飞思实验室“基于RflySim平台飞控底层算法开发”系列专题培训第二期开启报名了!专题培训由戴训华副教授以及飞思实验室学生&工程师团队主讲,采用“线上+线下”集中授课形式,培训时间为8月28日-9月3日;课程内容以RflySim平台介绍及使用、底层算法开发接口使用、多旋翼控制模型搭建以及多旋翼失效保护逻辑设计等实验开展,由浅入深带你实现无人机底层算法Sim2Real的开发技术!
01 平台介绍
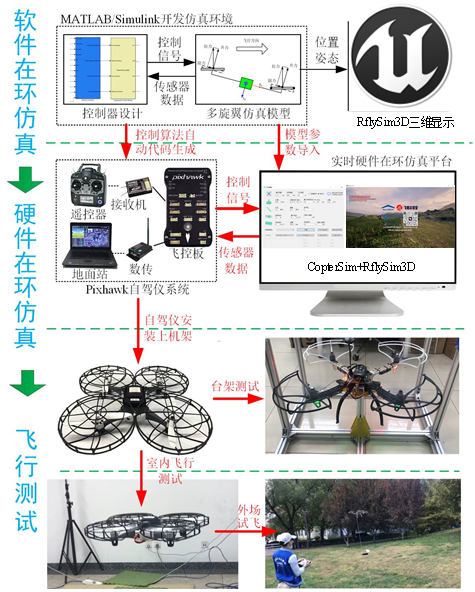
RflySim平台是一个生态系统或工具链(官网:Introduction · GitBook),发起于北航可靠飞行控制研究组,主要用于遵循基于模型设计的思想进行无人系统的控制和安全测试。本平台选择MATLAB/Simulink作为控制核心编程平台,将基于模型的设计(Model-Based Design, MBD)理念中的需求追溯、充分仿真验证与自动代码生成等技术,应用到控制系统的底层控制、中层安全决策和顶层视觉集群与人工智能等算法开发过程中。本次培训的主题为“基于RflySim平台飞控底层算法开发”,后续此类培训课程会每月最后一周开展一次,敬请各位持续关注!!!

02 可学到的技能
-
RflySim平台的使用技能,包含(不限于)软件在环仿真、硬件在环仿真以及真机实飞算法迁移等;
-
掌握运用MATLAB/Simulink进行基于模型设计的完整流程和快速开发技能;
-
通过学习多旋翼无人机控制器设计相关理论知识,掌握多旋翼无人机控制器设计、半自主模式设计、失效保护逻辑设计等实验。
-
结合理论知识学习和控制算法开发,完成无人机真机算法迁移、部署和调试,掌握Sim2Real的多旋翼无人机开发理念。

03 培训标题与形式
①培训形式
培训将采取“线上+线下”集中授课的形式进行。线上采用直播授课的形式,报名学员免费提供课程录播视频,发送全部案例代码,建立课程答疑群,群内常驻负责答疑的专业老师;线下采用现场式教学模式,由专业飞手带队,在飞行场地对线上课程中的实飞案例进行现场指导教学,实现Sim2Real的开发理念。
②培训内容
专题一:RflySim平台介绍篇,包括RflySim平台详细介绍包括平台组成和软硬件介绍,包括软、硬件使用说明,PSP代码生成与烧录工具箱介绍,软、硬件在环仿真流程教学等内容。帮助学员熟悉RflySim平台的特点、特色功能以及核心组件的使用方法;
专题二:仿真实验篇,首先通过基于RflySim平台的模型设计、软件在环仿真及硬件在环仿真案例,帮助学员深入熟悉基于RflySim平台的飞控底层算法的全套开发流程、实验步骤等。然后,重点讲解多旋翼动力系统设计和建模、半自主控制模式设计等实验,帮助学员完成具体案例得开发,掌握基于模型设计的开发思路。
专题三:实飞调试篇,通过对线上课程的理论知识学习,掌握多旋翼无人机的姿态、位置控制器设计及半自主控制等模式开发。本篇将线上课程所开发的算例移植到真机,完成多旋翼无人机的真机部署、调试到真实飞行,实现Sim2Real的开发流程。
| 专题名称 | 培训规划 | 培训时间 | 备注 |
| 专题一: RflySim平台 介绍篇 | 1.1 平台的简介与安装 1.2 软、硬件简介与使用 1.3 本次课程总览 1.4 软、硬件在环仿真实验 | 2023.8.28 18:30~21:30 | 线上教学 |
| 专题二:仿真实验篇 | 2.1 RflySim飞控底层算法开发原理 2.2 实验流程介绍(含姿态控制器设计) 2.2 RflySim底层开发接口介绍 | 2023.8.29 18:30~21:30 | |
| 3.1 动力系统设计与建模实验 3.2 多旋翼传感器标定实验 | 2023.8.30 18:30~21:30 | ||
| 3.3 半自主控制模式设计实验 3.4 多旋翼失效保护逻辑实验 | 2023.8.31 18:30~21:30 | ||
| 专题三:实飞调试篇 | 1. 飞机调试与官方固件试飞 | 2023.9.02 9:00~12:00 | 线下教学 |
| 2. 实飞实验注意事项说明 | |||
| 3. 总体实飞实验安排计划 | |||
| 总结与答疑 | |||
| 4. 四旋翼PID参数整定实验 | 2023.9.02 14:00~17:00 | ||
| 5. 姿态控制器转台实验 | |||
| 实验总结与课后答疑 | |||
| 6. 半自主控制模式设计实验 | 2023.9.03 9:00~12:00 | ||
| 实验总结与课后答疑 | |||
| 7. 多旋翼失效保护逻辑实验 | 2023.9.03 14:00~17:00 | ||
| 8. 学员设计实飞例程实验 | |||
| 9. RflySim后续培训课程安排 |
04 培训讲师
戴训华副教授以及飞思实验室学生&工程师团队。
05 培训费用
本次培训费用共分为:线上培训、线下现场教学及配套硬件费用,由于涉及到线下培训教学内容,因此,还包含有住宿费用。具体的收费套餐(不包含硬件费用)如下:
配套硬件及住宿费用明细
| 序号 | 名称 | 费用(元) | 备注 | |
| 配套硬件费用 | ||||
| 1 | HIL套件 | 卓翼H7飞控 | 3999 | 需提前联系助教购买或租用 (参见注释①) |
| 遥控器接收器 | ||||
| 遥控器 | ||||
| 其他配件 | ||||
| 住宿费用(参见注释②) | ||||
| 2 | 普通大床房/双人间 | 188/天 | 入住前请联系 助教老师 | |
| 3 | 豪华大床房/双人间 | 218/天 | ||
| ①:学员可通过购买或租用的形式获得HIL套件,购买时间截至于2023年8月22日,也可自行选择购买Pixhawk系列飞控,推荐型号为:Pixhawk 2.4.8(又名Pixhawk 1)、Pixhawk 6X、Pixhawk 6C,注:租用需缴押金3000元,租金为80元人/套/日,课程结束后可选择直接购买;本次课程所使用的卓翼H7飞控,将提供本飞控的使用流程及技术支持;Pixhawk系列仅提供使用流程,不提供技术支持; ②:表中价格为与酒店洽谈的协议价,学员可选择性入住,住宿酒店地址:湖南省长沙市雨花区韶山南路123号华翼府B座橘子臻品酒店铁道学院店。 | ||||
06 增值服务
1、凡报名学员将获得本次培训中的随堂电子资料(案例代码);
2、凡报名学员遇到与课程相关的问题,均可在课程结束后可以得到老师的解答与指导(邮件、微信等);
3、凡购买套餐1课程的学员,均提供线上课程视频回放;
4、凡飞思实验室前期课程报名成功学员,报名本期课程均享受半价优惠。
5、四人组团报名,一人免费;三人组团报名,一人半价;两人组团报名,一人七折。
07 课程前期咨询、报名及缴费
请各位有意向报名的学员,关注飞思实验室公众号底部“服务支持”->“课程报名”进行课程报名相关问题咨询。

