概述
前几节课程已经单独驱动了数码管和RTC,同时已经整合成了能够用数码管显示具体时间,但是无法修改时间,这节就来配置使用按键修改具体的日期。
硬件准备
首先需要准备一个开发板,这里我准备的是芯片型号R7FA2E1A72DFL的开发板:


视频教程
https://www.bilibili.com/video/BV1t14y1o7ZG/
电子时钟制作(7)----按键修改数码管时间
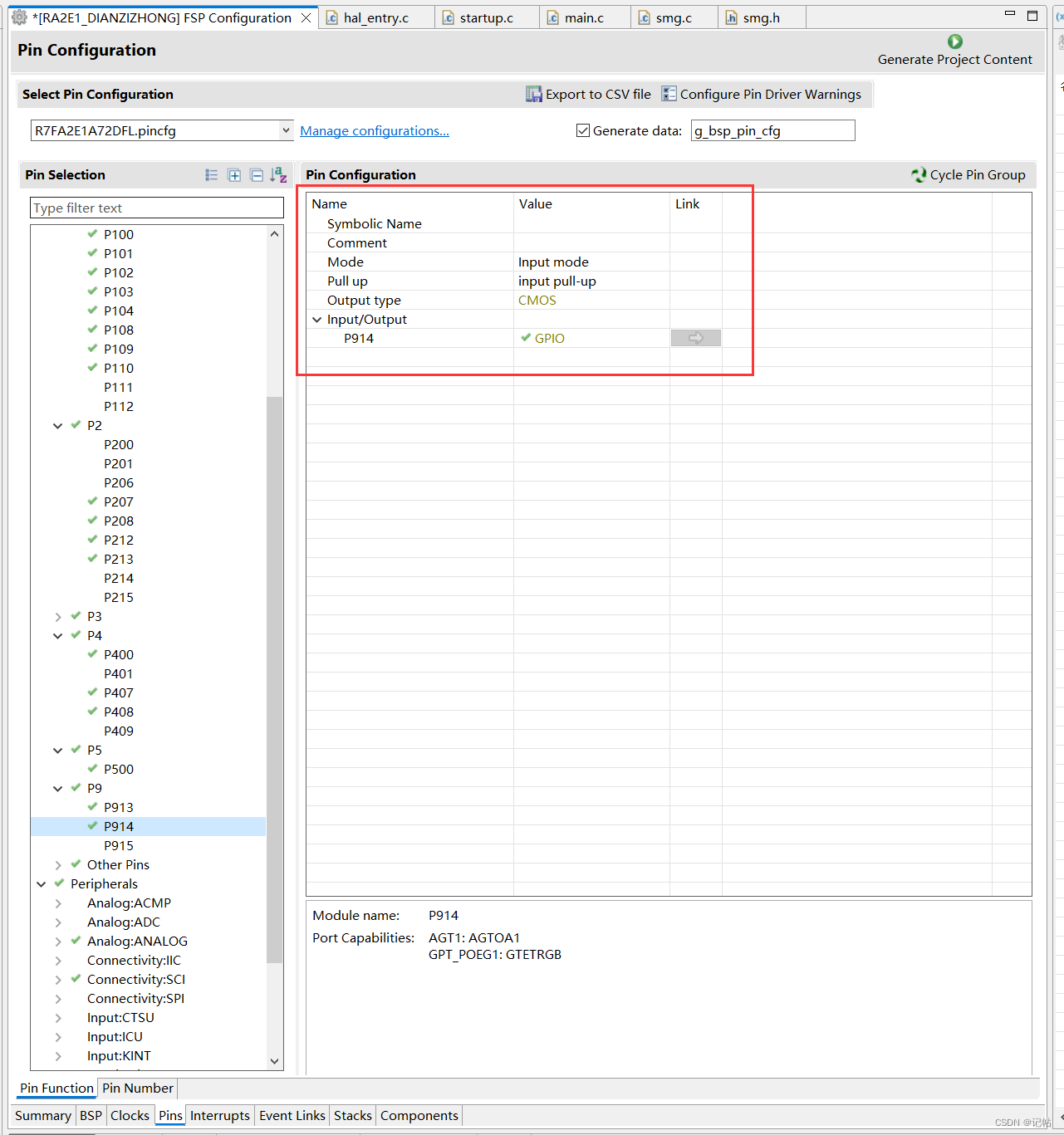
配置按键管脚
这里的按键对应管脚如下所示。
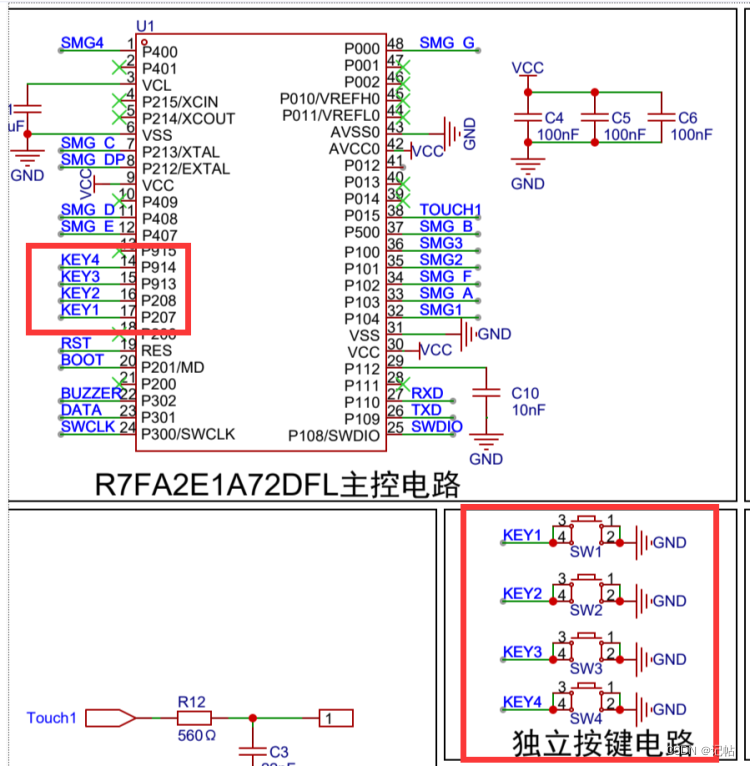
配置管脚为输入模式,同时加个上拉,这样默认电平为高电平,按键按下对应管脚为低电平。
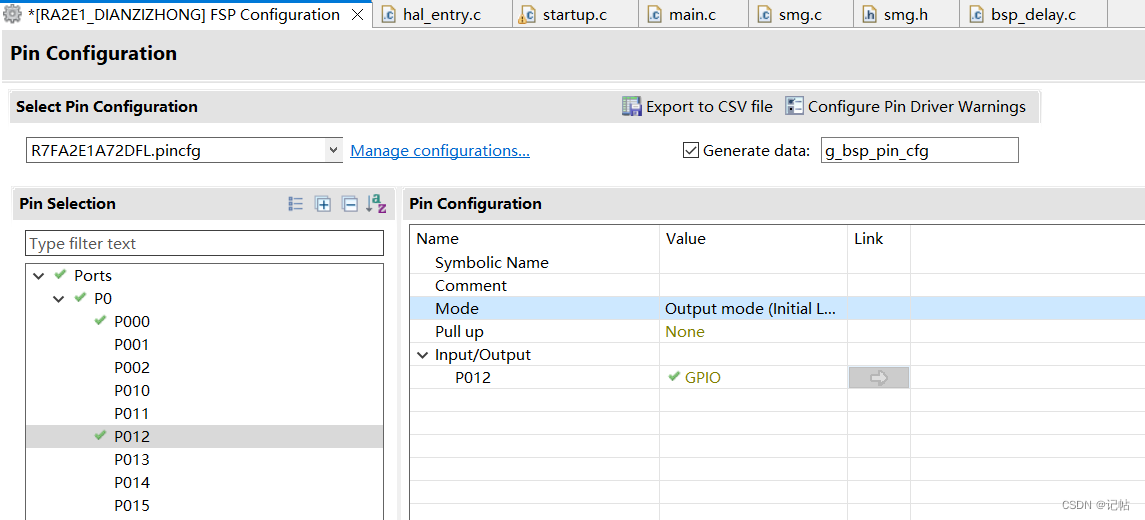
配置蜂鸣器管脚(先不配置)
这里的蜂鸣器对应管脚如下所示。
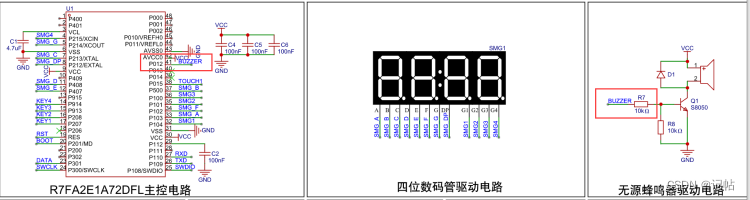
配置P012管脚为输出模式,这样默认电平为低电平,需要蜂鸣器响可以设置为高电平。
可以在开启时候蜂鸣器响一下进行提示。
R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_00_PIN_12, BSP_IO_LEVEL_HIGH) ;
R_BSP_SoftwareDelay(500U, BSP_DELAY_UNITS_MILLISECONDS);
R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_00_PIN_12, BSP_IO_LEVEL_LOW) ;
定义蜂鸣器交替鸣叫,这样可以在闹钟到了的时候进行提示或者功能修改时候进行提示。
//实现蜂鸣器交替鸣叫
void buzzer(void)
{
if(buzzer_num>0)
{
if(buzzer_num%40<20)
R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_00_PIN_12, BSP_IO_LEVEL_HIGH) ;
else
R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_00_PIN_12, BSP_IO_LEVEL_LOW) ;
buzzer_num--;
}
}
按键设置
可以用R_IOPORT_PinRead()函数进行读取IO口电平状态,该函数只能读取一个端口的电平。
定义变量保存按键状态。
bsp_io_level_t sw1;//按键SW1状态
bsp_io_level_t sw2;//按键SW2状态
bsp_io_level_t sw3;//按键SW3状态
bsp_io_level_t sw4;//按键SW4状态
bsp_io_level_t qe_sw;//触摸电容状态
