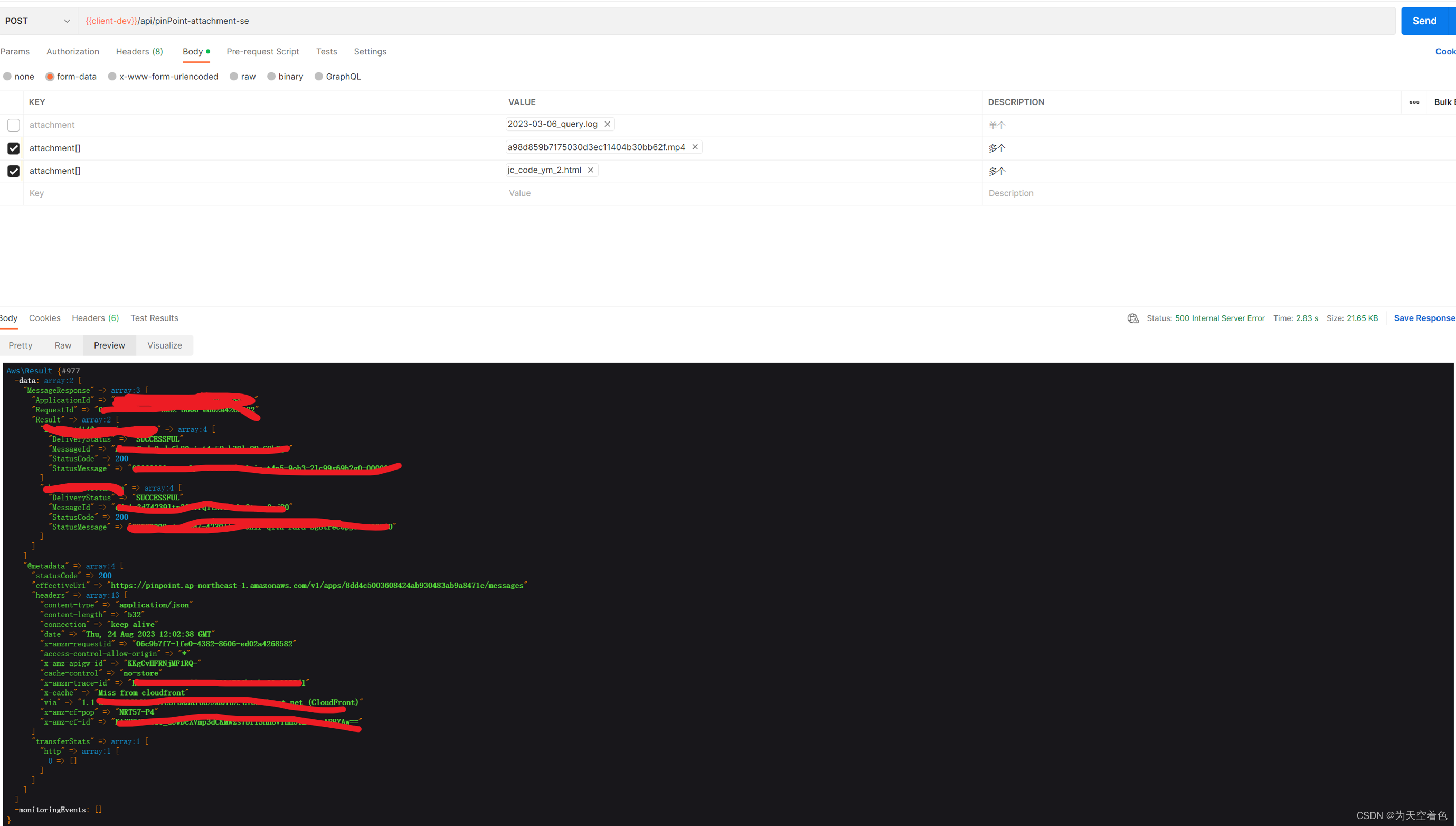
今天在读百度的MPC算法的代码。
研究对象
LQR的研究对象是现代控制理论中以状态空间方程形式给出的线性系统。MPC的研究对象可以是线性系统,也可以是非线性系统,只不过为了某些需求,如时效性,计算的便捷,操控性等,一般会将非线性系统转换为线性系统进行计算。
