硬件介绍
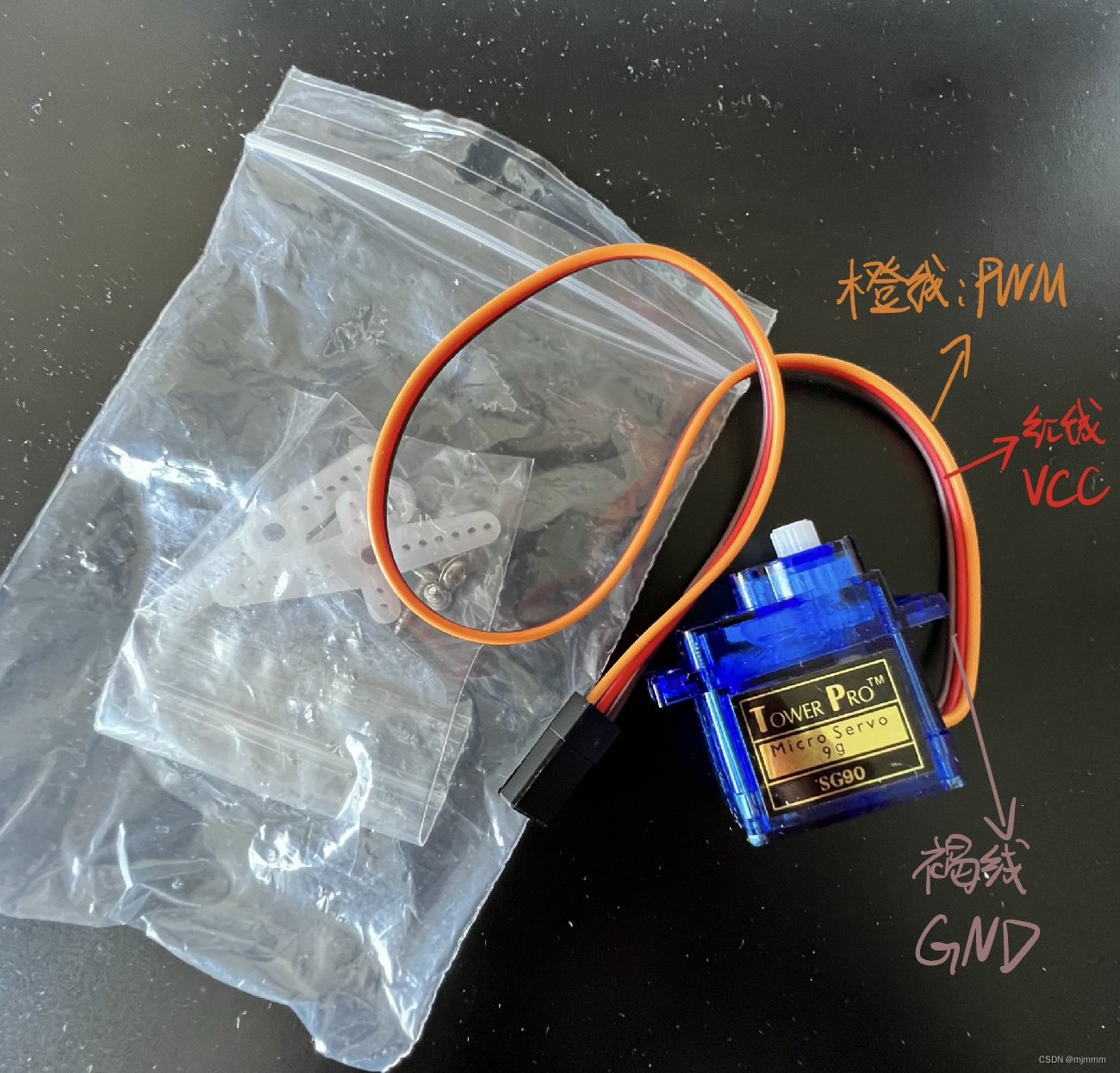
SG90舵机
如上图所示的舵机SG90,橙线对应PWM信号,而PWM波的频率不能太高,大约50Hz,即周期0.02s,20ms左右。在20ms的周期内,高电平占多少秒和舵机转到多少度的关系如下:
0.5ms-----0度;2.5%对应函数中占空比为250
1.0ms-----45度;5.0%对应函数中占空比为500
1.5ms-----90度;7.5%对应函数中占空比为750
2.0ms-----135度;10.0%对应函数中占空比为1000
2.5ms-----180度;12.5%对应函数中占空比为1250
震动传感器
产生震动时,会输出低电平,绿色指示灯亮(开关信号指示灯)

