3-BEV开源数据集
- 1 KITTI
- 1.1 KITTI数据怎么采集?
- 1.2 KITTI数据规模有多大?
- 1.3 KITTI标注了哪些目标?
- 1.4 转换矩阵
- 1.5 标签文件
- 2 nuScenes
- 2.1 nuScenes Vs KITTI
- 2.2 标注文件
1 KITTI
KITTI
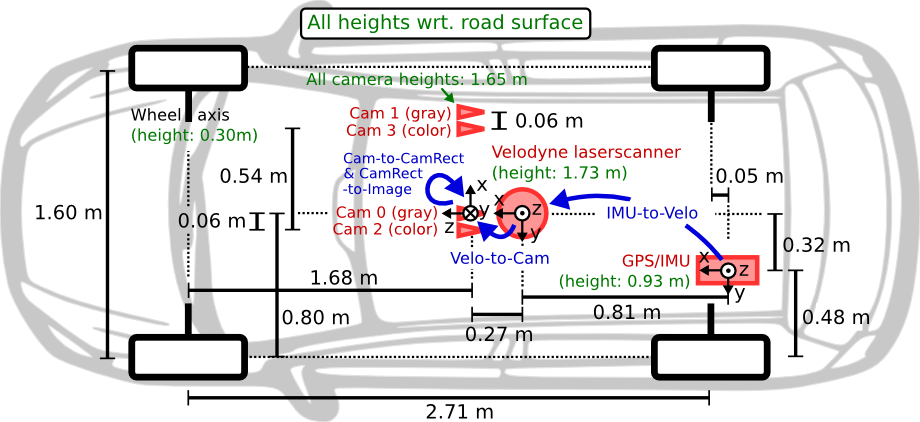
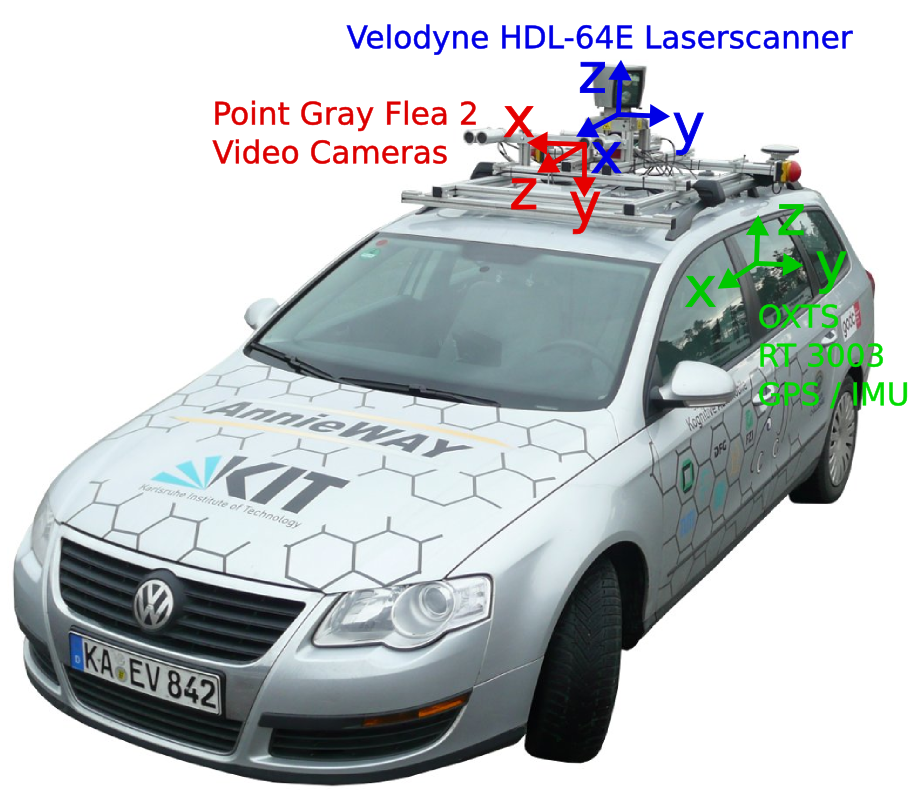
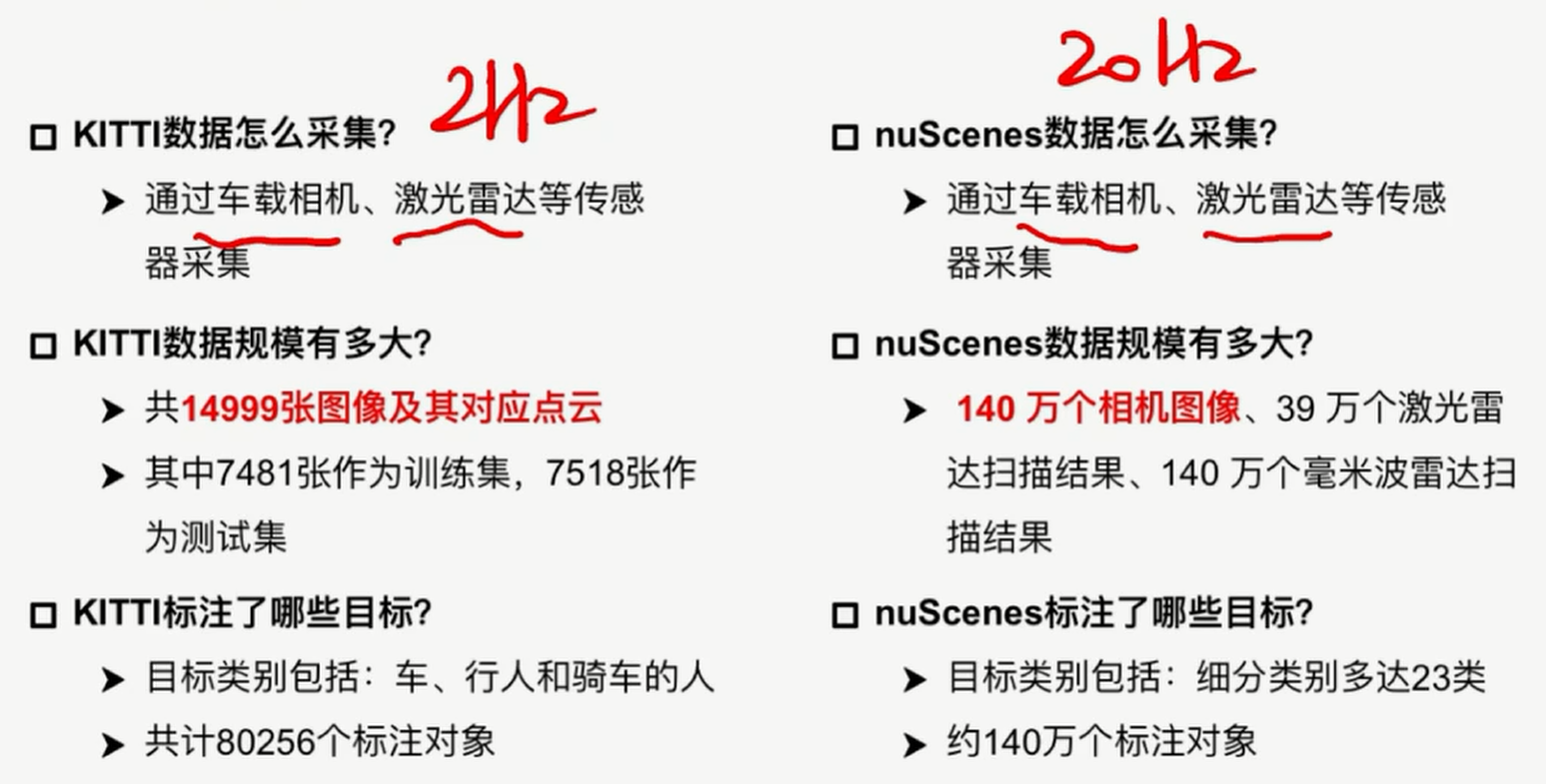
1.1 KITTI数据怎么采集?
通过车载相机、激光雷达等传感器采集。
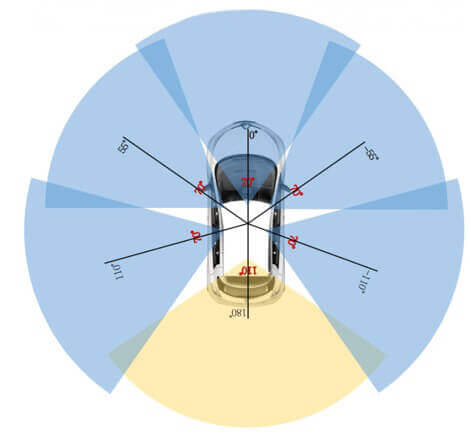
只提供了相机正视图90度范围内的标注数据。

1.2 KITTI数据规模有多大?