Apollo中,LQR和MPC控制器都选用的单车动力学模型作为研究对象,单车动力学模型为非线性系统,但LQR和MPC控制器的目的是为了求最优控制解,在具体的优化求解时,均通过线性化方法将状态方程转化为线性方程进行求解,所以,可以说apollo中LQR和MPC控制器的研究对象均为线性系统。
优化目标
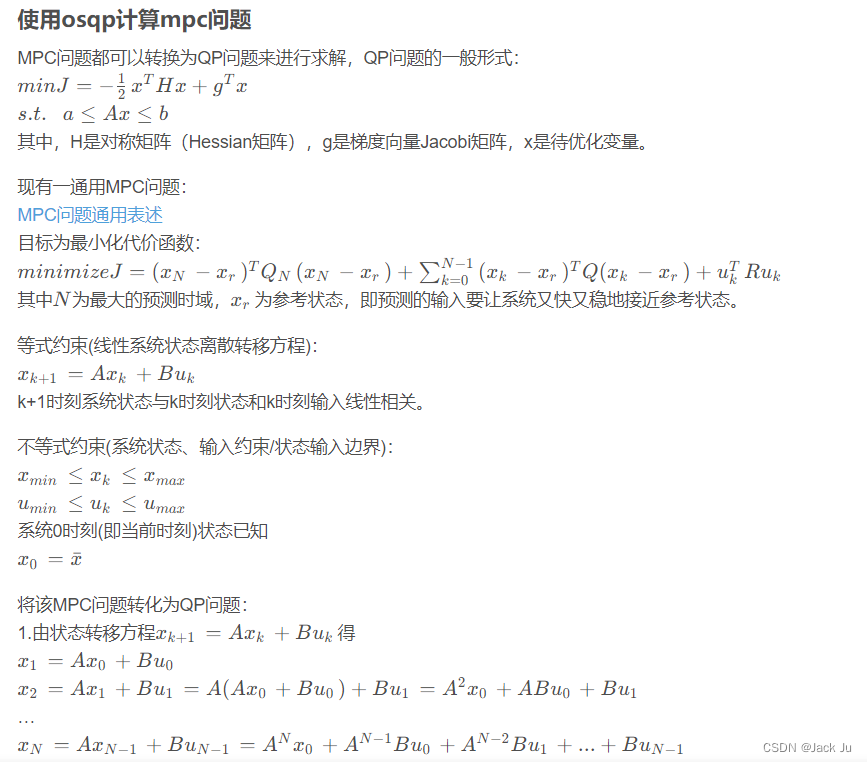
