stm32基于HAL库驱动外部SPI flash制作虚拟U盘
- 📌参考文章:
https://xiaozhuanlan.com/topic/6058234791 - 🎞实现效果演示:
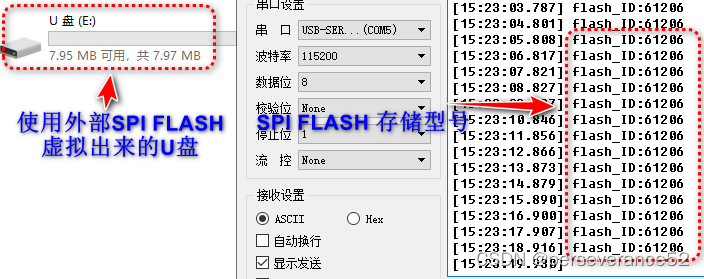
- 🔖上图中的读到的
FLASH_ID所指的是针对不同容量,所对应的ID。
//W25X/Q不同容量对应不同ID关系
W25Q80 ID 0XEF13
W25Q16 ID 0XEF14
W25Q32 ID 0XEF15
W25Q64 ID 0XEF16
W25Q128 ID 0XEF17
W25Q256 ID 0XEF18

- 🔖在电脑端,支持对虚拟出来的存储器进行读写操作。

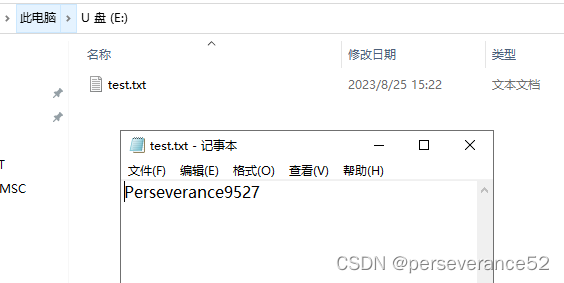
- ✨如果设计成一块PCB,可以制作成一个微小容量的移动U盘。
- 🌿基于STM32F103,HAL库生成的代码,可以移植到任意支持USB接口的STM32单片机上使用。
- 🌿程序烧录后,通过PA11/PA12 USB初次连接电脑,会弹出提示格式化窗口。之后就可以使用,包括拷贝和创建文件到盘符内,保存数据后,拔插设备,数据不丢失。
stm32cumx配置
-
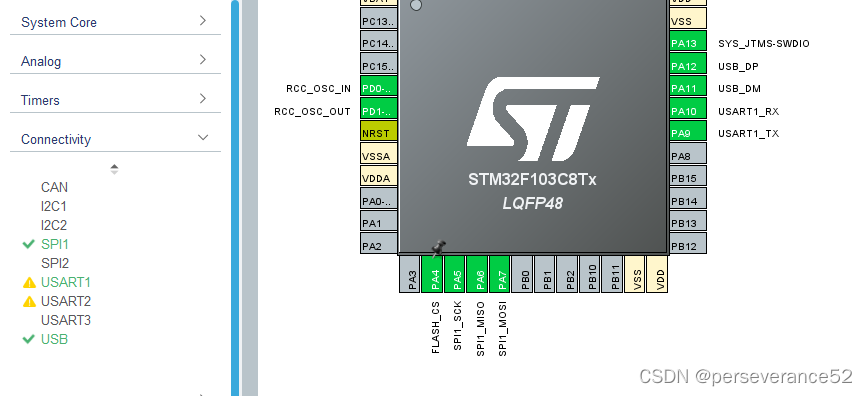
🌿stm32cumx使能对应的SPI接口
-
✨串口非必须,只是方便调试时查看读取是否支持。
-
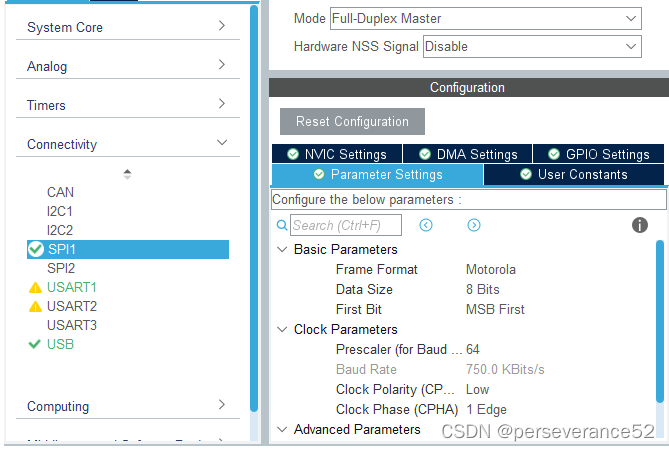
🌿使能SPI接口:(尽量将SPI速度配置低一点,防止访问和写入出错)
-
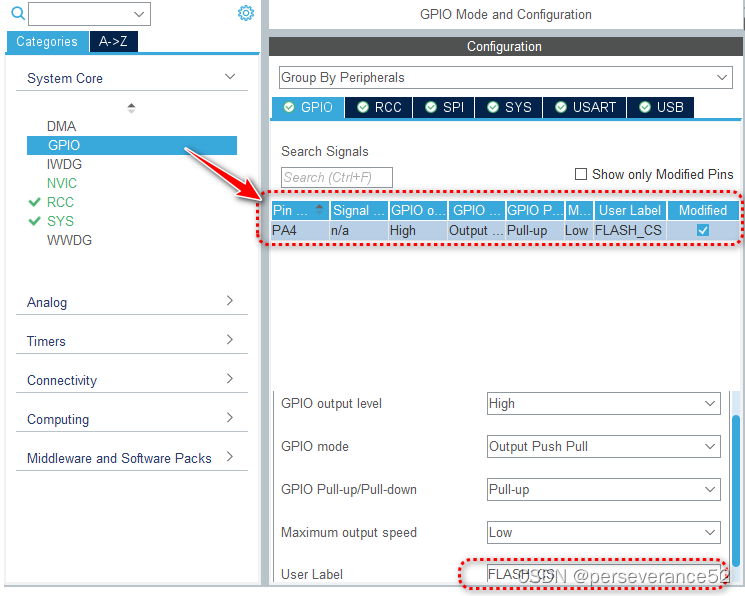
🌿配置SPI CS(片选)引脚:
-
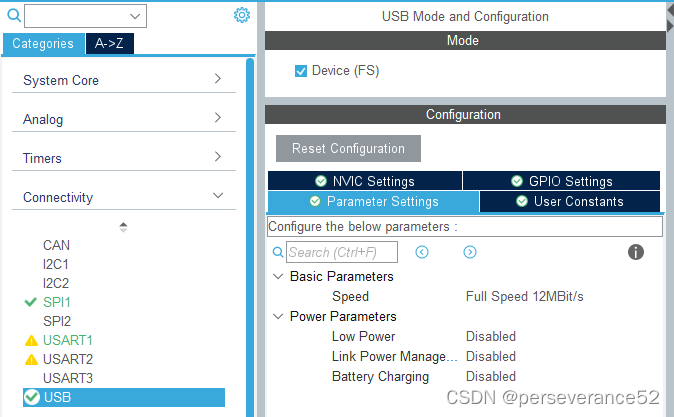
🌿使能USB外设:
-
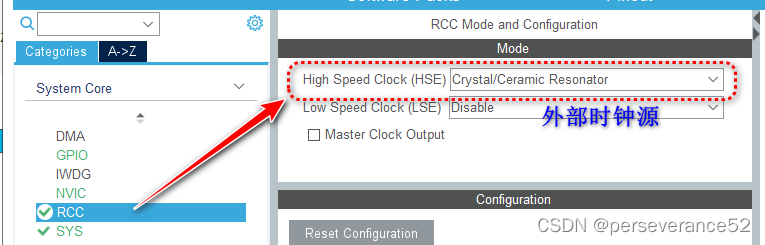
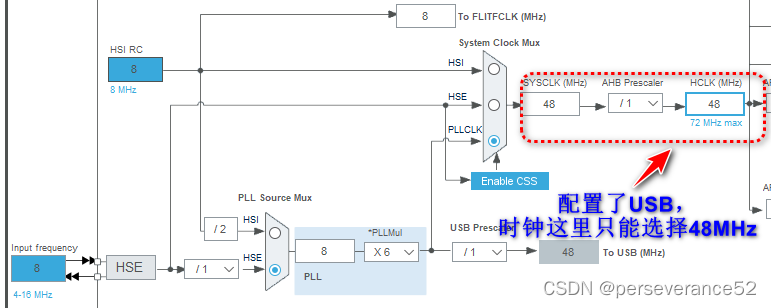
🌿时钟配置为48MHz:
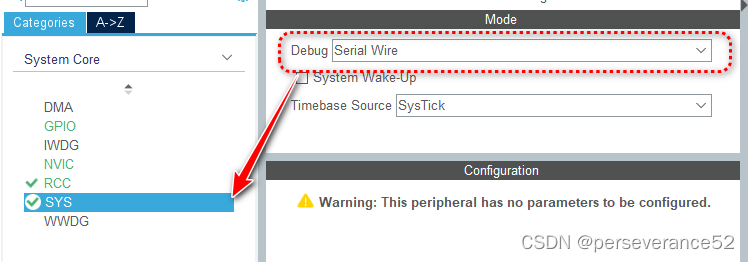
- 🌿使能调试接口
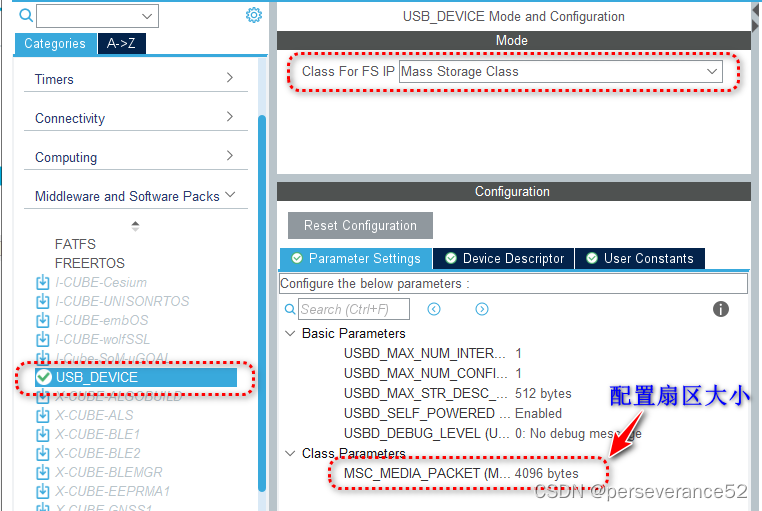
- 🌿勾选中间件:
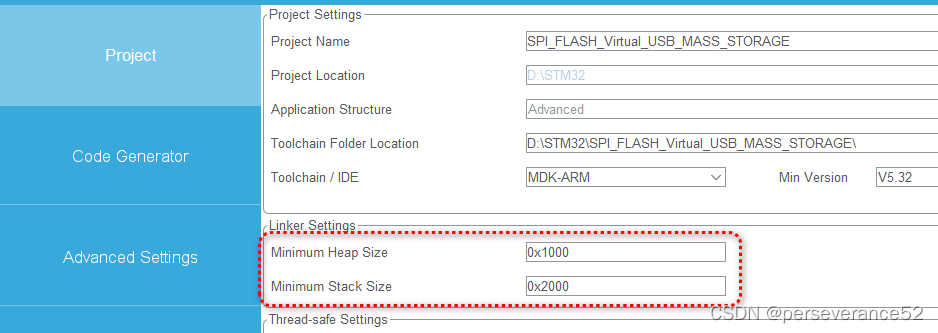
- 🌿调整堆栈区大小:
🛠Keil工程修改
- 🌿导入驱动文件:
bsp_spi_flash.c和bsp_spi_flash.h到工程对应文件夹下:
- 🌿修改
usbd_storage_if.c文件内容:
/* USER CODE BEGIN INCLUDE */
#include "bsp_spi_flash.h" //将驱动头文件包含进来
/* USER CODE END INCLUDE */
