摘要
Our test shows how the algorithm breaks down as the sampling rate of the GPS is reduced. We also test the effect of increasing amounts of additional measurement noise in order to assess how well our algorithm could deal with the inaccuracies of other location measurement systems, such as those based on WiFi and cell tower multilateration. (这是本文的一个中心,测试频率变化和噪声对算法准确性的影响)
Our second contribution is a test of our map matching algorithm where we vary the levels of noise and sparseness of the sensed location data over a 50 mile urban drive(测试方式)
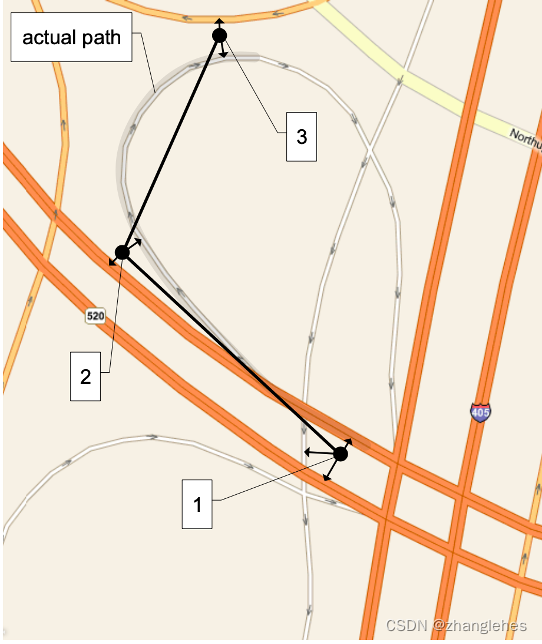
There is a feasible driving path, possibly very circuitous, from each of the nearest points on these three roads to points on the two roads near 𝑧2 at 𝑡 = 2, and similarly for 𝑡 = 3. The goal of our algorithm is to find the most probable path through the lattice by picking one road segment for each 𝑡. (如果只是最短距离的匹配,那么第二、第三个点将匹配错误)
One potential problem with purely geometric approaches is their sensitivity to measurement noise and sampling rate. (基于轨迹图形的算法存在的潜在问题)
