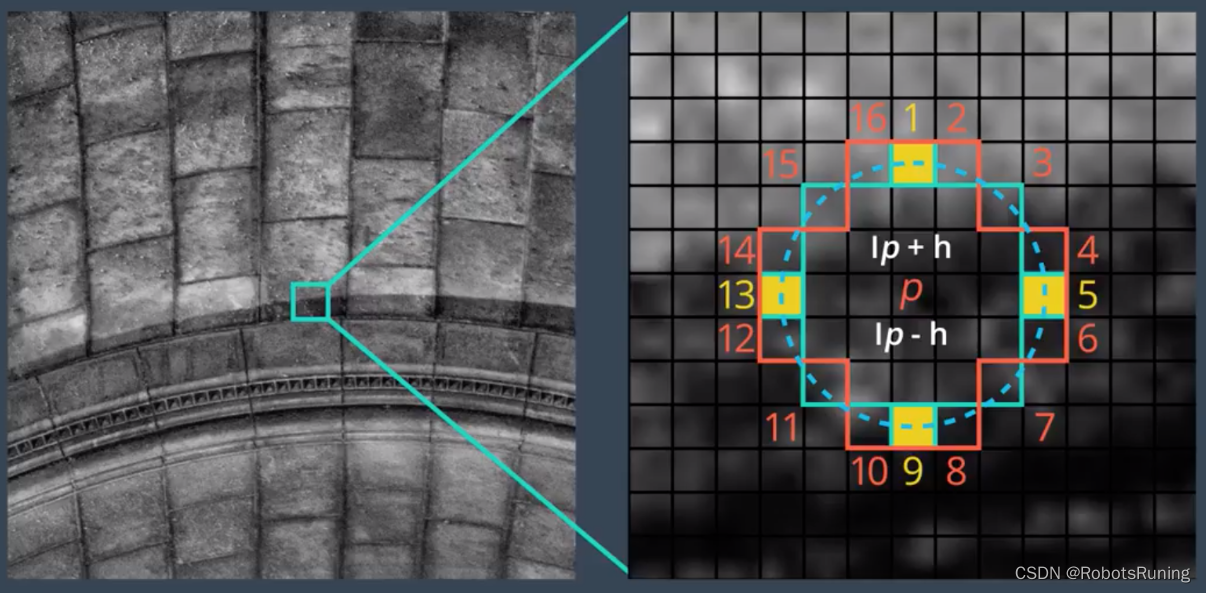
ORB (Oriented FAST and Rotated BRIEF)是一种在计算机视觉中广泛应用的特征检测和描述符算法。它的设计目的是为了快速、有效地提取图像中的关键点和描述符。在ORB的过程中,确实会涉及到提取圆形区域的操作,这主要出于以下的原因:
-
旋转不变性:在真实的图像处理任务中,我们往往需要处理旋转、缩放等各种复杂的图像变换。如果我们在一个小的矩形区域内提取特征,那么当图像旋转时,这个矩形区域可能就无法正确地捕捉到特征点的信息。而如果我们取一个圆形的区域,由于圆形在任何方向上都是对称的,因此它可以在图像旋转时保持特征的一致性。这就使得ORB能够在处理旋转图像时表现得更为稳定。
-
灵活性:圆形区域可以更好地适应各种形状的特征点。相比于方形区域,相同半径下圆形区域不仅可以覆盖到更多的像素,而且在处理边缘、角点等不规则特征时能够提供更多的信息。
-
计算效率:尽管在一开始看起来,在图像中提取圆形区域可能会比提取方形区域更为复杂,但其实通过一些优化的方法,我们可以高效地实现这个操作。例如,我们可以预先计算出一些固定半径的圆形区域模板,然后在需要提取圆形区域时直接使用这些模板。这样就可以大大减少实际的计算开销。
这就是为什么在计算ORB特征点时,我们会选择提取圆形而不是方形像素区域的主要原因。