第六章 图
一、图
1.定义:V是顶点集,E是边集;|V|表示顶点数,称为阶;|E|表示边数;有向图叫弧<>,无向叫边() ;
- 有向图:有方向,<v,w>的v和w之间是有序的,v弧尾(不带箭头),w弧头(带箭头);
- 无向图:无方向,<v,w>的v和w之间是无序的;
- 权:两顶点之间的距离;
- 路径:两顶点间经过的点边上的数目,若第一个顶点和最后一个顶点路径相同,叫做环;如果一个图有n个顶点,且有大于n-1条边,则该图一定有环。
- 简单路径:顶点不重复;
- 简单回路:除第一个顶点和最后个顶点外,其余顶点也不重复出现;
2.简单图:无重复边,不存在顶点到自身的边;有n个顶点的向完有全图有n(n-1)条边;
3.完全图:任意两顶点间都存在边;有n个顶点的无向完全图有n(n-1)/2条边;
- 完全无向图:存在两个不相同的点且两点间有一条无向边;
- 完全有向图:存在两个不相同的点且两点间有一条弧;
4.稀疏图和稠密图:很少边,很少弧,判断标准e<nlog₂n,反之为稠密图;
5.子图和生成子图:顶点和边都属于另一个图,则叫子图;顶点数与图相等,但边只属于该图,则叫生成子图;
6.连通:在无向图中,只要存在路径就是连通的;
- 连通图:任意两点中只要存在路径就是连通的,否则不是;
- 连通分量:无向图的极大(极大要求该连通子图包含其所有的边)连通子图称为该图的连通分量;任何连通图的连通分量只有一个,即是自身,非连通图的无向图有多个连通分量;如果一个图有n个顶点,且小于n-1条边,则此图必为连通图;