//注释掉自动生成的以下3个宏定义
//#define STORAGE_LUN_NBR 1
//#define STORAGE_BLK_NBR 0x10000
//#define STORAGE_BLK_SIZ 0x200
/* USER CODE BEGIN PRIVATE_DEFINES */
//重新定义以下3个宏
#define STORAGE_LUN_NBR 1
#define STORAGE_BLK_NBR 2048 //块数量:256*8扇区=8MByte
#define STORAGE_BLK_SIZ 4096 //每个扇区4096Byte
/* USER CODE END PRIVATE_DEFINES */
- ✨这里的
STORAGE_BLK_NBR宏代表,外部SPI FLASH 容量大小,2048代表为8MB,如果spi flash容量为16MB,那么这里就是4096.以此类推,4MB spi flash就是1024
- 📑补充以下函数内容:(
usbd_storage_if.c文件内)
int8_t STORAGE_Init_FS(uint8_t lun)
{
/* USER CODE BEGIN 2 */
W25QXX_Init();
return (USBD_OK);
/* USER CODE END 2 */
}
int8_t STORAGE_GetCapacity_FS(uint8_t lun, uint32_t *block_num, uint16_t *block_size)
{
/* USER CODE BEGIN 3 */
*block_num = STORAGE_BLK_NBR;
*block_size = STORAGE_BLK_SIZ;
return (USBD_OK);
/* USER CODE END 3 */
}
int8_t STORAGE_IsReady_FS(uint8_t lun)
{
/* USER CODE BEGIN 4 */
u16 flash_ID;
flash_ID =W25QXX_ReadID();
printf("flash_ID:%d \r\n",flash_ID);//非必须,如需要调试,包含stdio.h头文件,启用串口
return (USBD_OK);
/* USER CODE END 4 */
}
int8_t STORAGE_Read_FS(uint8_t lun, uint8_t *buf, uint32_t blk_addr, uint16_t blk_len)
{
/* USER CODE BEGIN 6 */
blk_addr += SPI_FLASH_START_SECTOR;
SPI_FLASH_BufferRead(buf, blk_addr * SPI_FLASH_SECTOR_SIZE, blk_len * SPI_FLASH_SECTOR_SIZE);
return (USBD_OK);