扫描上方二维码 关注飞思实验室
08 注意事项
1.课程报名缴费提供普通发票,发票类型为培训费,具体费用支付方面问题请进入培训咨询群进行了解。
2.本次课程中所使用的飞机型号为飞思X450模型设计版,需要购买的学员可咨询课程助教老师进行购买。飞思实验室(部分)其余四旋翼无人机如下图所示。



飞思实验室(部分)四旋翼无人机
3.本课程全程(线上+线下)需学员自行准备电脑,电脑配置及软件最低要求可见如下:
系统:Windows 10 x64系统(版本大于等于1809)
CPU:Intel i5 十代处理器及以上,或同等性能AMD处理器
显卡:英特尔集成显卡UHD 630及以上,或同等性能AMD显卡
内存:容量16G及以上,频率DDR3 1600MHz及以上
硬盘:安装盘剩余容量40G及以上(推荐固态硬盘)
显示器:分辨率1080P(1920*1080)及以上
接口:至少有一个USB Type A接口(可用扩展线)
MATLAB:2017b或以上版本(推荐2017b版本)
注:电脑配置应该越高越好,低配电脑也可以运行本平台Demo,但是可能出现控制不稳定、实验效果不佳等问题。MATLAB请提前自行安装。
4.本次课程可在基础版上进行实验,可以在https://rflysim.com/download填写邮箱,从而获取云盘下载链接。平台首次安装请参考安装教程:https://www.bilibili.com/video/BV1oM411V7XE/?spm_id_from=333.999.0.0 。完整版下载链接和注册码请咨询 service@rflysim.com。注:课程开始之前请务必完成RflySim平台安装。

5.本次课程中理论部分详细讲解请见书籍《多旋翼飞行器设计与控制》、《多旋翼飞行器设计与控制实践》,如下图所示。左侧的《多旋翼飞行器设计与控制实践》为2020年推出的针对飞行控制算法开发的实践课程,包含本课程理论知识与其他实验。右侧的《多旋翼飞行器设计与控制》为2017年推出的教程,主要针对多旋翼控制理论。09、
09 未来计划(部分)课程展示
多旋翼无人机视觉控制接口、通信、控制例程与实践。单目视觉撞击小球实验/单目视觉穿环完整任务实验/双目相机标定、人脸识别、跟踪实验/树莓派或NX(Linux/ROS环境)与飞控硬件同时在环的视觉仿真/真机视觉控制应用介绍与演示。

RflySim平台集群算法例程与接口详解。设计集群相关算法,在Simulink中实现算法,并连接UE4显示引擎,进行集群算法的软件在环仿真、硬件在环仿真、和真机实时通信与控制。Python控制无人机集群接口介绍与实验,带视觉的分布式集群功能介绍等等。
后续培训课程将每月进行一次,课程开发中,敬请期待!!!