前言
前面主要讲述的是方程组和矩阵的关系,现在了解下矩阵和矩阵的关系
方阵的特征值与特征向量
假设A为n阶方阵,对于一个数 λ \lambda λ
若存在:非零列向量 α \alpha α,使得: A α ⃗ = λ α ⃗ A\vec{\alpha}=\lambda\vec{\alpha} Aα=λα
-
λ \lambda λ叫做矩阵A的一个特征值
-
α ⃗ \vec{\alpha} α叫做对应特征值的特征向量

- 由于 α ⃗ \vec\alpha α是非零列向量
- 把 λ \lambda λ作为未知量, A − λ E = 0 A-\lambda E = 0 A−λE=0
- 因为存在 λ \lambda λ解 => ∣ A − λ E ∣ = 0 |A-\lambda E| = 0 ∣A−λE∣=0
求解特征方程
给一个n阶矩阵A写出特征矩阵
(
4
−
2
1
1
)
−
(
λ
0
0
λ
)
=
(
4
−
λ
−
2
1
1
−
λ
)
\begin{pmatrix} 4 & -2\\ 1 & 1\end{pmatrix} - \begin{pmatrix} \lambda & 0\\ 0 & \lambda\end{pmatrix} = \begin{pmatrix} 4- \lambda & -2\\ 1 & 1-\lambda\end{pmatrix}
(41−21)−(λ00λ)=(4−λ1−21−λ)
将特征矩阵转为特征行列式
∣
4
−
λ
−
2
1
1
−
λ
∣
=
−
∣
1
1
−
λ
4
−
λ
−
2
∣
=
−
∣
1
1
−
λ
0
−
2
−
(
1
−
λ
)
∗
(
4
−
λ
)
∣
=
0
\begin{vmatrix} 4- \lambda & -2\\ 1 & 1-\lambda\end{vmatrix} = -\begin{vmatrix} 1 & 1-\lambda\\ 4- \lambda& - 2\end{vmatrix} =-\begin{vmatrix} 1 & 1-\lambda\\ 0 & -2-(1-\lambda) *(4- \lambda) \end{vmatrix} = 0
4−λ1−21−λ
=−
14−λ1−λ−2
=−
101−λ−2−(1−λ)∗(4−λ)
=0
求出根
λ
2
−
5
λ
+
6
=
0
⟹
λ
1
=
2
,
λ
2
=
3
\lambda^2-5\lambda + 6 =0 \Longrightarrow \lambda_1=2 ,\lambda_2=3
λ2−5λ+6=0⟹λ1=2,λ2=3
求解特征值对应的特征向量
- 将 λ 1 = 2 , λ 2 = 3 \lambda_1=2 ,\lambda_2=3 λ1=2,λ2=3 代入 ( A − λ E ) α ⃗ = 0 (A-\lambda E)\vec{\alpha} = 0 (A−λE)α=0


基本性质

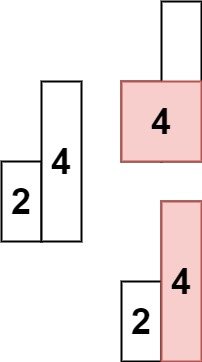
- 特征值和特征向量,就是类似于 给“坐标” 求他的坐标系的问题。
- 特征值 λ \lambda λ用于消除“坐标”某一维度,得到 特征向量为这一维度的 “坐标系”
- 如果出现了 λ \lambda λN重根,则得到的特征向量 “坐标系” 包含N个维度

- 方阵的行列式=方阵的全部特征值之积
- 方阵主对角线元素之和=方阵的全部特征值之和
相似矩阵

相似矩阵的定义,可以用坐标系变换的视角来理解
- 需要把:A和B看做是两个变换
- 那么
A
=
P
−
1
B
P
A=P^{-1}BP
A=P−1BP具体是指:
- A是P坐标系下的一个<变换>
- 该<变换>若在标准坐标系下观察则是B变换
例如:在标准坐标系下有一个伸缩变换为B,在P坐标系下相同的伸缩变换观察到的是A

若A和B相似,因观察的视角不同,但本质是相同的变换
相似矩阵的性质
若A和B相似,即 A ∽ B B ∽ A A \backsim B \quad B \backsim A A∽BB∽A
- 相似矩阵的行列式值相同
- 相似矩阵的特征值相同
- 相似矩阵的秩相同
- 相似矩阵的迹相同
- 相似矩阵的可逆性相同
主要参考
《11.3 求解特征值和特征向量(基础解系法)》
《11.4 特征值与特征向量的性质》
《11.5特征值与矩阵的迹》
《1.6 特征根的代数重数与几何重数》
《11.7 相似矩阵到底在说什么》