One of the earliest applications of the HMM to map matching is from Lamb and Thiébaux [13] who use a combination of a Kalman filter and HMM. (Kalman filter待研究)
In our map matching algorithm, the states of the HMM are the individual road segments, and the state measurements are the noisy vehicle location measurements. (隐马尔可夫模型的观察变量和隐形状态的定义)
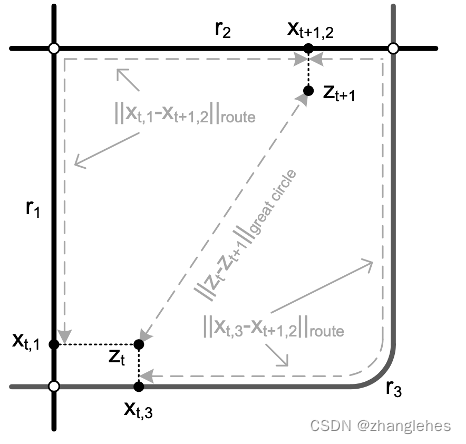
(基于绕路惩罚的转移概率)
dt=fabs(|zt-zt+1|great circle -||xt,i-xt+1,j||route)
pdt= 1βe-dtβ
Time differences are much more sensitive to traffic conditions, so are likely less reliable than distance differences. (这也是一种思路,它是说如果能得到两个投影点的行驶预估时间,然后和实际的时间进行比较,那么相近的转移概率更大。个人觉得如果eta时间能比较准确的话,确实是一个好办法)
Before the GPS points are used to construct the HMM, we move through the points in time sequence, removing points that are within 2𝜎𝑧 of the previous included point. (去掉不动点)
Parameter Estimation(本文提供了两个常量参数的计算方法)


