C++线程库是C++11新增的重要的技术之一,接下来来简单学习一下吧!
thread类常用接口
| 函数名 | 功能 |
| thread() | 构造一个线程对象,没有关联任何线程函数,即没有启动任何线程。 |
| thread(fn, args1, args2, ...) | 构造一个线程对象,并关联线程函数fn,args1,args2,...为线程函数的参数。 |
| get_id() | 获取线程id。 |
| jionable() | 线程是否还在执行,joinable代表的是一个正在执行中的线程。 |
| jion() | 该函数调用后会阻塞住线程,当该线程结束后,主线程继续执行。 |
| detach() | 在创建线程对象后马上调用,用于把被创建线程与线程对象分离开,分离的线程变为后台线程,创建的线程的"死活"就与主线程无关。 |
线程是操作系统中的一个概念,线程对象可以关联一个线程,用来控制线程以及获取线程的状态,当创建一个线程对象后,没有提供线程函数,该对象实际没有对应任何线程:
int main()
{
std::thread t1;
std::cout << t1.get_id() << std::endl;
return 0;
}get_id()的返回值类型为id类型,id类型实际为std::thread命名空间下封装的一个类,该类中包含了一个结构体:
// vs下查看
typedef struct
{ /* thread identifier for Win32 */
void *_Hnd; /* Win32 HANDLE */
unsigned int _Id;
} _Thrd_imp_t;当创建一个线程对象后,并且给线程关联线程函数,该线程就被启动,与主线程一起运行。线程函数一般情况下可按照以下三种方式提供:函数指针、lambda表达式、函数对象。
#include<iostream>
#include<thread>
void ThreadFunc(int a)
{
std::cout << "thread1" << a << std::endl;
}
class TF
{
public:
void operator()()
{
std::cout << "thread3" << std::endl;
}
};
int main()
{
//线程函数为函数指针
std::thread t1(ThreadFunc, 10);
//线程函数为lambda表达式
std::thread t2([] {std::cout << "thread2" << std::endl; });
//线程函数为函数对象
TF tf;
std::thread t3(tf);
t1.join();
t2.join();
t3.join();
std::cout << "Main thread!" << std::endl;
return 0;
}thread类是防拷贝的,不允许拷贝构造以及赋值,但是可以移动构造和移动赋值,即将一个线程对象关联线程的状态转移给其他线程对象,转移期间不意向线程的执行。
可以通过jionable()函数判断线程是否是有效的,如果是以下任意情况,则线程无效:
采用无参构造函数构造的线程对象、线程对象的状态已经转移给其他线程对象、线程已经调用jion或者detach结束。
并发与并行的区别?并发是指多个任务在一时间段内交替执行。并行是指多个任务同时执行,每个任务在独立的处理器上执行。
线程函数参数
线程函数的参数是以值拷贝的方式拷贝到线程栈空间中的,因此:即使线程参数为引用类型,在线程中修改后也不能修改外部实参,因为其实际引用的是线程栈中的拷贝,而不是外部实参。
#include<iostream>
#include<thread>
void threadFunc1(int& x)
{
x += 10;
}
void threadFunc2(int* x)
{
*x += 10;
}
int main()
{
int a = 10;
//在线程函数中对a修改,不会影响外部实参,线程函数参数虽然是引用方式,但其实际引用的是线程栈中的拷贝
std::thread t1(threadFunc1, a);
t1.join();
std::cout << a << std::endl;
// 如果想要通过形参改变外部实参时,必须借助std::ref()函数
std::thread t2(threadFunc1, std::ref(a));
t2.join();
std::cout << a << std::endl;
//地址的拷贝
std::thread t3(threadFunc2, &a);
t3.join();
std::cout << a << std::endl;
return 0;
}注意:如果是类成员函数作为线程参数时,必须将this作为线程函数参数。
原子性操作库(atomic)
多线程最主要的问题是共享数据带来的问题(即线程安全)。如果共享数据都是只读的,那么没问