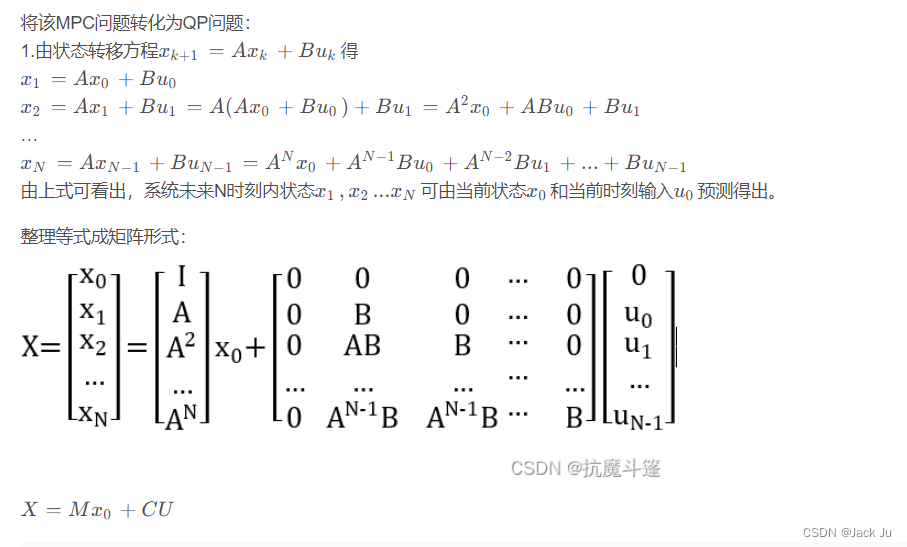
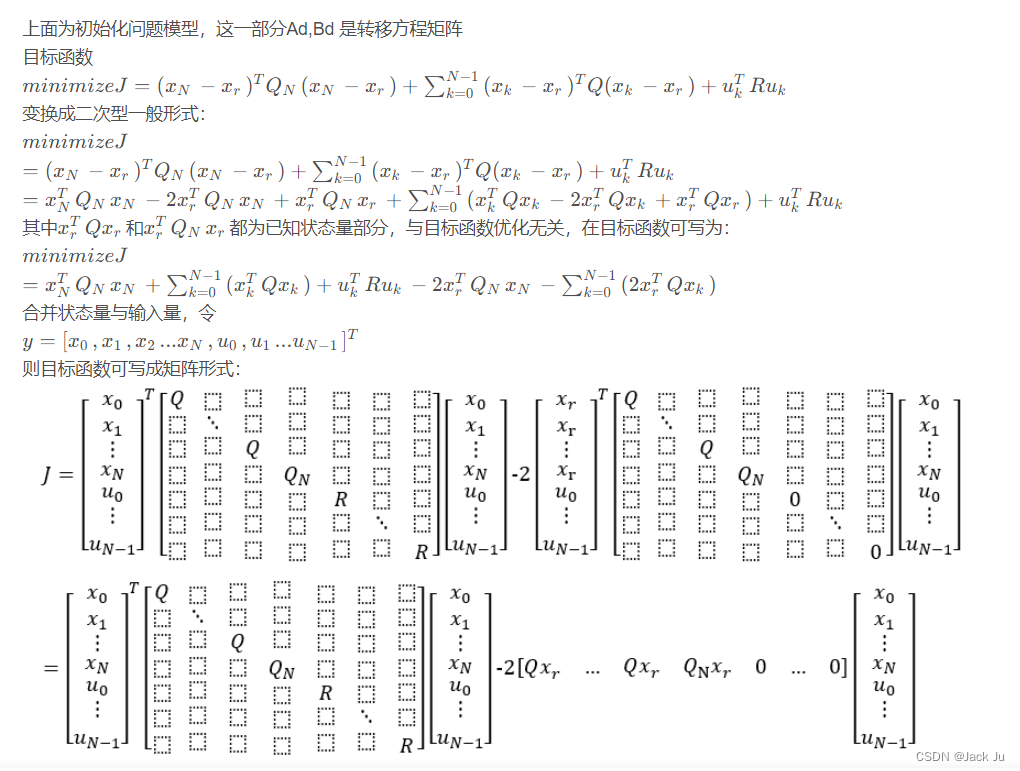

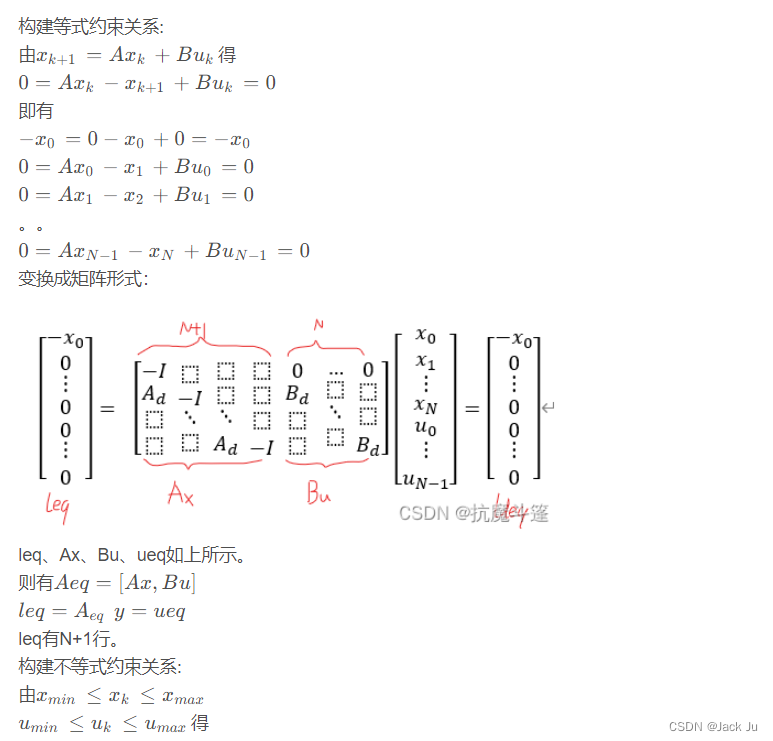
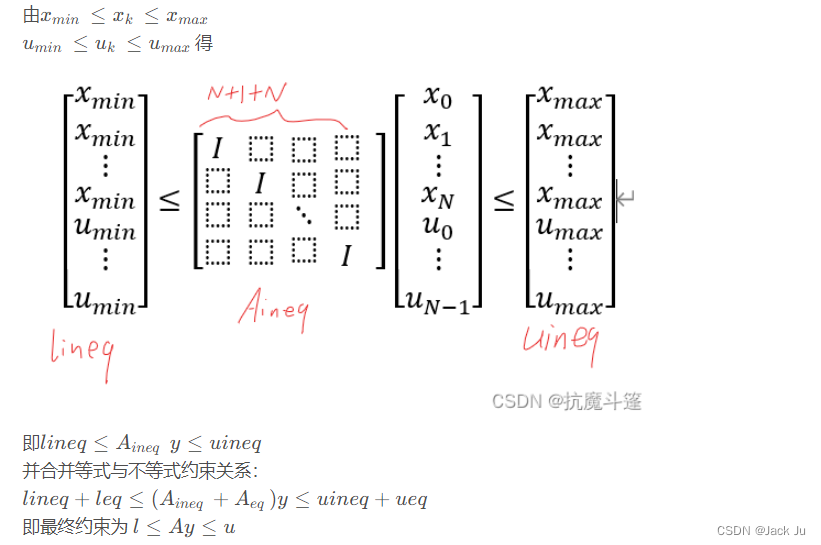
参考:QR、MPC以及osqp库
Apollo MPC横纵向耦合控制学习笔记