/* USER CODE END 6 */
}
int8_t STORAGE_Write_FS(uint8_t lun, uint8_t *buf, uint32_t blk_addr, uint16_t blk_len)
{
/* USER CODE BEGIN 7 */
uint32_t write_addr;
blk_addr +=SPI_FLASH_START_SECTOR;
write_addr = blk_addr * SPI_FLASH_SECTOR_SIZE;
SPI_FLASH_SectorErase(write_addr);
SPI_FLASH_BufferWrite((uint8_t*)buf, write_addr, blk_len * SPI_FLASH_SECTOR_SIZE);
return (USBD_OK);
/* USER CODE END 7 */
}
int8_t STORAGE_GetMaxLun_FS(void)
{
/* USER CODE BEGIN 8 */
return (STORAGE_LUN_NBR - 1);
/* USER CODE END 8 */
}
- main.c文件
/* USER CODE BEGIN Includes */
#include "bsp_spi_flash.h"
#include "stdio.h"//用于调试串口输出
/* USER CODE END Includes */
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_SPI1_Init();
MX_USB_DEVICE_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
W25QXX_Init();//初始化
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
📝驱动文件
- 📗
bsp_spi_flash.h内容
#ifndef __SPI_FLASH_H
#define __SPI_FLASH_H
#include "stm32f1xx.h"
#include "stm32f1xx_hal_spi.h"
/* ???????? ----------------------------------------------------------------*/
#include "stm32f1xx_hal.h"
typedef uint32_t u32;
typedef uint8_t u8;//
typedef uint16_t u16;
#define SPI_FLASH_REBUILD 0 //1:???????????Flash??0??????????????Flash
#define SPI_FLASH_SECTOR_SIZE 4096 // ????Flash????????