题,因为只读操作不会影响到数据,更不会涉及对数据的修改,所以所有线程都会获得同样的数
据。但是,当一个或多个线程要修改共享数据时,就会产生很多潜在的麻烦,比如:
#include<iostream>
#include<thread>
unsigned long sum = 0L;
void fun(size_t num)
{
for (size_t i = 0; i < num; ++i)
{
sum++;
}
}
int main()
{
std::cout << "Before joining,sum = " << sum <<std::endl;
std::thread t1(fun, 10000000);
std::thread t2(fun, 10000000);
t1.join();
t2.join();
std::cout << "After joining,sum = " << sum << std::endl;
return 0;
}
C++98中传统的解决方式:可以对共享修改的数据可以加锁保护:
#include<iostream>
#include<mutex>
#include<thread>
unsigned long sum = 0L;
std::mutex _mutex;
void fun(size_t num)
{
for (size_t i = 0; i < num; ++i)
{
_mutex.lock();
sum++;
_mutex.unlock();
}
}
int main()
{
std::cout << "Before joining,sum = " << sum <<std::endl;
std::thread t1(fun, 10000000);
std::thread t2(fun, 10000000);
t1.join();
t2.join();
std::cout << "After joining,sum = " << sum << std::endl;
return 0;
}
虽然加锁可以解决,但是加锁有一个缺陷就是:只要一个线程在对sum++时,其他线程就会被阻塞,会影响程序运行的效率,而且锁如果控制不好,还容易造成死锁。因此C++11中引入了原子操作。所谓原子操作:即不可被中断的一个或一系列操作,C++11引入的原子操作类型,使得线程间数据的同步变得非常高效。需要使用以上原子操作变量时,必须添加头文件#include<atomic>。
#include<iostream>
#include<thread>
#include<atomic>
std::atomic_long sum{ 0 };
void fun(size_t num)
{
for (size_t i = 0; i < num; ++i)
{
sum++;
}
}
int main()
{
std::cout << "Before joining,sum = " << sum <<std::endl;
std::thread t1(fun, 10000000);
std::thread t2(fun, 10000000);
t1.join();
t2.join();
std::cout << "After joining,sum = " << sum << std::endl;
return 0;
}
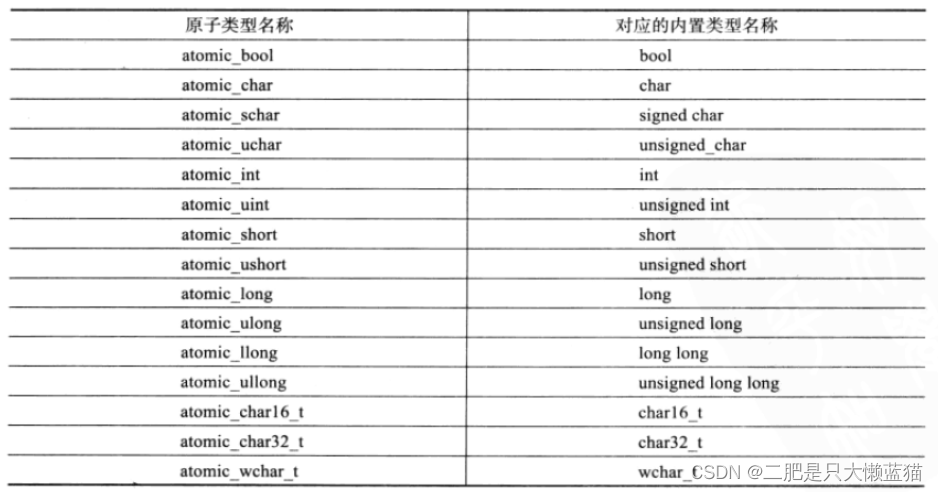
可以看到,在C++11中,程序员不需要对原子类型变量进行加锁解锁操作,线程能够对原子类型变量互斥的访问,更为普遍的,程序员可以使用atomic类模板,定义出需要的任意原子类型:
atmoic<T> t; // 声明一个类型为T的原子类型变量t注意:原子类型通常属于"资源型"数据,多个线程只能访问单个原子类型的拷贝,因此在C++11
中,原子类型只能从其模板参数中进行构造,不允许原子类型进行拷贝构造、移动构造以及
operator=等,为了防止意外,标准库已经将atmoic模板类中的拷贝构造、移动构造、赋值运算符重载默认删除掉了。
#include <atomic>
int main()
{
atomic<int> a1(0);
//atomic<int> a2(a1); // 编译失败
atomic<int> a2(0);
//a2 = a1; // 编译失败
return 0;
}lock_guard与unique_lock
在多线程环境下,如果想要保证某个变量的安全性,只要将其设置成对应的原子类型即可,即高效又不容易出现死锁问题。但是有些情况下,我们可能需要保证一段代码的安全性,那么就只能通过锁的方式来进行控制。
比如:一个线程对变量number进行加一100次,另外一个减一100次,每次操作加一或者减一之
后,输出number的结果,要求:number最后的值为1。
#include<iostream>
#include<mutex>
#include<thread>
#include<atomic>
std::mutex _mutex;
int number = 0;