共14999张图像及其对应点云。其中7481张作为训练集,7518张作为测试集
1.3 KITTI标注了哪些目标?
目标类别包括:车、行人和骑车的人共计80256个标注对象
1.4 转换矩阵
y = P r e c t ( i ) R r e c t ( 0 ) T v e l o c a m x y=P_{rect}^{(i)}R_{rect}^{(0)}T_{velo}^{cam}x y=Prect(i)Rrect(0)Tvelocamx
x x x:表示点云坐标x,y,z。 y y y:表示像素坐标, T v e l o c a m T_{velo}^{cam} Tvelocam :表示从LiDar坐标系转换到相机坐标系。 R r e c t ( 0 ) R_{rect}^{(0)} Rrect(0) :表示相机畸变矫正参数。 P r e c t ( i ) P_{rect}^{(i)} Prect(i) :表示相机内参,将图像从相机坐标系转换到像素坐标系。
该转换矩阵可以实现点云坐标和像素坐标之间的双向转换。
1.5 标签文件
每个txt文件代表一个场景,场景用六位数字编号。
文件内容如下,每一行标识一个物体。
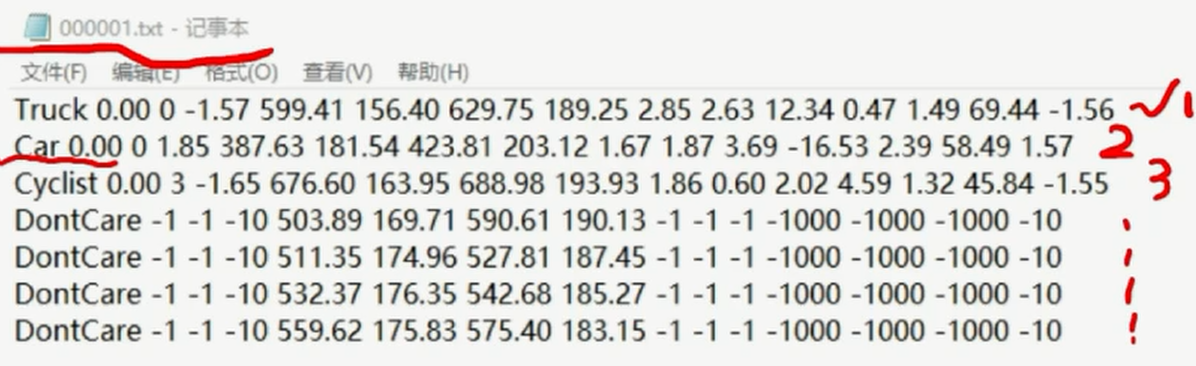

以000000.txt文件及其对应的图像为例。
Pedestrian 0.00 0 -0.20 712.40 143.00 810.73 307.92 1.89 0.48 1.20 1.84 1.47 8.41 0.01
| 参数名 | 参数值 | 参数值类型 | 参数值范围 | 备注 |
|---|---|---|---|---|
| 目标类别 | Pedestrian | |||
| 截断程度 | 0.00 | 连续值 | [0.0,1.0] | 截断是指目标只有一部分出现在图片中 |
| 遮挡程度 | 0 | 整数,离散值 | {0,1,2,3} | 0无遮挡,1部分遮挡,2严重遮挡,3无法辨识是否遮挡 |