#define SPI_FLASH_START_SECTOR 256*4 // ????Flash?????FatFS?????
#define SPI_FLASH_SECTOR_COUNT 256 // ????Flash?????FatFS???????????
//W25X/Q不同容量对应不同ID关系
//W25Q80 ID 0XEF13
//W25Q16 ID 0XEF14
//W25Q32 ID 0XEF15
//W25Q64 ID 0XEF16
//W25Q128 ID 0XEF17
//W25Q256 ID 0XEF18
//#define W25Q80 0XEF13
//#define W25Q16 0XEF14
//#define W25Q32 0XEF15
#define W25Q64 0XEF16
//#define W25Q128 0XEF17
//#define W25Q256 0XEF18
//#define sFLASH_ID 0XEF4017 //W25Q64
#define sFLASH_ID 0XEF16
extern SPI_HandleTypeDef hspi1;
extern u16 W25QXX_TYPE; //????W25QXX??????
//#define W25QXX_CS PBout(12) //W25QXX片选引脚
#define W25QXX_CS_1 HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_SET)
#define W25QXX_CS_0 HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_RESET)
#define W25X_WriteEnable 0x06
#define W25X_WriteDisable 0x04
#define W25X_ReadStatusReg1 0x05
#define W25X_ReadStatusReg2 0x35
#define W25X_ReadStatusReg3 0x15
#define W25X_WriteStatusReg1 0x01
#define W25X_WriteStatusReg2 0x31
#define W25X_WriteStatusReg3 0x11
#define W25X_ReadData 0x03
#define W25X_FastReadData 0x0B
#define W25X_FastReadDual 0x3B
#define W25X_PageProgram 0x02
#define W25X_BlockErase 0xD8
#define W25X_SectorErase 0x20
#define W25X_ChipErase 0xC7
#define W25X_PowerDown 0xB9
#define W25X_ReleasePowerDown 0xAB
#define W25X_DeviceID 0xAB
#define W25X_ManufactDeviceID 0x90
#define W25X_JedecDeviceID 0x9F
#define W25X_Enable4ByteAddr 0xB7
#define W25X_Exit4ByteAddr 0xE9
void W25QXX_Init(void);
u16 W25QXX_ReadID(void); //???FLASH ID
void W25QXX_WAKEUP(void); //????
void SPI_FLASH_SectorErase(u32 SectorAddr);
void SPI_FLASH_BufferWrite(u8* pBuffer, u32 WriteAddr, u16 NumByteToWrite);
void SPI_FLASH_BufferRead(u8* pBuffer, u32 ReadAddr, u16 NumByteToRead);
void SPI_FLASH_PageWrite(u8* pBuffer, u32 WriteAddr, u16 NumByteToWrite);
#endif /* __SPI_FLASH_H */
- 📓
bsp_spi_flash.c内容
#include "bsp_spi_flash.h"
//需要重新添加代码
#include "stm32f1xx_hal_gpio.h"
#include "stdio.h"
u16 W25QXX_TYPE = W25Q64; //设置SPI存储器型号
extern SPI_HandleTypeDef hspi1;
u8 W25QXX_ReadSR(u8 regno); //??????????
void W25QXX_4ByteAddr_Enable(void); //???4???????
void W25QXX_Write_SR(u8 regno,u8 sr); //?????????
void W25QXX_Write_Enable(void); //?????
void W25QXX_Write_Disable(void); //??????
void W25QXX_Write_NoCheck(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite);
void W25QXX_Read(u8* pBuffer,u32 ReadAddr,u16 NumByteToRead); //???flash
void W25QXX_Write(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite);//????flash
void W25QXX_Erase_Chip(void); //???????
void W25QXX_Erase_Sector(u32 Dst_Addr); //????????
void W25QXX_Wait_Busy(void); //???????
void W25QXX_PowerDown(void); //?????????