void threadAdd()
{
for (int i = 0; i < 100; ++i)
{
_mutex.lock();
++number;
std::cout << "thread 1: " << number << std::endl;
_mutex.unlock();
}
}
void threadDel()
{
for (int i = 0; i < 100; ++i)
{
_mutex.lock();
--number;
std::cout << "thread 2: " << number << std::endl;
_mutex.unlock();
}
}
int main()
{
std::thread t1(threadAdd);
std::thread t2(threadDel);
t1.join();
t2.join();
std::cout << "number:" << number << std::endl;
system("pause");
return 0;
}假设线程 t1 先启动,并在执行 _mutex.lock() 之后被线程调度器暂停,此时线程 t2 启动并执行 _mutex.lock()。由于 _mutex 是一个互斥锁,在 t2 执行期间,t1 将会被阻塞,等待 t2 释放 _mutex。
然而,t2 在执行 --number 之后,还没有执行 std::cout 语句,即便它现在想要释放 _mutex,也无法立即释放,因为其他线程正在等待获取该互斥锁。此时,t2 会被线程调度器暂停,t1 仍然无法继续执行。
这样,t1 和 t2 互相等待对方释放互斥锁,形成了死锁状态。没有任何线程能够继续执行,导致程序被死锁。
因此:C++11采用RAII的方式对锁进行了封装,即lock_guard和unique_lock。
mutex的种类
在C++11中,Mutex总共包了四个互斥量的种类:
1.std::mutex
C++11提供的最基本的互斥量,该类的对象之间不能拷贝,也不能进行移动拷贝或赋值。mutex最常用的三个函数:
| 函数名 | 函数功能. |
| lock() | 上锁:锁住互斥量. |
| unlock() | 解锁:释放对互斥量的所有权. |
| try_lock() | 尝试锁住互斥量,如果互斥量被其他线程占有,则当前线程也不会被阻塞. |
注意事项:
⭐当线程调用lock()的时候,会有三种情况:
🌙如果该互斥量当前没有被锁住,则调用线程将该互斥量锁住,直到调用 unlock之前,该线程一直拥有该锁。
🌙如果当前互斥量被其他线程锁住,则当前的调用线程被阻塞住。它会一直等待,直到其他线程释放了该互斥量的锁,才能继续执行。
🌙如果当前互斥量被当前调用线程锁住,再次调用
lock操作将导致死锁。这是因为线程已经拥有该互斥量的锁,并且不会释放它,在这种情况下,线程会一直等待自己释放锁,从而导致死锁。
⭐线程函数调用try_lock()时,可能会发生以下三种情况:
🌙如果当前互斥量没有被其他线程占有,则该线程锁住互斥量,直到该线程调用 unlock释放互斥量。
🌙如果当前互斥量被其他线程锁住,则当前调用线程返回 false,而并不会被阻塞掉。
🌙如果当前互斥量被当前调用线程锁住,则会产生死锁(deadlock)。
2. std::recursive_mutex
允许同一个线程对互斥量多次上锁(即递归上锁),来获得对互斥量对象的多层所有权,释放互斥量时需要调用与该锁层次深度相同次数的 unlock(),除此之外,std::recursive_mutex 的特性和 std::mutex 大致相同。
3. std::timed_mutex
比 std::mutex 多了两个成员函数,try_lock_for(),try_lock_until() 。
🌙try_lock_for()
接受一个时间范围,表示在这一段时间范围之内线程如果没有获得锁则被阻塞住(与
std::mutex 的 try_lock() 不同,try_lock 如果被调用时没有获得锁则直接返回false),如果在此期间其他线程释放了锁,则该线程可以获得对互斥量的锁,如果超时(即在指定时间内还是没有获得锁),则返回 false。
🌙try_lock_until()
接受一个时间点作为参数,在指定时间点未到来之前线程如果没有获得锁则被阻塞住,如果在此期间其他线程释放了锁,则该线程可以获得对互斥量的锁,如果超时(即在指定时间内还是没有获得锁),则返回 false。
lock_guard
std::lock_gurad 是 C++11 中定义的模板类。定义如下:
//一般传入的就是互斥锁
template<class _Mutex>
class lock_guard
{
public:
// 在构造lock_gard时,_Mtx还没有被上锁
//explicit禁止隐式转换
explicit lock_guard(_Mutex& _Mtx)
: _MyMutex(_Mtx)
{
_MyMutex.lock();
}