- 强连通图:在有向图中任意一对顶点都强连通的;
- 强连通分量:在有向图中的极大强连通子图称为有向图的强连通分量;
7.顶点的邻接(Adjacent):对于无向图G=(V,E),若边(v,w)EE,则称顶点v和w互为邻接点,即v和w相邻接。
顶点的度、入度、出度:对于无向图G=(V,E),VvieV,图G中依附于的边的数目称为顶点的度(degree),记为TD(vi)。
显然,在无向图中,所有顶点度的和是图中边的2倍。 即 ∑TD(vi)=2e ;i=1,2…n ,e为图的边数。(度和公式)。
8.对有向图G=(V,E),若存在vi∈V ,图G中以vi作为起点的有向边(弧)的数目称为顶点vi的出度(Outdegree),记为OD(vi);以vi作为终点的有向边(弧)的数目称为顶点的入度(Indegree),记为ID(vi)。顶点的出度与入度之和称为的度,记为TD(vi)。即TD(vi)=OD(vi)+ID(vi);
二、图的存储
1.存储结构:邻接矩阵、邻接链表、邻接多重表和边表;
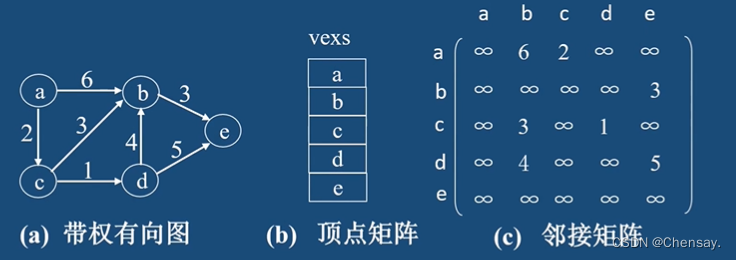
2.邻接矩阵(无向图和有向图都各有无权图和有权图两类)
-
无向图的数组表示
-
特点: 对称方阵;顶点相邻的边数等于该点度数;图所有边数等于下或上三角的非0元素的个数;