//SPI1 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u8 SPI2_ReadWriteByte(u8 TxData)
{
u8 Rxdata;
HAL_SPI_TransmitReceive(&hspi1,&TxData,&Rxdata,1, 1000);
return Rxdata; //返回收到的数据
}
void SPI2_SetSpeed(u8 SPI_BaudRatePrescaler)
{
assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));//判断有效性
__HAL_SPI_DISABLE(&hspi1); //关闭SPI
hspi1.Instance->CR1&=0XFFC7; //位3-5清零,用来设置波特率
hspi1.Instance->CR1|=SPI_BaudRatePrescaler;//设置SPI速度
__HAL_SPI_ENABLE(&hspi1); //使能SPI
}
//初始化SPI FLASH的IO口
void W25QXX_Init(void)
{
u8 temp;
GPIO_InitTypeDef GPIO_Initure;
// __HAL_RCC_GPIOB_CLK_ENABLE(); //使能GPIOB时钟
__HAL_RCC_GPIOA_CLK_ENABLE(); //使能GPIOB时钟
//PA4
GPIO_Initure.Pin=GPIO_PIN_4; //PA4
GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; //推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_FREQ_HIGH;//高速
HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化
W25QXX_CS_1; //SPI FLASH不选中
// SPI2_Init(); //初始化SPI
SPI2_SetSpeed(SPI_BAUDRATEPRESCALER_2); //设置为42M时钟,高速模式
W25QXX_TYPE = W25QXX_ReadID(); //读取FLASH ID.
printf("flash_ID:%d \r\n",W25QXX_TYPE);
// if(W25QXX_TYPE==W25Q64) //SPI FLASH为W25Q32
// {
temp=W25QXX_ReadSR(3); //读取状态寄存器3,判断地址模式
if((temp&0X01)==0) //如果不是4字节地址模式,则进入4字节地址模式
{
W25QXX_CS_0; //选中
SPI2_ReadWriteByte(W25X_Enable4ByteAddr);//发送进入4字节地址模式指令
W25QXX_CS_1; //取消片选
}
// }
}
//读取W25QXX的状态寄存器,W25QXX一共有3个状态寄存器
//状态寄存器1:
//BIT7 6 5 4 3 2 1 0
//SPR RV TB BP2 BP1 BP0 WEL BUSY
//SPR:默认0,状态寄存器保护位,配合WP使用
//TB,BP2,BP1,BP0:FLASH区域写保护设置
//WEL:写使能锁定
//BUSY:忙标记位(1,忙;0,空闲)
//默认:0x00
//状态寄存器2:
//BIT7 6 5 4 3 2 1 0
//SUS CMP LB3 LB2 LB1 (R) QE SRP1
//状态寄存器3:
//BIT7 6 5 4 3 2 1 0
//HOLD/RST DRV1 DRV0 (R) (R) WPS ADP ADS
//regno:状态寄存器号,范:1~3
//返回值:状态寄存器值
u8 W25QXX_ReadSR(u8 regno)
{
u8 byte=0,command=0;
switch(regno)
{
case 1:
command=W25X_ReadStatusReg1; //读状态寄存器1指令
break;
case 2:
command=W25X_ReadStatusReg2; //读状态寄存器2指令
break;
case 3:
command=W25X_ReadStatusReg3; //读状态寄存器3指令
break;
default:
command=W25X_ReadStatusReg1;
break;
}
W25QXX_CS_0; //使能器件
SPI2_ReadWriteByte(command); //发送读取状态寄存器命令
byte=SPI2_ReadWriteByte(0Xff); //读取一个字节
W25QXX_CS_1; //取消片选
return byte;
}
//写W25QXX状态寄存器
void W25QXX_Write_SR(u8 regno,u8 sr)
{
u8 command=0;
switch(regno)
{
case 1:
command=W25X_WriteStatusReg1; //写状态寄存器1指令
break;
case 2:
command=W25X_WriteStatusReg2; //写状态寄存器2指令
break;
case 3:
command=W25X_WriteStatusReg3; //写状态寄存器3指令
break;
default:
command=W25X_WriteStatusReg1;
break;
}
W25QXX_CS_0; //使能器件
SPI2_ReadWriteByte(command); //发送写取状态寄存器命令
SPI2_ReadWriteByte(sr); //写入一个字节
W25QXX_CS_1; //取消片选
}
//W25QXX写使能
//将WEL置位
void W25QXX_Write_Enable(void)
{
W25QXX_CS_0; //使能器件
SPI2_ReadWriteByte(W25X_WriteEnable); //发送写使能
W25QXX_CS_1; //取消片选
}
//W25QXX写禁止
//将WEL清零
void W25QXX_Write_Disable(void)
{
W25QXX_CS_0; //使能器件
SPI2_ReadWriteByte(W25X_WriteDisable); //发送写禁止指令
W25QXX_CS_1; //取消片选
}
//读取芯片ID
//返回值如下:
//0XEF13,表示芯片型号为W25Q80
//0XEF14,表示芯片型号为W25Q16
//0XEF15,表示芯片型号为W25Q32
//0XEF16,表示芯片型号为W25Q64
//0XEF17,表示芯片型号为W25Q128
//0XEF18,表示芯片型号为W25Q256
u16 W25QXX_ReadID(void)
{
u16 Temp = 0;
W25QXX_CS_0;
SPI2_ReadWriteByte(0x90);//发送读取ID命令
SPI2_ReadWriteByte(0x00);
SPI2_ReadWriteByte(0x00);
SPI2_ReadWriteByte(0x00);
Temp|=SPI2_ReadWriteByte(0xFF)<<8;
Temp|=SPI2_ReadWriteByte(0xFF);
W25QXX_CS_1;
return Temp;
}
//读取SPI FLASH
//在指定地址开始读取指定长度的数据
//pBuffer:数据存储区