// 在构造lock_gard时,_Mtx已经被上锁,此处不需要再上锁
lock_guard(_Mutex& _Mtx, adopt_lock_t)
: _MyMutex(_Mtx)
{}
~lock_guard() _NOEXCEPT
{
_MyMutex.unlock();
}
lock_guard(const lock_guard&) = delete;
lock_guard& operator=(const lock_guard&) = delete;
private:
_Mutex& _MyMutex;
};通过上述代码可以看到,lock_guard类模板主要是通过RAII的方式,对其管理的互斥量进行了封
装,在需要加锁的地方,只需要用上述介绍的任意互斥体实例化一个lock_guard,调用构造函数成功上锁,出作用域前,lock_guard对象要被销毁,调用析构函数自动解锁,可以有效避免死锁问题。
lock_guard的缺陷:太单一,用户没有办法对该锁进行控制,因此C++11又提供了unique_lock。
unique_lock
与lock_gard类似,unique_lock类模板也是采用RAII的方式对锁进行了封装,并且也是以独占所有权的方式管理mutex对象的上锁和解锁操作,即其对象之间不能发生拷贝。在构造(或移动(move)赋值)时,unique_lock 对象需要传递一个 Mutex 对象作为它的参数,新创建的unique_lock 对象负责传入的 Mutex 对象的上锁和解锁操作。使用以上类型互斥量实例化unique_lock的对象时,自动调用构造函数上锁,unique_lock对象销毁时自动调用析构函数解锁,可以很方便的防止死锁问题。
与lock_guard不同的是,unique_lock更加的灵活,提供了更多的成员函数:
上锁/解锁操作:lock、try_lock、try_lock_for、try_lock_until和unlock。
修改操作:移动赋值、交换(swap:与另一个unique_lock对象互换所管理的互斥量所有权)、释放(release:返回它所管理的互斥量对象的指针,并释放所有权)。
获取属性:owns_lock(返回当前对象是否上了锁)、operator bool()(与owns_lock()的功能相
同)、mutex(返回当前unique_lock所管理的互斥量的指针)。
condition_variable
在C++中也实现了对条件变量的技术支持。条件变量是一种线程同步机制,其作用是对一个线程进行阻塞,而后当该线程的某些条件满足后,就可以进行线程恢复,让线程苏醒。
线程阻塞:
std::condition_variable::wait 未满足某些条件时,阻塞线程。
线程通知:
std::condition_variable::notify_all。通知满足该条件的所有线程苏醒。
std::condition_variable::notify_one。通知满足该条件的某一个线程苏醒。
案例
支持两个线程交替打印,一个打印奇数,一个打印偶数。
#include<iostream>
#include<mutex>
#include<thread>
#include<condition_variable>
//支持两个线程交替打印,一个打印奇数,一个打印偶数
void two_thread_print()
{
std::mutex _mutex;
std::condition_variable cv;
int n = 100;
bool flag = true;//线程阻塞条件,false的时候,阻塞线程t1,true的时候阻塞线程t2
std::thread t1([&]() {
int i = 0;
while (i < n)
{
std::unique_lock<std::mutex> lock(_mutex);//上锁
cv.wait(lock, [&]()->bool {return flag; });//当返回true的时候,该线程不会被阻塞
std::cout << "t1: "<< i << std::endl;
flag = false;//条件改变
i += 2;//偶数
cv.notify_one();//唤醒满足条件的线程之一
}
});
std::thread t2([&]() {
int j = 1;
while (j < n)
{
std::unique_lock<std::mutex> lock(_mutex);//上锁
cv.wait(lock, [&]()->bool {return !flag; });//当返回为true的时候,该线程不会被阻塞
std::cout << "t2: " << j << std::endl;
flag = true;//改变条件
j += 2;//奇数
cv.notify_one();//唤醒满足条件的线程
}
});
t1.join();
t2.join();
}
int main()
{
two_thread_print();
return 0;
}