-
无权图的邻接矩阵

-
带权图的邻接矩阵

-
-
有向图数组表示
-
特点: 某行的非0元素个数对应是出度,某列的非0元素个数对应入度;
-
无权图的邻接矩阵

-
带权图的邻接矩阵
-
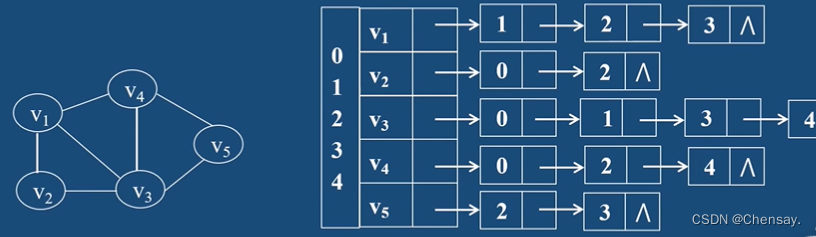
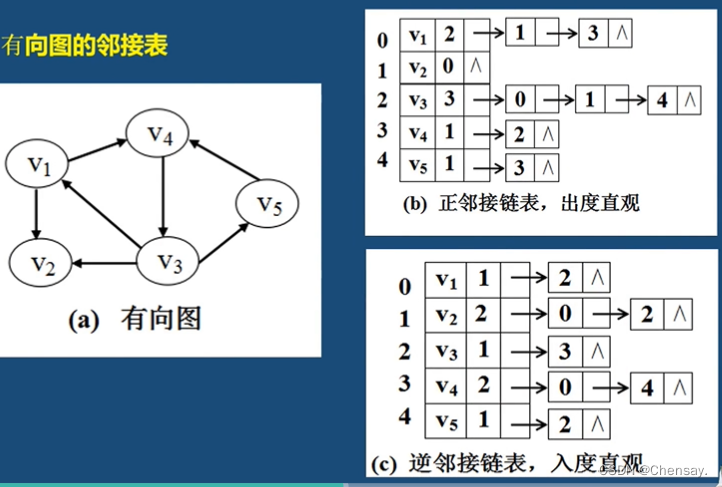
3.邻接链表法:对图的每个顶点建立一个单链表,存储该顶点所有邻接顶点及其相关信息。每一个单链表设一个表头结点。
-
特点:对有向图可以建立正邻接表或逆邻接表;在有向图中,第i个链表中结点数是顶点的出或入度,求出或入度需要遍历整个邻接表;
-
无向图的邻接表
-
有向图的邻接表
三、图的遍历
1.图的遍历算法
-
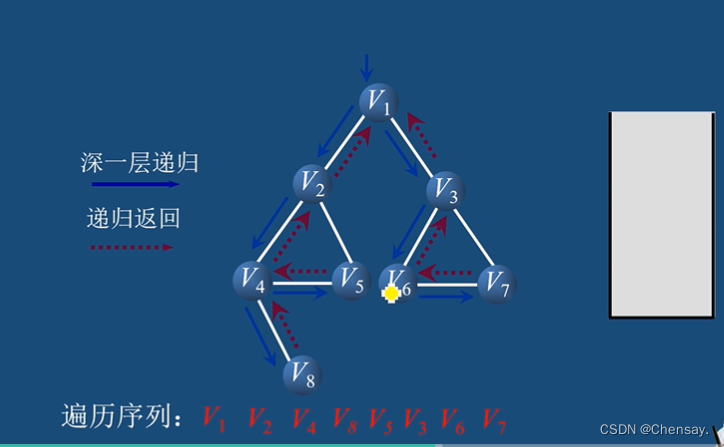
深度优先搜索算法:类似树的先序遍历,是树的先序遍历的推广;借助栈实现,是递归算法,空间复杂度O(V);以邻接矩阵表示时时间复杂度O(V²),以邻接表表示时时间复杂度为O(e+V);
-
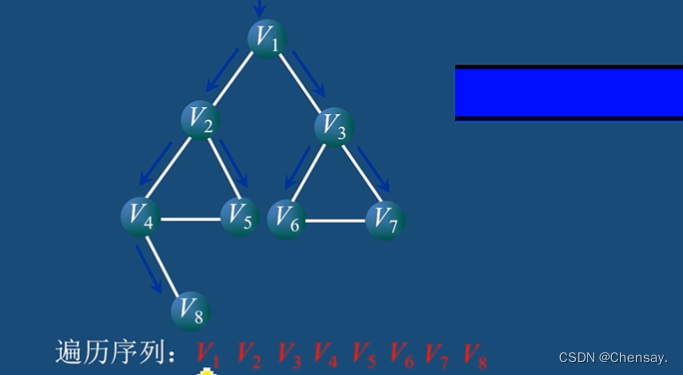
广度优先搜索算法:类似于树的按层次遍历,借助队列实现,空间复杂度O(V);以邻接矩阵表示时时间复杂度O(V²),以邻接表表示时时间复杂度O(e+V);
四、图的应用
