--------------------
源码
void sr04_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//打开端口B的硬件时钟,就是供电
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC,ENABLE);
//打开端口E的硬件时钟,就是供电
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //6号引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN; //输入模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_High_Speed;//高速,速度越高,响应越快,但是功耗会更高
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;//不使能上下拉电阻(因为外部已经有上拉电阻)
GPIO_Init(GPIOE,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //6号引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_High_Speed;//高速,速度越高,响应越快,但是功耗会更高
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;//不使能上下拉电阻(因为外部已经有上拉电阻)
GPIO_Init(GPIOC,&GPIO_InitStructure);
//只要有输出模式,肯定会有初始化电平的状态,看连接设备说明书
PCout(7)=0;
}
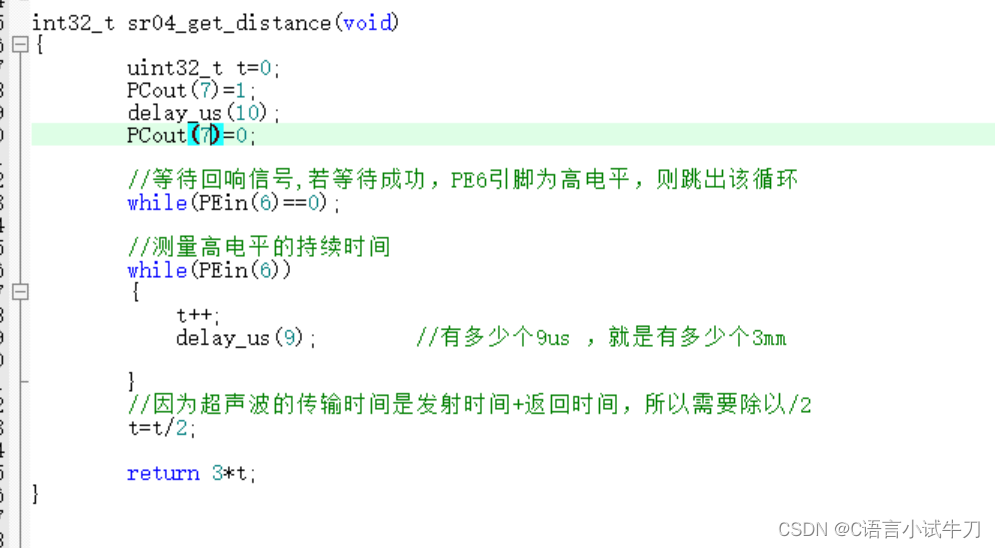
int32_t sr04_get_distance(void)
{
uint32_t t=0;
PCout(7)=1;
delay_us(10);
PCout(7)=0;
//等待回响信号,若等待成功,PE6引脚为高电平,则跳出该循环
while(PEin(6)==0);
//测量高电平的持续时间
while(PEin(6))
{
t++;
delay_us(9); //有多少个9us ,就是有多少个3mm
}
//因为超声波的传输时间是发射时间+返回时间,所以需要除以/2
t=t/2;
return 3*t;
}
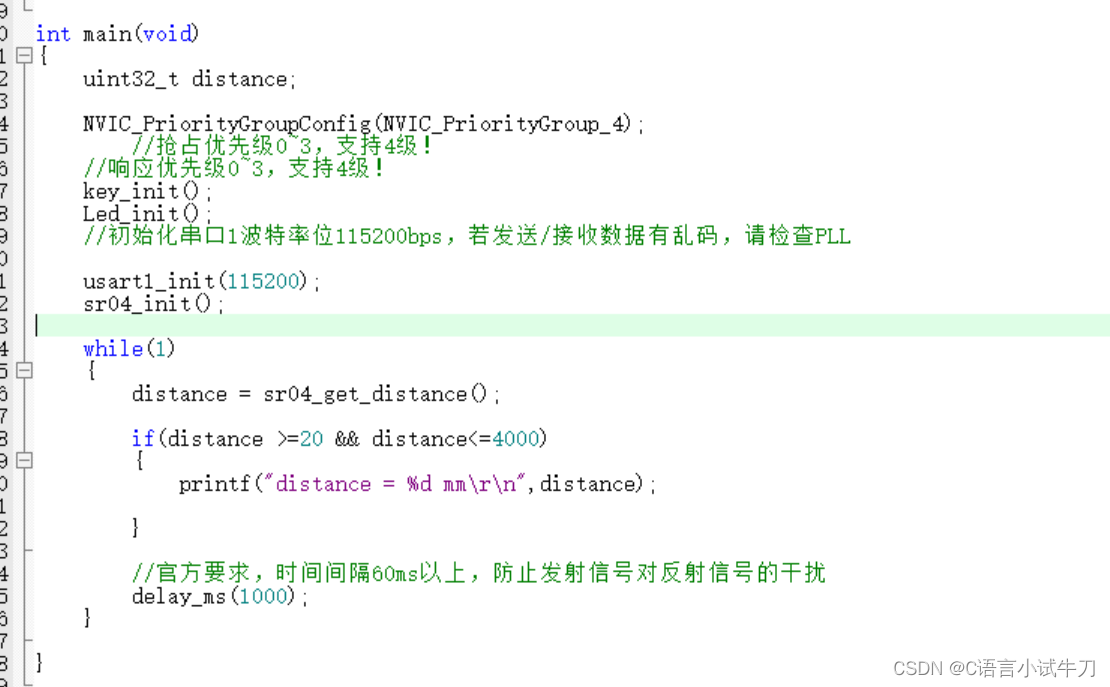
int main(void)
{
uint32_t distance;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
//抢占优先级0~3,支持4级!
//响应优先级0~3,支持4级!
key_init();
Led_init();
//初始化串口1波特率位115200bps,若发送/接收数据有乱码,请检查PLL
usart1_init(115200);
sr04_init();
while(1)
{
distance = sr04_get_distance();
if(distance >=20 && distance<=4000)
{
printf("distance = %d mm\r\n",distance);
}
//官方要求,时间间隔60ms以上,防止发射信号对反射信号的干扰
delay_ms(1000);
}
}








![[MyBatis系列①]增删改查](https://img-blog.csdnimg.cn/24918bba0bce4a75b7e9e3450a0fa036.png)