int sw1_num1=0;//按键SW1计数值,去抖和长按短按判断
int sw2_num1=0;//按键SW2计数值,去抖和长按短按判断
int sw3_num1=0;//按键SW3计数值,去抖和长按短按判断
int sw4_num1=0;//按键SW4计数值,去抖和长按短按判断
int qe_sw_num1=0;//触摸按键计数值,去抖和长按短按判断
void qe_touch_sw(void);
//数码管显示状态,0正常显示,1修改小时,2修改分钟,3保存修改数据,4温度,5湿度
int smg_mode=0;
int sec=0,min=0,hour=0;//保存时间数据
uint16_t time_mode_num=0;//定时器刷新时间,实现闪烁效果
定义主程序的while循环为10ms执行一次,方便按键的读取以及时间设置。
R_BSP_SoftwareDelay(10U, BSP_DELAY_UNITS_MILLISECONDS);
在timer_smg.c中添加变量的定义。
//按键变量
extern bsp_io_level_t sw1;//按键SW1状态
extern bsp_io_level_t sw2;//按键SW2状态
extern bsp_io_level_t sw3;//按键SW3状态
extern bsp_io_level_t sw4;//按键SW4状态
extern bsp_io_level_t qe_sw;//触摸电容状态
extern int sw1_num1;//按键SW1计数值,去抖和长按短按判断
extern int sw2_num1;//按键SW2计数值,去抖和长按短按判断
extern int sw3_num1;//按键SW3计数值,去抖和长按短按判断
extern int sw4_num1;//按键SW4计数值,去抖和长按短按判断
extern int qe_sw_num1;//触摸按键计数值,去抖和长按短按判断
//数码管显示状态,0正常显示,1修改小时,2修改分钟,3保存修改数据,4温度,5湿度
extern int smg_mode;
extern int sec,min,hour;//保存时间数据
extern uint16_t time_mode_num;//定时器刷新时间,实现闪烁效果
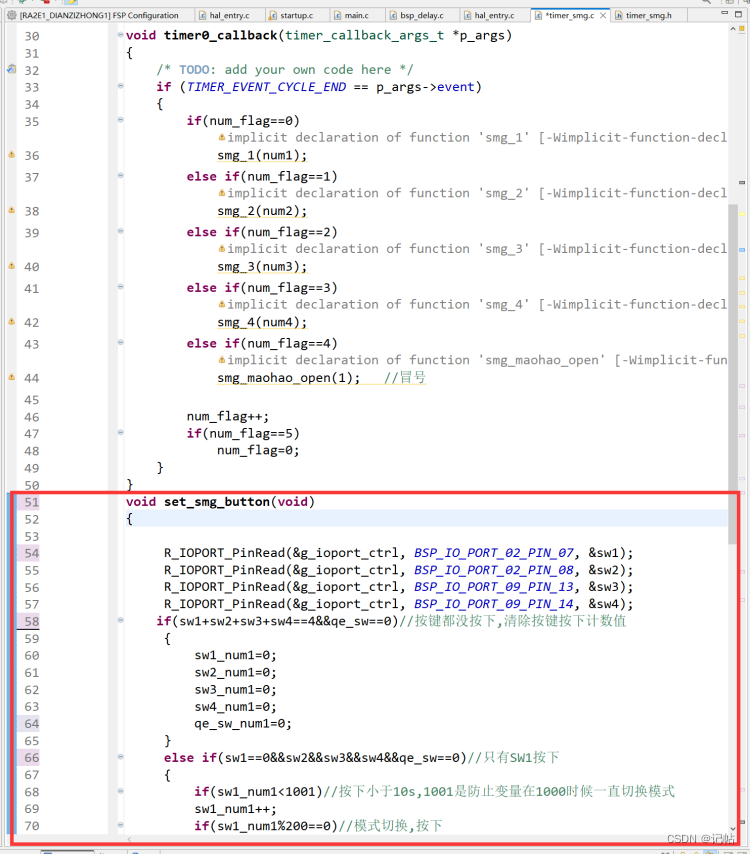
设置按sw1按键下1s进入下个模式,sw2进行时间小时和分钟的向下修改,sw3进行时间小时和分钟的向上修改。
void set_smg_button(void)
{
R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_02_PIN_07, &sw1);
R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_02_PIN_08, &sw2);