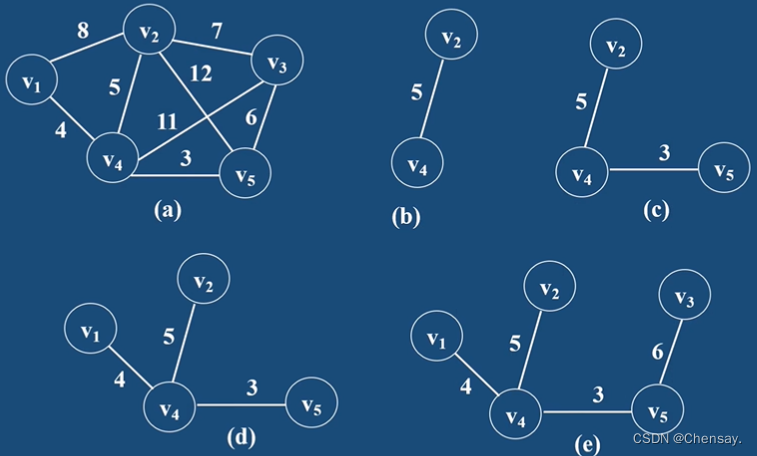
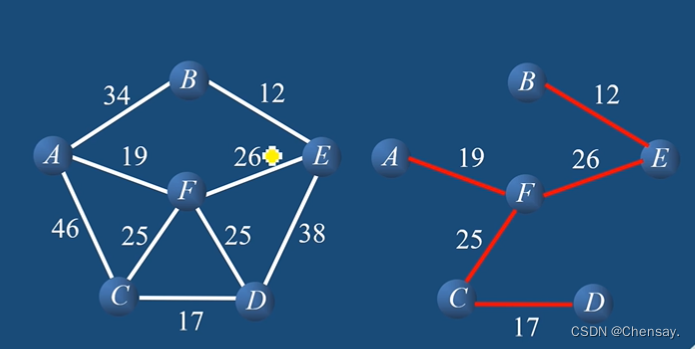
1.最小生成树:如果连通图是一个带权图,则其生成树中的边也带权,生成树中所有边的权值之和称为生成树的代价。带权连通图中代价最小的生成树称为最小生成树;
- 基本原则是:
- 尽可能选取权值最小的边,但不能构成回路;
- 选择n-1条边构成最小生成树。
- 普里姆(Prim)算法:整个算法的时间复杂度是O(n²),与边的数目无关,适用于求解稠密图最小生成树。
- 克鲁斯卡尔(Kruskal)算法:整个算法的时间复杂度是O(eloge);适用于边稀疏而顶点较多的图。
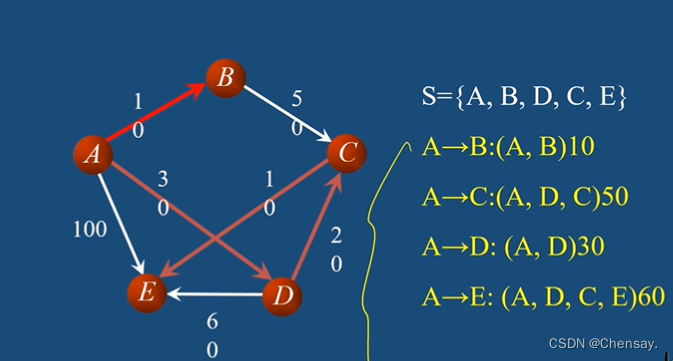
2.最短路径:带权有向图的最短路径,也适用于无向图。将一个路径的起始顶点称为源点,最后一个顶点称为 终点。
- 单源点最短路径
- 迪杰斯特拉算法:一个顶点到每个顶点的最短路径;按路径长度递增次序;时间复杂度是O(n²);
- 迪杰斯特拉算法:一个顶点到每个顶点的最短路径;按路径长度递增次序;时间复杂度是O(n²);
- 弗洛伊德算法:每一对顶点之间的最短路径,时间复杂度O(n³);
3.AOV网:顶点表示活动,弧表示优先关系;
- 特点:弧表示活动间存在某种制约关系;不能出现回路;