| 观测角度 | -0.20 | 弧度值 | [-π,π] | 当前标注物体与相机之间夹角 |
| 2d label | 712.40 143.00 810.73 307.92 | 坐标值 | 2d目标框的坐标位置,前两个值表示左上角点坐标,后两个值表示右下角点坐标 | |
| 3d label | 1.89 0.48 1.20 1.84 1.47 8.41 | 坐标值 | 单位:米 | 前三个值表示高h宽w长l,后三个值表示中心点位置坐标,与观测角度组成7个3d目标检测量 |
| 置信度 | 0.01 | 概率值 | 表示当前目标以该位置以类别存在的概率有多大,通常在测试时网络预测后使用的值 |

2 nuScenes
nuScenes
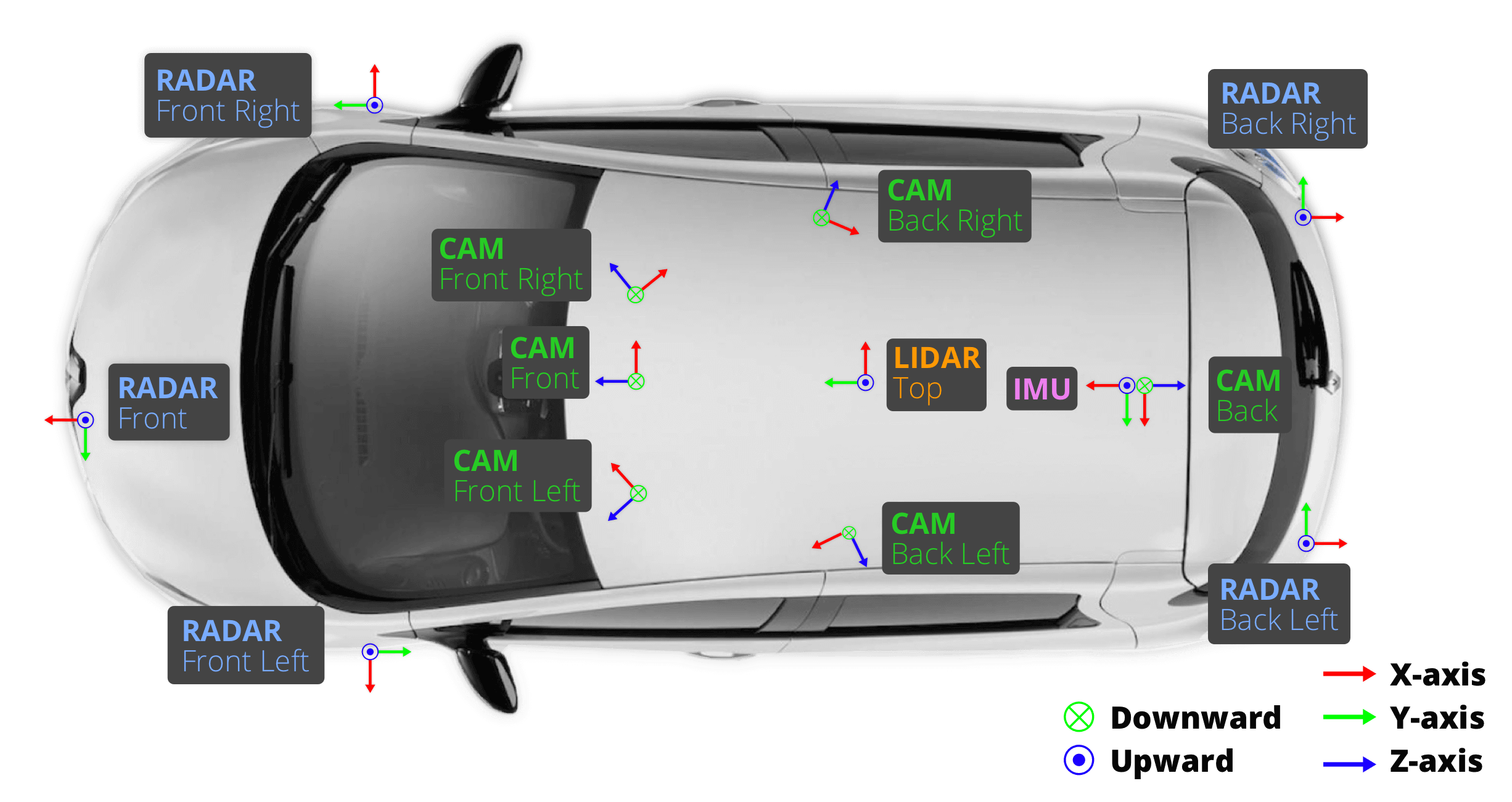
6个相机,车顶LiDAR,5个毫米波雷达。可提供 图像数据、点云数据、目标标注(转换矩阵)。