R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_09_PIN_13, &sw3);
R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_09_PIN_14, &sw4);
if(sw1+sw2+sw3+sw4==4&&qe_sw==0)//按键都没按下,清除按键按下计数值
{
sw1_num1=0;
sw2_num1=0;
sw3_num1=0;
sw4_num1=0;
qe_sw_num1=0;
}
else if(sw1==0&&sw2&&sw3&&sw4&&qe_sw==0)//只有SW1按下
{
if(sw1_num1<1001)//按下小于10s,1001是防止变量在1000时候一直切换模式
sw1_num1++;
if(sw1_num1%200==0)//模式切换,按下
{
//buzzer_num=20;//蜂鸣器叫200ms
if(smg_mode>2)
smg_mode=0;
else
smg_mode++;
}
if(smg_mode==6)
smg_mode=0;
}
else if(sw2==0&&sw1&&sw3&&sw4&&qe_sw==0)//只有SW2按下
{
if(sw2_num1<30)//300ms 减一次
sw2_num1++;
else
{
sw2_num1=0;
if(smg_mode==1)
{
if(hour>0)
hour--;
else
hour=23;
}
else if(smg_mode==2)
{
if(min>0)
min--;
else
min=59;
}
}
}
else if(sw3==0&&sw1&&sw2&&sw4&&qe_sw==0)//只有SW3按下
{
if(sw3_num1<30)//300ms 减一次
sw3_num1++;
else
{
sw3_num1=0;
if(smg_mode==1)
{
if(hour<23)
hour++;
else
hour=0;
}
else if(smg_mode==2)
{
if(min<59)
min++;
else
min=0;
}
}
}
}
在timer_smg.c中添加该函数。
同时需要在在timer_smg.h中声明。
void set_smg_button(void);//处理数码管显示,当前状态修改
由于需要修改我们的RTC时钟数值,需要引入定义RTC的结构体。
extern rtc_time_t set_time;//RTC时间定义
修改完毕之后可以在定时器种进行数码管闪烁来提示用户。
void timer0_callback(timer_callback_args_t *p_args)
{
/* TODO: add your own code here */
if (TIMER_EVENT_CYCLE_END == p_args->event)
{
time_mode_num++;
if(time_mode_num>200)