//ReadAddr:开始读取的地址(24bit)
//NumByteToRead:要读取的字节数(最大65535)
void W25QXX_Read(u8* pBuffer,u32 ReadAddr,u16 NumByteToRead)
{
u16 i;
W25QXX_CS_0; //使能器件
SPI2_ReadWriteByte(W25X_ReadData); //发送读取命令
// if(W25QXX_TYPE == W25Q256) //如果是W25Q256的话地址为4字节的,要发送最高8位
// {
// SPI2_ReadWriteByte((u8)((ReadAddr)>>24));
// }
SPI2_ReadWriteByte((u8)((ReadAddr)>>16)); //发送24bit地址
SPI2_ReadWriteByte((u8)((ReadAddr)>>8));
SPI2_ReadWriteByte((u8)ReadAddr);
for(i=0;i<NumByteToRead;i++)
{
pBuffer[i]=SPI2_ReadWriteByte(0XFF); //循环读数
}
W25QXX_CS_1;
}
/**
* @brief 读取FLASH数据
* @param pBuffer,存储读出数据的指针
* @param ReadAddr,读取地址
* @param NumByteToRead,读取数据长度
* @retval 无
*/
void SPI_FLASH_BufferRead(u8* pBuffer, u32 ReadAddr, u16 NumByteToRead)
{
/* 选择FLASH: CS低电平 */
W25QXX_CS_0;
/* 发送 读 指令 */
SPI2_ReadWriteByte(W25X_ReadData);
/* 发送 读 地址高位 */
SPI2_ReadWriteByte((ReadAddr & 0xFF0000) >> 16);
/* 发送 读 地址中位 */
SPI2_ReadWriteByte((ReadAddr& 0xFF00) >> 8);
/* 发送 读 地址低位 */
SPI2_ReadWriteByte(ReadAddr & 0xFF);
/* 读取数据 */
while (NumByteToRead--) /* while there is data to be read */
{
/* 读取一个字节*/
*pBuffer = SPI2_ReadWriteByte(0xFF);
/* 指向下一个字节缓冲区 */
pBuffer++;
}
/* 停止信号 FLASH: CS 高电平 */
W25QXX_CS_1;
}
#define WIP_Flag 0x01
/**
* @brief 等待WIP(BUSY)标志被置0,即等待到FLASH内部数据写入完毕
* @param none
* @retval none
*/
void SPI_FLASH_WaitForWriteEnd(void)
{
u8 FLASH_Status = 0;
/* 选择 FLASH: CS 低 */
W25QXX_CS_0;
/* 发送 读状态寄存器 命令 */
SPI2_ReadWriteByte(W25X_ReadStatusReg1);
/* 若FLASH忙碌,则等待 */
do
{
/* 读取FLASH芯片的状态寄存器 */
FLASH_Status = SPI2_ReadWriteByte(0xFF);
}
while ((FLASH_Status & WIP_Flag) == SET); /* 正在写入标志 */
/* 停止信号 FLASH: CS 高 */
W25QXX_CS_1;
}
/**
* @brief 擦除FLASH扇区
* @param SectorAddr:要擦除的扇区地址
* @retval 无
*/
void SPI_FLASH_SectorErase(u32 SectorAddr)
{
/* 发送FLASH写使能命令 */
W25QXX_Write_Enable();
SPI_FLASH_WaitForWriteEnd();
/* 擦除扇区 */
/* 选择FLASH: CS低电平 */
W25QXX_CS_0;
/* 发送扇区擦除指令*/
SPI2_ReadWriteByte(W25X_SectorErase);
/*发送擦除扇区地址的高位*/
SPI2_ReadWriteByte((u8)((SectorAddr)>>16)); //发送24bit地址
SPI2_ReadWriteByte((u8)((SectorAddr)>>8));
/* 发送擦除扇区地址的低位 */
SPI2_ReadWriteByte(SectorAddr & 0xFF);
/* 停止信号 FLASH: CS 高电平 */
W25QXX_CS_1;
/* 等待擦除完毕*/
SPI_FLASH_WaitForWriteEnd();
}
/* WIP(busy)标志,FLASH内部正在写入 */
#define SPI_FLASH_PageSize 256
#define SPI_FLASH_PerWritePageSize 256
/**
* @brief 对FLASH按页写入数据,调用本函数写入数据前需要先擦除扇区
* @param pBuffer,要写入数据的指针
* @param WriteAddr,写入地址
* @param NumByteToWrite,写入数据长度,必须小于等于SPI_FLASH_PerWritePageSize
* @retval 无
*/
void SPI_FLASH_PageWrite(u8* pBuffer, u32 WriteAddr, u16 NumByteToWrite)
{
/* 发送FLASH写使能命令 */
W25QXX_Write_Enable();
/* 选择FLASH: CS低电平 */
W25QXX_CS_0;
/* 写页写指令*/
SPI2_ReadWriteByte(W25X_PageProgram);
/*发送写地址的高位*/
SPI2_ReadWriteByte((WriteAddr & 0xFF0000) >> 16);
/*发送写地址的中位*/
SPI2_ReadWriteByte((WriteAddr & 0xFF00) >> 8);
/*发送写地址的低位*/
SPI2_ReadWriteByte(WriteAddr & 0xFF);
if(NumByteToWrite > SPI_FLASH_PageSize)
{
NumByteToWrite = SPI_FLASH_PerWritePageSize;
//FLASH_ERROR("SPI_FLASH_PageWrite too large!");
}
/* 写入数据*/
while (NumByteToWrite--)
{
/* 发送当前要写入的字节数据 */
SPI2_ReadWriteByte(*pBuffer);
/* 指向下一字节数据 */
pBuffer++;
}
/* 停止信号 FLASH: CS 高电平 */
W25QXX_CS_1;
/* 等待写入完毕*/
SPI_FLASH_WaitForWriteEnd();
}
//SPI在一页(0~65535)内写入少于256个字节的数据
//在指定地址开始写入最大256字节的数据
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大256),该数不应该超过该页的剩余字节数!!!
