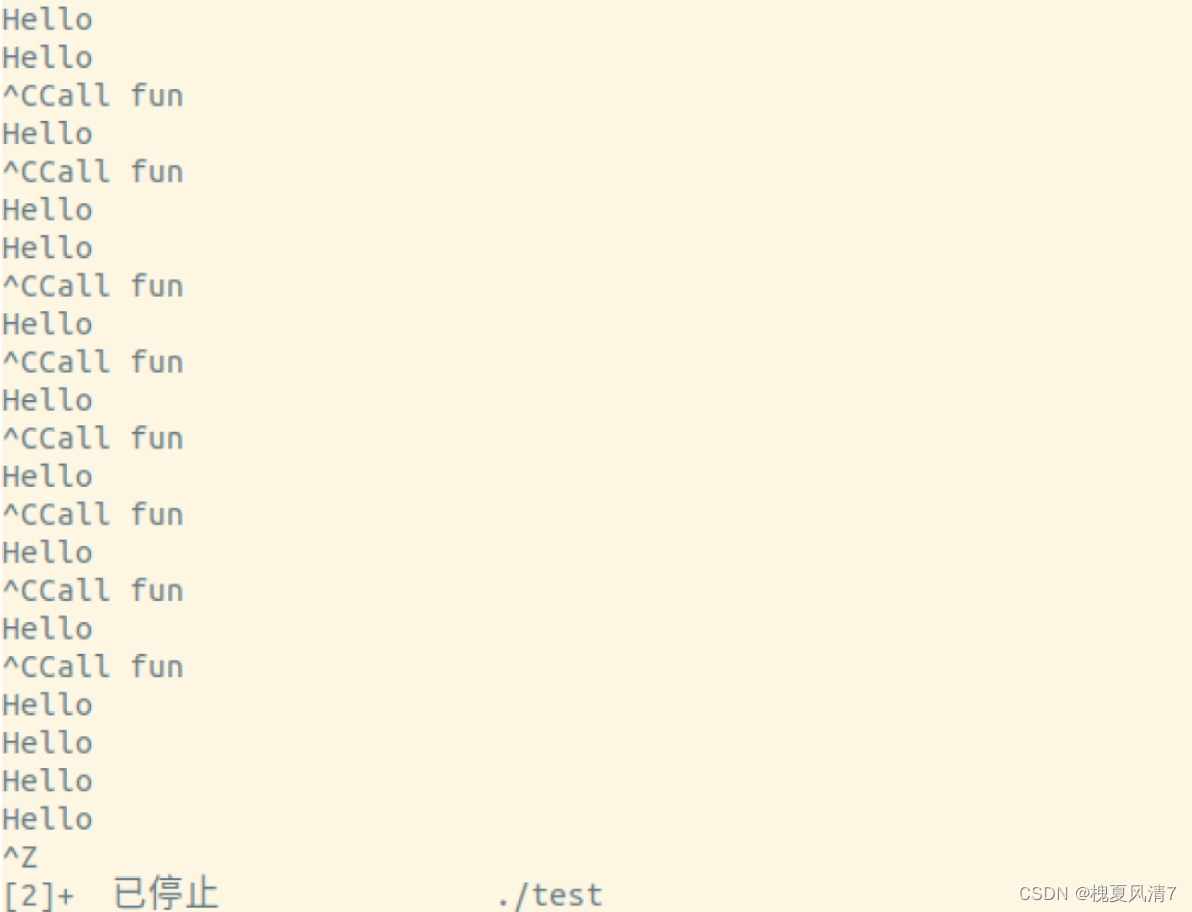
void fun(int signum)
{
printf("Call fun \n");
}
int main()
{
signal(SIGINT,fun);
while(1)
{
sleep(1);
printf("Hello\n");
}
exit(0);
}
运行结果
发送信号 – kill()
kill() 可以向指定的进程发送指定的信号:
int kill(pid_t pid, int sig);
pid > 0 指定将信号发送个那个进程
pid == 0 信号被发送到和当前进程在同一个进程组的进程
pid == -1 将信号发送给系统上有权限发送的所有的进程
pid < -1 将信号发送给进程组 id 等于 pid 绝对值,并且有权限发送的所有的进程。
sig 指定发送信号的类型。
示例代码:
1.mykill.c
#include <stdlib.h>
#include <stdio.h>
#include <string.h>
#include <signal.h>
int main(int argc,char* argv[])
{
if(argc != 3)
{
printf("argc error\n");
exit(1);
}
int pid = atoi(argv[1]);
int sig = atoi(argv[2]);
if(kill(pid,sig) == -1)
{
printf("kill error\n");
}
exit(0);
}
2.test1.c
#include<stdio.h>
#include<stdlib.h>
#include<assert.h>
#include<unistd.h>
#include<string.h>
#include<signal.h>
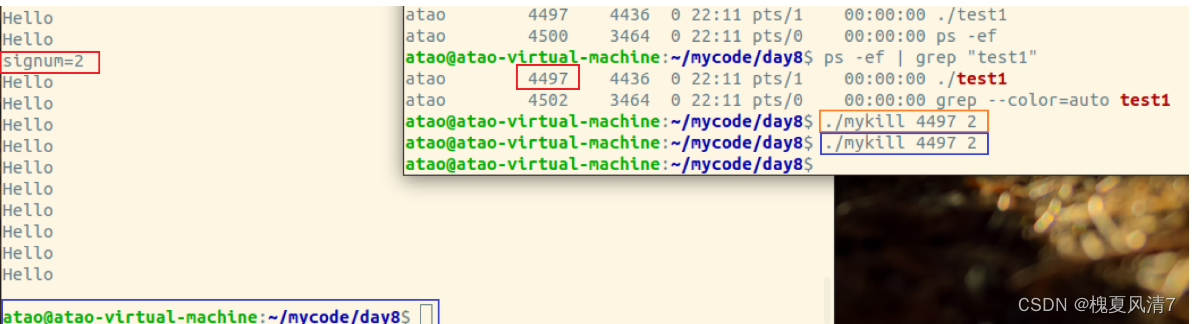
void fun(int signum)
{
printf("signum=%d \n",signum);
signal(SIGINT,SIG_DFL);
}
int main()
{
signal(SIGINT,fun);
while(1)
{
sleep(1);
printf("Hello\n");
}
exit(0);
}
用信号处理fork()僵死进程
#include<stdio.h>
#include<stdlib.h>
#include<unistd.h>
#include<string.h>
#include<signal.h>
#include<sys/wait.h>
void fun_sig(int sig)
{
wait(NULL);
}
int main()
{
char*s=NULL;
int n=0;
signal(SIGCHLD,fun_sig);
pid_t pid=fork();
if(pid==-1){
exit(1);
}
if(pid==0)
{
s="child";
n=3;
}
else
{
s="parent";
n=7;
}
int i=0;
for(;i<n;i++){
printf("s=%s,pid=%d\n",s,getpid());
sleep(1);
}
exit(0);
}