蜂鸣器
低电平触发

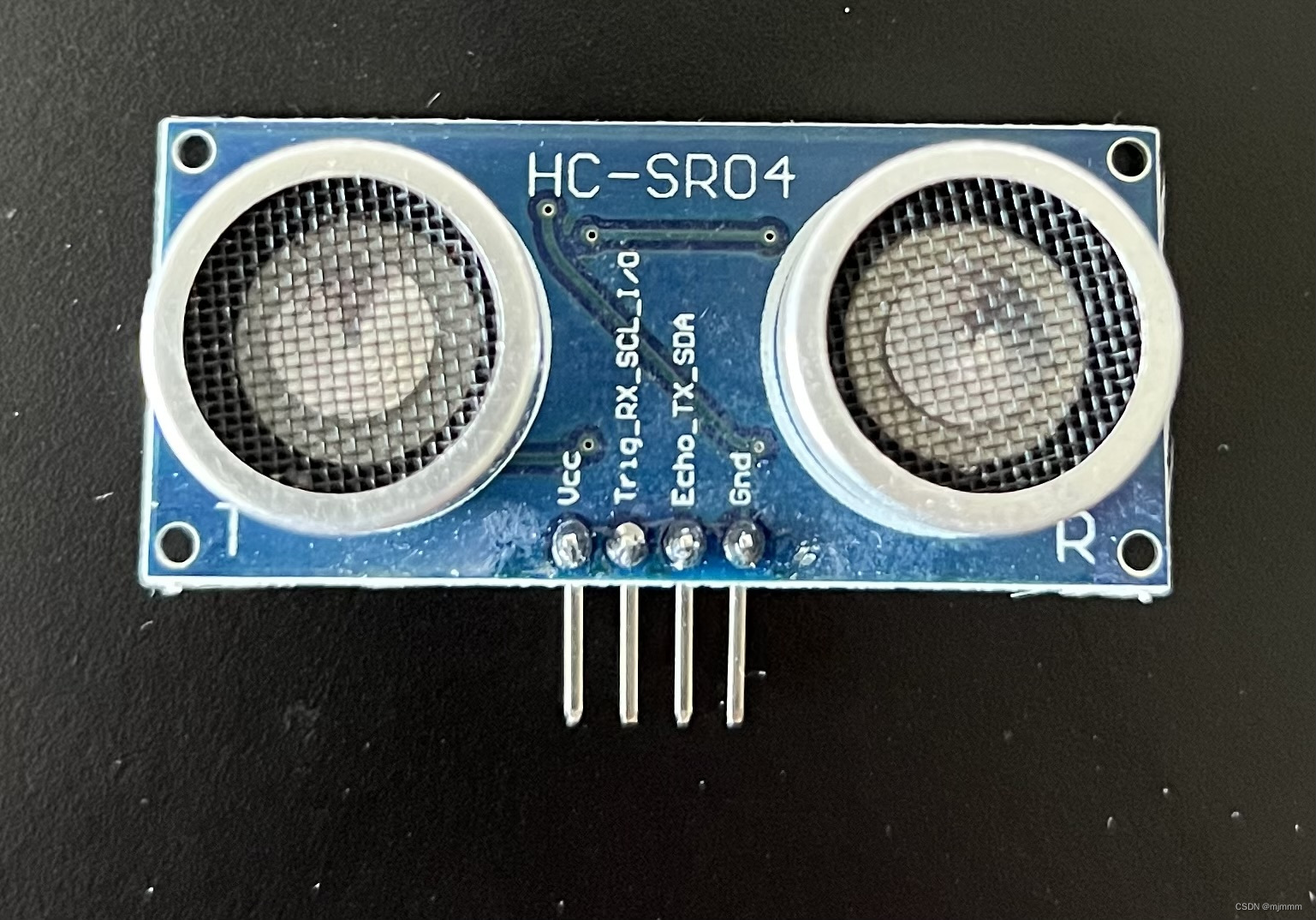
超声波传感器
使用方式见之前的博客
项目要求
检测靠近时,垃圾桶自动开盖并伴随滴一声,2秒后关盖
发生震动时,垃圾桶自动开盖并伴随滴一声,2秒后关盖
按下按键时,垃圾桶自动开盖并伴随滴一声,2秒后关盖
使用STM32控制舵机SG90
已知,舵机的驱动要使用周期20ms左右的PWM波,并通过调整占空比x来控制舵机的角度:
那如果我现在想要让舵机每隔1S转动一个角度,使得角度为0,45,90,135,180,0度。
那就可以使用我上节实现呼吸灯的CubeMX项目,对其进行修改:
1. 由于舵机中角度的计算是和高电平占周期的比例来换算的,所以要将CH Polarity改为High
![]()
2. 由于舵机需要的PWM的周期是20ms,则可以设置PSC = 7199, ARR = 199,这样当Tclk = 72M时,周期正好是0.02s,即20ms。