void W25QXX_Write_Page(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite)
{
u16 i;
W25QXX_Write_Enable(); //SET WEL
W25QXX_CS_0; //使能器件
SPI2_ReadWriteByte(W25X_PageProgram); //发送写页命令
// if(W25QXX_TYPE==W25Q256) //如果是W25Q256的话地址为4字节的,要发送最高8位
// {
// SPI2_ReadWriteByte((u8)((WriteAddr)>>24));
// }
SPI2_ReadWriteByte((u8)((WriteAddr)>>16)); //发送24bit地址
SPI2_ReadWriteByte((u8)((WriteAddr)>>8));
SPI2_ReadWriteByte((u8)WriteAddr);
for(i=0;i<NumByteToWrite;i++)SPI2_ReadWriteByte(pBuffer[i]);//循环写数
W25QXX_CS_1; //取消片选
SPI_FLASH_WaitForWriteEnd(); //等待写入结束
}
/**
* @brief 对FLASH写入数据,调用本函数写入数据前需要先擦除扇区
* @param pBuffer,要写入数据的指针
* @param WriteAddr,写入地址
* @param NumByteToWrite,写入数据长度
* @retval 无
*/
void SPI_FLASH_BufferWrite(u8* pBuffer, u32 WriteAddr, u16 NumByteToWrite)
{
u8 NumOfPage = 0, NumOfSingle = 0, Addr = 0, count = 0, temp = 0;
/*mod运算求余,若writeAddr是SPI_FLASH_PageSize整数倍,运算结果Addr值为0*/
Addr = WriteAddr % SPI_FLASH_PageSize;
/*差count个数据值,刚好可以对齐到页地址*/
count = SPI_FLASH_PageSize - Addr;
/*计算出要写多少整数页*/
NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;
/*mod运算求余,计算出剩余不满一页的字节数*/
NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;
/* Addr=0,则WriteAddr 刚好按页对齐 aligned */
if (Addr == 0)
{
/* NumByteToWrite < SPI_FLASH_PageSize */
if (NumOfPage == 0)
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite);
}
else /* NumByteToWrite > SPI_FLASH_PageSize */
{
/*先把整数页都写了*/
while (NumOfPage--)
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, SPI_FLASH_PageSize);
WriteAddr += SPI_FLASH_PageSize;
pBuffer += SPI_FLASH_PageSize;
}
/*若有多余的不满一页的数据,把它写完*/
SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumOfSingle);
}
}
/* 若地址与 SPI_FLASH_PageSize 不对齐 */
else
{
/* NumByteToWrite < SPI_FLASH_PageSize */
if (NumOfPage == 0)
{
/*当前页剩余的count个位置比NumOfSingle小,一页写不完*/
if (NumOfSingle > count)
{
temp = NumOfSingle - count;
/*先写满当前页*/
SPI_FLASH_PageWrite(pBuffer, WriteAddr, count);
WriteAddr += count;
pBuffer += count;
/*再写剩余的数据*/
SPI_FLASH_PageWrite(pBuffer, WriteAddr, temp);
}
else /*当前页剩余的count个位置能写完NumOfSingle个数据*/
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite);
}
}
else /* NumByteToWrite > SPI_FLASH_PageSize */
{
/*地址不对齐多出的count分开处理,不加入这个运算*/
NumByteToWrite -= count;
NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;
NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;
/* 先写完count个数据,为的是让下一次要写的地址对齐 */
SPI_FLASH_PageWrite(pBuffer, WriteAddr, count);
/* 接下来就重复地址对齐的情况 */
WriteAddr += count;
pBuffer += count;
/*把整数页都写了*/
while (NumOfPage--)
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, SPI_FLASH_PageSize);
WriteAddr += SPI_FLASH_PageSize;
pBuffer += SPI_FLASH_PageSize;
}
/*若有多余的不满一页的数据,把它写完*/
if (NumOfSingle != 0)
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumOfSingle);
}
}
}
}
//无检验写SPI FLASH
//必须确保所写的地址范围内的数据全部为0XFF,否则在非0XFF处写入的数据将失败!
//具有自动换页功能
//在指定地址开始写入指定长度的数据,但是要确保地址不越界!
