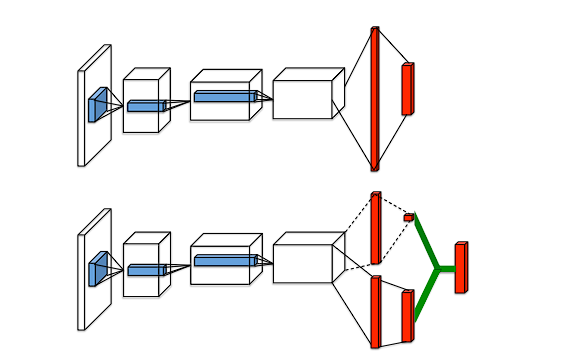
算法原理:
Q
(
s
,
a
;
θ
,
α
,
β
)
=
V
(
s
;
θ
,
β
)
+
(
A
(
s
,
a
;
θ
,
α
)
−
max
a
′
∈
∣
A
∣
A
(
s
,
a
′
;
θ
,
α
)
)
.
\begin{gathered}Q(s,a;\theta,\alpha,\beta)=V(s;\theta,\beta)+\left(A(s,a;\theta,\alpha)-\max_{a'\in|\mathcal{A}|}A(s,a';\theta,\alpha)\right).\end{gathered}
Q(s,a;θ,α,β)=V(s;θ,β)+(A(s,a;θ,α)−a′∈∣A∣maxA(s,a′;θ,α)).
注:DuelingNetwork只是改变最优动作价值网络的架构,原本用来训练DQN的策略依然可以使用:
1、优先级经验回放;
2、Double DQN;
3、Multi-step TD;
代码实现,只需要将原来的DQN的最优动作价值网络修改成Dueling Network的形式:
class DuelingNetwork(nn.Module):
"""QNet.
Input: feature
Output: num_act of values
"""
def __init__(self, dim_state, num_action):
super().__init__()
# A分支
self.a_fc1 = nn.Linear(dim_state, 64)
self.a_fc2 = nn.Linear(64, 32)
self.a_fc3 = nn.Linear(32, num_action)
# V分支
self.v_fc1 = nn.Linear(dim_state, 64)
self.v_fc2 = nn.Linear(64, 32)
self.v_fc3 = nn.Linear(32, 1)
def forward(self, state):
# 计算A
a_x = F.relu(self.a_fc1(state))
a_x = F.relu(self.a_fc2(a_x))
a_x = self.a_fc3(a_x)
# 计算V
v_x = F.relu(self.v_fc1(state))
v_x = F.relu(self.v_fc2(v_x))
v_x = self.v_fc3(v_x)
# 计算输出
x = a_x - v_x - a_x.max()
return x
![[Vulnhub] matrix-breakout-2-morpheus](https://img-blog.csdnimg.cn/6bb50b412e3b4591bf8f5912922a1c38.png)




![[HDLBits] Exams/m2014 q4f](https://img-blog.csdnimg.cn/img_convert/18a581f63da507aa39f2ccea0a35596c.png)