3. 这就设置好了,更新项目并打开Keil,修改main.c中的main函数,CCRx为(ARR的199对应20ms,那0.5ms就对应199/40)约等于 5 时对应0度,10对应45度,15对应90度,20对应135度,25对应180度。
HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_3); //打开Timer4的3号Channel
while (1)
{
HAL_Delay(1000);
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 5); //0度
HAL_Delay(1000);
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 10); //45度
HAL_Delay(1000);
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 15); //90度
HAL_Delay(1000);
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 20); //135度
HAL_Delay(1000);
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 25); //180度
}
实现效果:(由于之前在用89C52做小车的时候,我已经把舵机和无线测距模块用热熔胶固定在小车上了,所以只看效果就可以)
使用STM32控制无线测距模块HC-SR04
HC-SR04的开发逻辑在之前的章节里已经非常详细的介绍过了,这里直接开始实践:
将Trig接入PB6;Echo接入PB7,然后依然可以在刚刚舵机的CubeMX项目基础上修改:
1. 在之前的基础上,再使用一个TIM2,并且只用来作为计数功能,并软件控制何时停止计数,因此只需要设置TIM2的PSC而不需要设置ARR
值得一提的是,在89C52的使用中,驱动HC-SR04是Trig给至少10毫秒的高电平,所以我一开始是直接用HAL_Delay(20)来驱动的,但是我发现不行,所以很神奇的一件事情是,当使用STM32来驱动HC-SR04的时候,Trig的有效驱动又变回微秒级的了。。。
计数一次经过的时间是 (PSC + 1) / Tclk , 因此如果我想要计数1微秒,即0.000001s, 已知Tclk = 72 000 000, 那么PSC就应该设置为 71。然后在main.c中就可以定义出一个实现微秒级延时的函数:
//使用TIM2来做us级延时函数 void TIM2_Delay_us(uint16_t n_us) { /* 使能定时器2计数 */ __HAL_TIM_ENABLE(&htim2); __HAL_TIM_SetCounter(&htim2, 0); while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) ); /* 关闭定时器2计数 */ __HAL_TIM_DISABLE(&htim2); }

然后,只要将PB6设置成GPIO_output(Trig是单片机发给HCSR04的信号), 将PB7设置成GPIO_input(Echo是HCSR04发回单片机的信号)就可以了:

2. 这就配置好了,HC-SR04的控制主要是在KEIL中自主实现的代码,其实思路和51的时候是一样一样的:
我现在想要实现的效果就是,当检测到距离小于5cm时,使得舵机转到135度,持续两秒然后回来:
void TIM2_Delay_us(uint16_t n_us)
{
/* 使能定时器2计数 */
__HAL_TIM_ENABLE(&htim2);
__HAL_TIM_SetCounter(&htim2, 0);
while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) );
/* 关闭定时器2计数 */
__HAL_TIM_DISABLE(&htim2);
}
void StartHC()
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET); //Trig写0
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET); //Trig写1
TIM2_Delay_us(20); //持续20微妙
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET); //Trig写0
}
void deal_dist()
{
int cnt;
float dist;
StartHC();
while((HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7)) == GPIO_PIN_RESET); //等待Echo变高的一瞬间
HAL_TIM_Base_Start(&htim2); //TIM2开始计时
__HAL_TIM_SetCounter(&htim2,0); //将TIM2的计数器置0
while((HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7)) == GPIO_PIN_SET); //等待Echo变低的一瞬间
HAL_TIM_Base_Stop(&htim2); //TIM2停止计时
cnt = __HAL_TIM_GetCounter(&htim2);//求出计了多少次,由于计数一次经过的时间是1us
dist = cnt*340/2*0.000001*100; //求出距离
if(dist < 10){ //如果距离小于10cm
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 20); //135度
HAL_Delay(2000);
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 5); //0度
}else{
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 5); //0度
}
}
int main(void)
{
HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_3); //打开Timer4的3号Channel
while (1)
{
deal_dist();
HAL_Delay(200);
}
}实现效果:
感应开关盖垃圾桶实现
为了方便,就继续使用“mjm_test_PWM”的CubeMX项目文件!
在之前的基础上,要再额外加装震动传感器和蜂鸣器,将震动传感器的D0接到PB5; 蜂鸣器的I/O接到PB4。
打开CubeMX修改:
1.添加GPIO口,并把PB4先拉高,并设置中断触发方式