2.1 nuScenes Vs KITTI
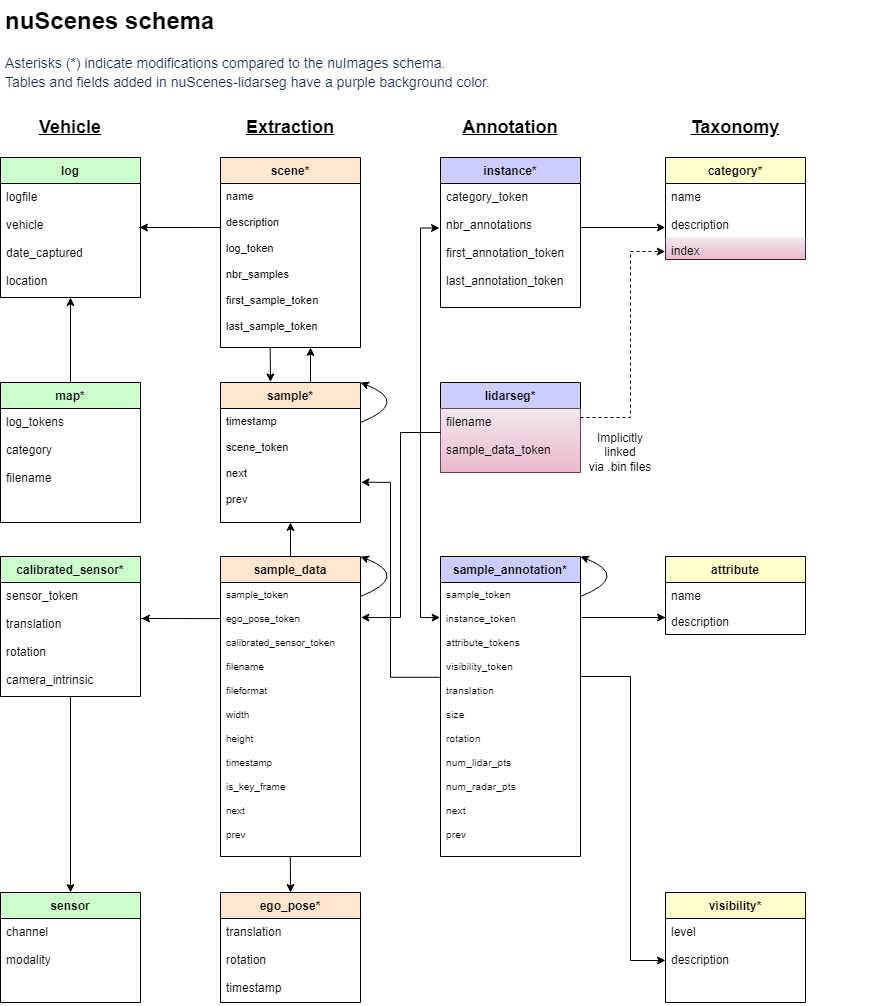
2.2 标注文件
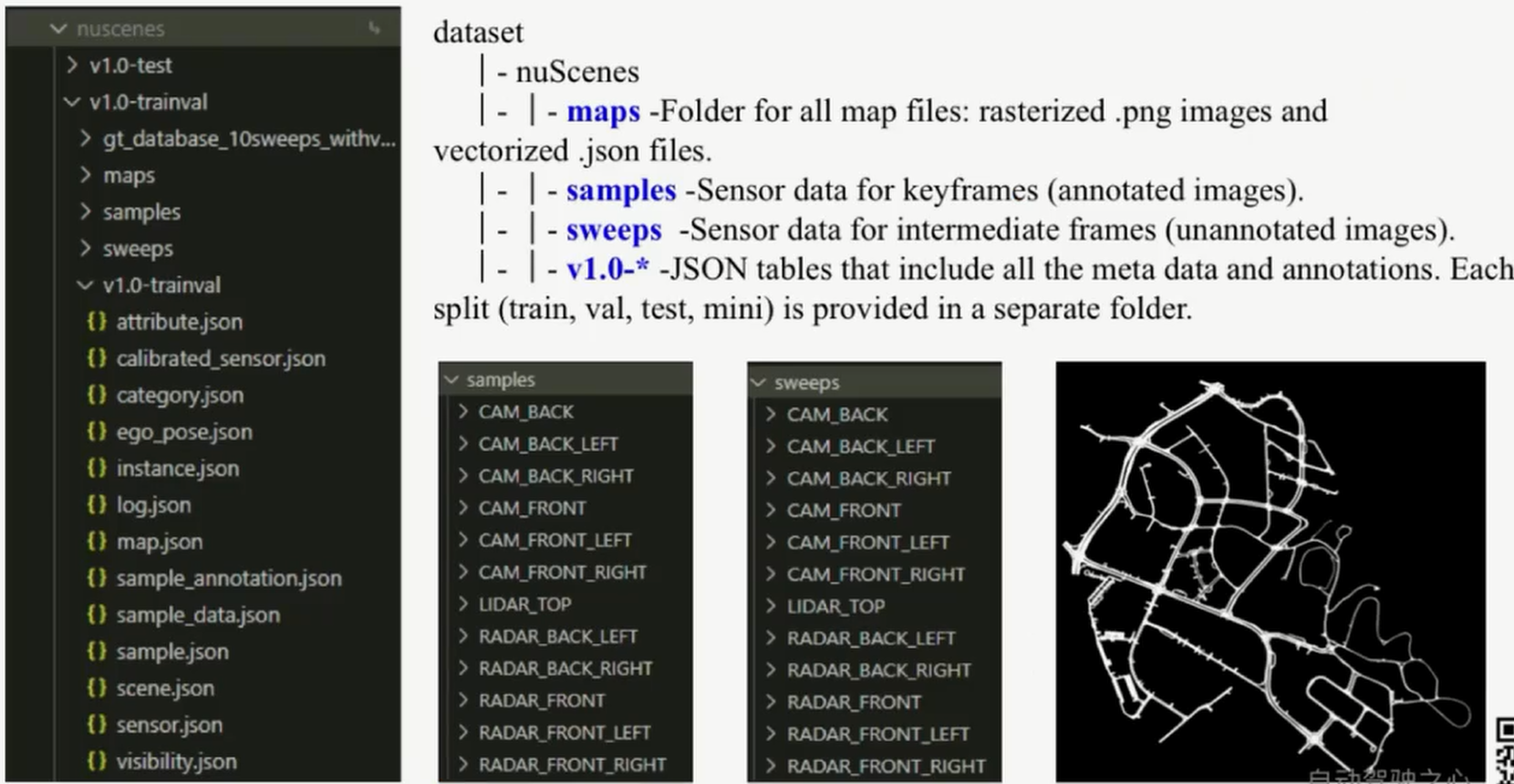
| -nuSecenes
| - | - maps:后继规划任务使用,目标检测中用不到。
| - | - samples:抽取的关键帧,已标注。
| - | - sweeps:未被抽取为关键帧的其余帧,未标注。
| - | - v1.0-*:json标注文件,*表示train,val,test,mini不同文件夹。
| - | - | - attribute.json:描绘了一个实例的属性。
| - | - | - calibrated_sensorjson:车辆上已经校准的特定传感器(激光雷达/雷达/摄像机)的标定数据,其实就是转换矩阵。
| - | - | - category.json:对象类别的分类。
| - | - | - ego_pose.json:车辆在特定时刻的一个姿态。
| - | - | - instancejson:一个物体的实例。
| - | - | - log.json:提取数据的日志的信息。
| - | - | - map.json:用二值分割掩膜所保存的地图数据口,规划中常用目标检测中不常用。
| - | - | - sample.json:样例。指出哪些帧是关键帧。
| - | - | - sample_annotation.json:3d bounding box,关键帧中的目标信息。
| - | - | - sample_data.json:所有的传感器数据。除关键帧外的其他帧。
| - | - | - scene.json:场景数据
| - | - | - sensor.json:传感器的种类
| - | - | - visibility.json:实例的可见性