When a break is detected between time step 𝑡 and time step 𝑡 + 1, we remove measured points 𝑧𝑡 and 𝑧𝑡+1 from the model, and check to see if the break has been healed. The break is considered healed if the measured points at 𝑡 − 1 and 𝑡 + 2 lead to a reconnection in the HMM after rechecking the points with the bulleted conditions above. (另一种识别跳点、不连续点的思路)
We made this data available to facilitate the fair comparison of map matching algorithms. We believe this is the only public data set in existence for map matching. (新的算法可以使用他们提供的数据进行验证)
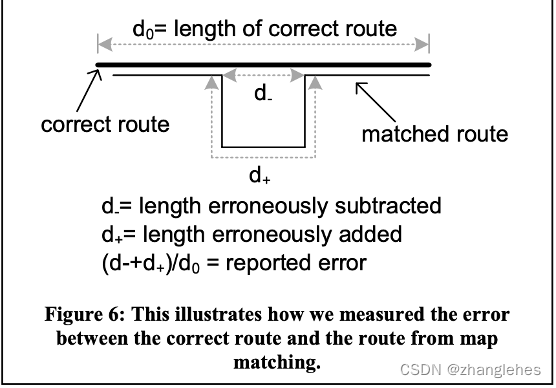
准确率的评估方式
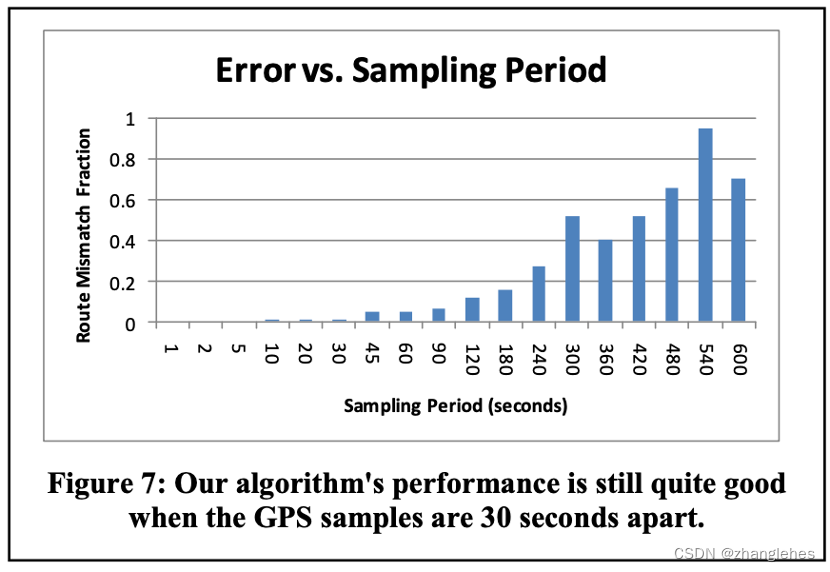
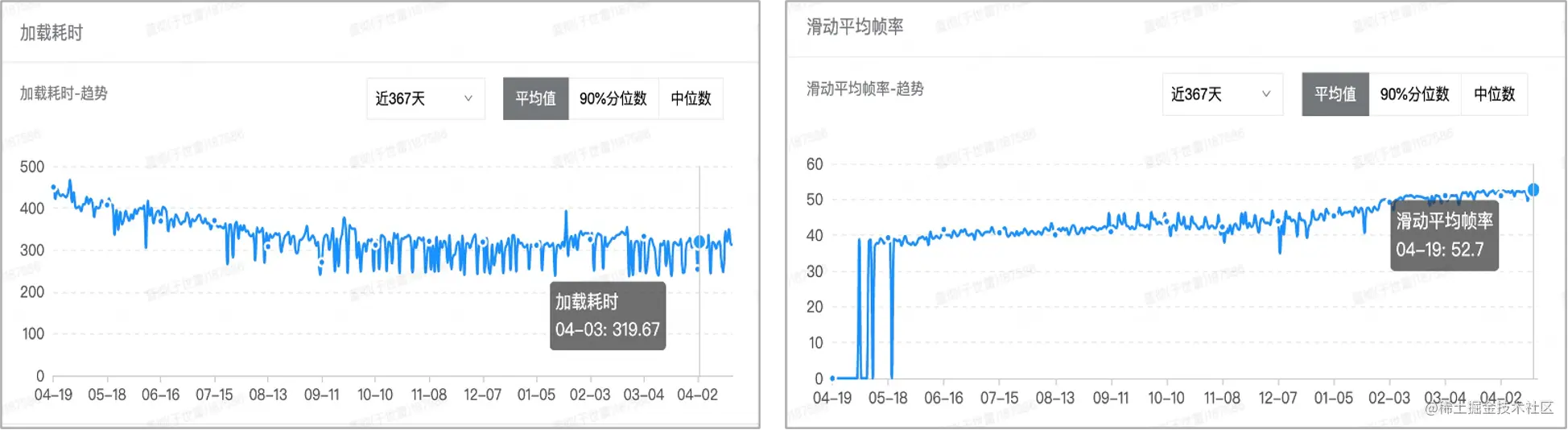
低频下匹配准确度的变化趋势
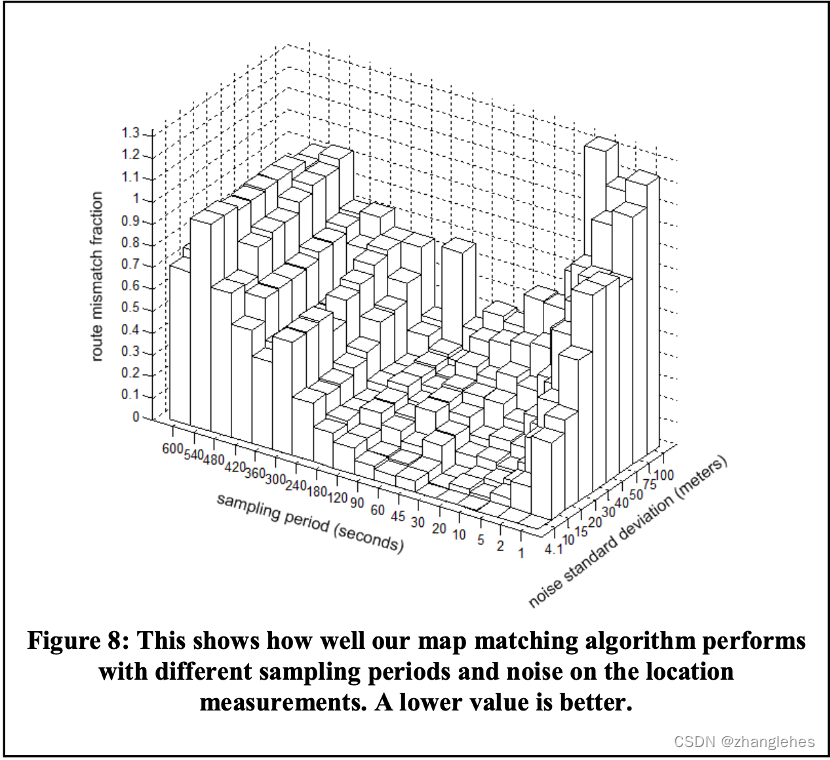 (This is likely because frequent, noisy points tend to pull the route rather violently in different directions. )Noise在不同频率下对准确度的影响。通常会认为频率越高,对算法是越友好的。
(This is likely because frequent, noisy points tend to pull the route rather violently in different directions. )Noise在不同频率下对准确度的影响。通常会认为频率越高,对算法是越友好的。
小结
- 本文首先给了一个清楚的示例,为何最短距离匹配的方法存在不合理。
- 其次提出了一种基于eta的转移概率的算法,如果eta准确度较高的话,是可以尝试的。
- 然后再给出了两个常量的计算公式。
- 同时给出了处理跳点的另一个思路。
- 最后给出了不同频率和噪声对于准确率的影响。