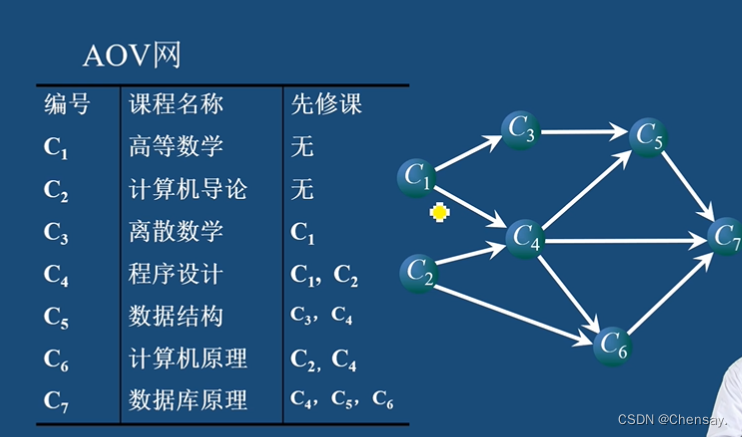
- 拓扑排序:对一个有向图构造拓扑序列的过程;时间复杂度O(n+e);使得AOV网中所有应有存在的前驱和后继关系都能得到满足;(简单来说就是找入度为0的点然后挨个去掉);若AOV网中存在回路即写不出拓扑排序。
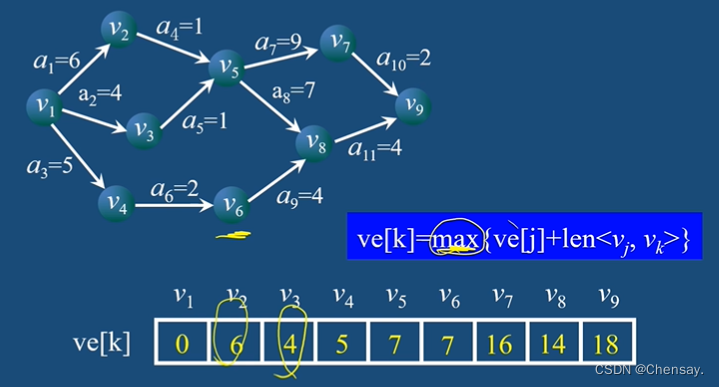
4.AOE网:求关键路径,基于有向图;边表示活动;AOE网中没有入边的顶点叫始点,没有出边的叫终点;
- 关键路径:始点到终点具有最大路径长度,该路径上的各个活动所持续的时间之和的路径称为关键路径(类似工程所需的最短工期);
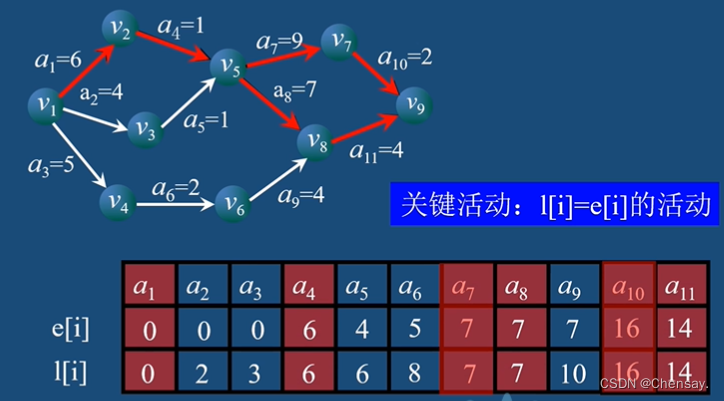
- ▲关键活动:关键路径上的活动称为关键活动;
- 事件的最早发生时间ve[k];
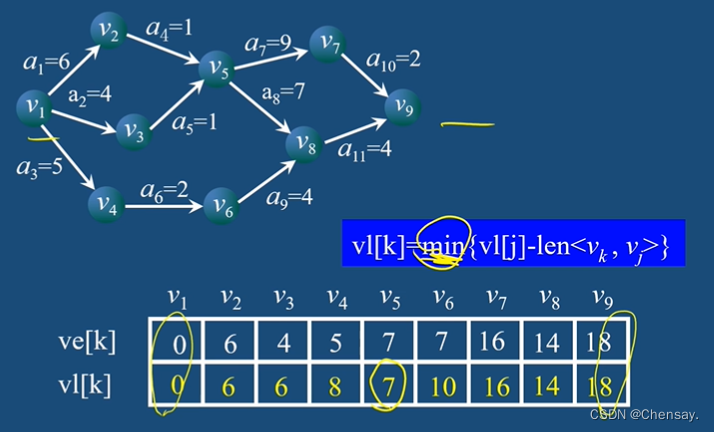
- 事件的最迟发生时间vl[k];
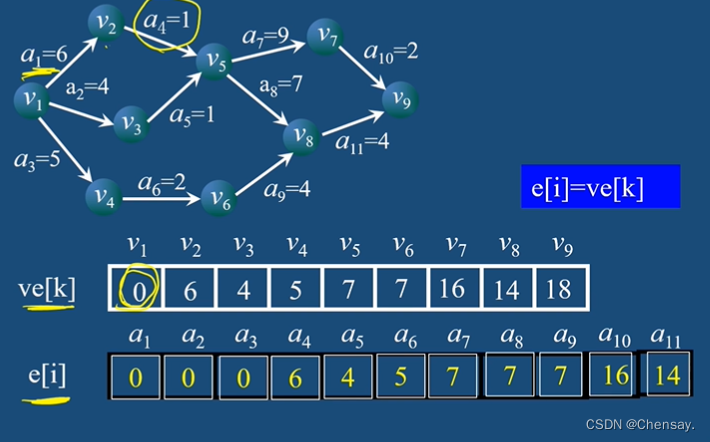
- 活动的最早开始时间e[i];
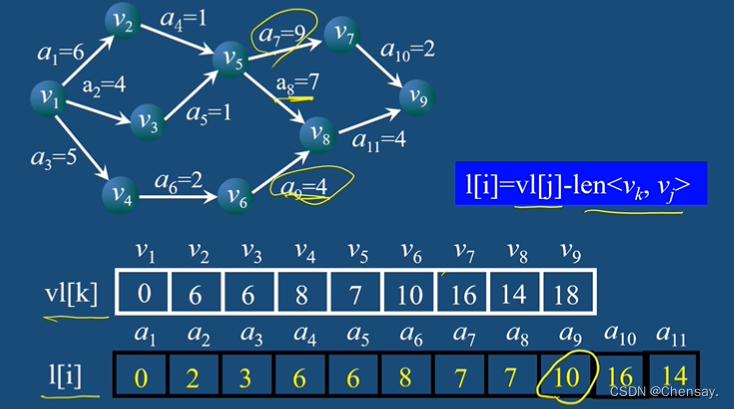
- 活动的最晚开始时间l[i];
- 关键活动:l[i]=e[i]的活动(红色部分是由关键活动组成的路径,叫关键路径);
- 事件的最早发生时间ve[k];