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大65535)
//CHECK OK
void W25QXX_Write_NoCheck(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite)
{
u16 pageremain;
pageremain=256-WriteAddr%256; //单页剩余的字节数
if(NumByteToWrite<=pageremain)pageremain=NumByteToWrite;//不大于256个字节
while(1)
{
W25QXX_Write_Page(pBuffer,WriteAddr,pageremain);
if(NumByteToWrite==pageremain)break;//写入结束了
else //NumByteToWrite>pageremain
{
pBuffer+=pageremain;
WriteAddr+=pageremain;
NumByteToWrite-=pageremain; //减去已经写入了的字节数
if(NumByteToWrite>256)pageremain=256; //一次可以写入256个字节
else pageremain=NumByteToWrite; //不够256个字节了
}
};
}
//写SPI FLASH
//在指定地址开始写入指定长度的数据
//该函数带擦除操作!
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大65535)
u8 W25QXX_BUFFER[4096];
void W25QXX_Write(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite)
{
u32 secpos;
u16 secoff;
u16 secremain;
u16 i;
u8 * W25QXX_BUF;
W25QXX_BUF=W25QXX_BUFFER;
secpos=WriteAddr/4096;//扇区地址
secoff=WriteAddr%4096;//在扇区内的偏移
secremain=4096-secoff;//扇区剩余空间大小
//printf("ad:%X,nb:%X\r\n",WriteAddr,NumByteToWrite);//测试用
if(NumByteToWrite<=secremain)secremain=NumByteToWrite;//不大于4096个字节
while(1)
{
W25QXX_Read(W25QXX_BUF,secpos*4096,4096);//读出整个扇区的内容
for(i=0;i<secremain;i++)//校验数据
{
if(W25QXX_BUF[secoff+i]!=0XFF)break;//需要擦除
}
if(i<secremain)//需要擦除
{
W25QXX_Erase_Sector(secpos);//擦除这个扇区
for(i=0;i<secremain;i++) //复制
{
W25QXX_BUF[i+secoff]=pBuffer[i];
}
W25QXX_Write_NoCheck(W25QXX_BUF,secpos*4096,4096);//写入整个扇区
}else W25QXX_Write_NoCheck(pBuffer,WriteAddr,secremain);//写已经擦除了的,直接写入扇区剩余区间.
if(NumByteToWrite==secremain)break;//写入结束了
else//写入未结束
{
secpos++;//扇区地址增1
secoff=0;//偏移位置为0
pBuffer+=secremain; //指针偏移
WriteAddr+=secremain;//写地址偏移
NumByteToWrite-=secremain; //字节数递减
if(NumByteToWrite>4096)secremain=4096; //下一个扇区还是写不完
else secremain=NumByteToWrite; //下一个扇区可以写完了
}
};
}
//擦除整个芯片
//等待时间超长...
void W25QXX_Erase_Chip(void)
{
W25QXX_Write_Enable(); //SET WEL
W25QXX_Wait_Busy();
W25QXX_CS_0; //使能器件
SPI2_ReadWriteByte(W25X_ChipErase); //发送片擦除命令
W25QXX_CS_1; //取消片选
W25QXX_Wait_Busy(); //等待芯片擦除结束
}
//擦除一个扇区
//Dst_Addr:扇区地址 根据实际容量设置
//擦除一个扇区的最少时间:150ms
void W25QXX_Erase_Sector(u32 Dst_Addr)
{
//监视falsh擦除情况,测试用
//printf("fe:%x\r\n",Dst_Addr);
Dst_Addr*=4096;
W25QXX_Write_Enable(); //SET WEL
W25QXX_Wait_Busy();
W25QXX_CS_0; //使能器件
SPI2_ReadWriteByte(W25X_SectorErase); //发送扇区擦除指令
if(W25QXX_TYPE==W25Q64) //如果是W25Q256的话地址为4字节的,要发送最高8位
{
SPI2_ReadWriteByte((u8)((Dst_Addr)>>24));
}
SPI2_ReadWriteByte((u8)((Dst_Addr)>>16)); //发送24bit地址
SPI2_ReadWriteByte((u8)((Dst_Addr)>>8));
SPI2_ReadWriteByte((u8)Dst_Addr);
W25QXX_CS_1; //取消片选
W25QXX_Wait_Busy(); //等待擦除完成
}
//等待空闲
void W25QXX_Wait_Busy(void)
{
while((W25QXX_ReadSR(1)&0x01)==0x01); // 等待BUSY位清空
}
//进入掉电模式
void W25QXX_PowerDown(void)
{
W25QXX_CS_0; //使能器件
SPI2_ReadWriteByte(W25X_PowerDown); //发送掉电命令
W25QXX_CS_1; //取消片选
//delay_us(3); //等待TPD
}
//唤醒
void W25QXX_WAKEUP(void)
{
W25QXX_CS_0; //使能器件
SPI2_ReadWriteByte(W25X_ReleasePowerDown); // send W25X_PowerDown command 0xAB
W25QXX_CS_1; //取消片选
//delay_us(3); //等待TRES1
}
📚工程源码
链接:https://pan.baidu.com/s/164MW7mOR8fnaHZUC0dt7SQ
提取码:0nei