![]()


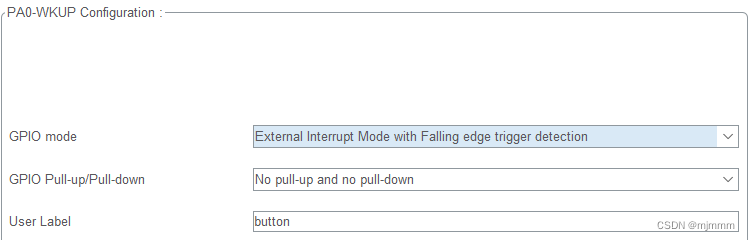
2. 打开中断,并设置优先级(把0的位置留给滴答定时器)

打开Keil修改:
打开stm32f1xx_it.c --> EXTI4(9_5)_IRQHandler() --> HAL_GPIO_EXTI_IRQHandler() --> HAL_GPIO_EXTI_Callback( )
HAL_GPIO_EXTI_Callback()就是中断处理程序,将他在main.c中重写:
注意,和电动车钥匙扣一样,因为要在中断函数中调用HAL_Delay,因此需要设置滴答定时器的优先级!!
void TIM2_Delay_us(uint16_t n_us)
{
/* 使能定时器2计数 */
__HAL_TIM_ENABLE(&htim2);
__HAL_TIM_SetCounter(&htim2, 0);
while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) );
/* 关闭定时器2计数 */
__HAL_TIM_DISABLE(&htim2);
}
void beep()
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_4, GPIO_PIN_RESET); //蜂鸣器响
HAL_Delay(200);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_4, GPIO_PIN_SET); //蜂鸣器停
}
void StartHC()
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET); //Trig写0
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET); //Trig写1
//HAL_Delay(10);
TIM2_Delay_us(20);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET); //Trig写0
}
void deal_dist()
{
int cnt;
float dist;
StartHC();
while((HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7)) == GPIO_PIN_RESET); //等待Echo变高的一瞬间
HAL_TIM_Base_Start(&htim2); //TIM2开始计时
__HAL_TIM_SetCounter(&htim2,0); //将TIM2的计数器置0
while((HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7)) == GPIO_PIN_SET); //等待Echo变低的一瞬间
HAL_TIM_Base_Stop(&htim2); //TIM2停止计时
cnt = __HAL_TIM_GetCounter(&htim2);//求出计了多少次,由于计数一次经过的时间是1us
dist = cnt*340/2*0.000001*100; //求出距离
if(dist < 10){ //如果距离小于10cm
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 20); //135度
beep();
HAL_Delay(2000);
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 5); //0度
}else{
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 5); //0度
}
}
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == GPIO_PIN_5){ //震动导致的中断
if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_5) == GPIO_PIN_RESET){ //这个判断很重要
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 20); //135度
beep();
HAL_Delay(2000);
//__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 5); //0度 //不需要,因为main中的while一直再检测,如果震动之后,检测到有靠近,依然需要开盖;如果没有靠近,main里面的deal_dist函数也会关闭盖子
}
}
if(GPIO_Pin == GPIO_PIN_0){ //按钮导致的中断
HAL_Delay(50); //在检测到按键被按下的低电平的时候,先延迟50ms,再进行判断
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET){ //如果延迟过后依然是低电平
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 20); //135度
beep();
HAL_Delay(2000);
//__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_3, 5); //0度 //不需要,因为main中的while一直再检测,如果按键之后,检测到有靠近,依然需要开盖;如果没有靠近,main里面的deal_dist函数也会关闭盖子
}
}
}
int main(void)
{
HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_3); //打开Timer4的3号Channel
HAL_NVIC_SetPriority(SysTick_IRQn,0,0); //必须写在" SystemClock_Config() "后面!!!
while (1)
{
deal_dist();
HAL_Delay(200); //这句延迟也很重要
}
}
实现效果
可见,不管是距离小于10cm;震动发生;还是按钮按下,都可以触发舵机的转动,蜂鸣器的滴滴声,以及两秒后舵机的归位。(由于舵机在之前做小车的时候用热熔胶固定了,所以只要功能实现了就好,别太纠结长啥样!)