time_mode_num=0;
if(smg_mode==0)
{
if(num_flag==0)
smg_1(num1);
else if(num_flag==1)
smg_2(num2);
else if(num_flag==2)
smg_3(num3);
else if(num_flag==3)
smg_4(num4);
else if(num_flag==4)
smg_maohao_open(1); //冒号
}
else if(smg_mode==1)//修改时间小时
{
if(time_mode_num<100)
{
if(num_flag==0)
smg_1(hour/10);
else if(num_flag==1)
smg_2(hour%10);
else if(num_flag==2)
smg_3(min/10);
else if(num_flag==3)
smg_4(min%10);
else if(num_flag==4)
smg_maohao_open(1); //冒号
}
else
{
if(num_flag==0)
smg_1_close();
else if(num_flag==1)
smg_2_close();
else if(num_flag==2)
smg_3(min/10);
else if(num_flag==3)
smg_4(min%10);
else if(num_flag==4)
smg_maohao_open(1); //冒号
}
}
else if(smg_mode==2)//修改时间分钟
{
if(time_mode_num<100)
{
if(num_flag==0)
smg_1(hour/10);
else if(num_flag==1)
smg_2(hour%10);
else if(num_flag==2)
smg_3(min/10);
else if(num_flag==3)
smg_4(min%10);
else if(num_flag==4)
smg_maohao_open(1); //冒号
}
else
{
if(num_flag==0)
smg_1(hour/10);
else if(num_flag==1)
smg_2(hour%10);
else if(num_flag==2)
smg_3_close();
else if(num_flag==3)
smg_4_close();
else if(num_flag==4)
smg_maohao_open(1); //冒号
}
}
else if(smg_mode==3)//保存数据
{
set_time.tm_sec=sec;
set_time.tm_min =min;
set_time.tm_hour =hour ;
R_RTC_CalendarTimeSet(&g_rtc0_ctrl, &set_time);
smg_mode=0;
}
num_flag++;
if(num_flag==5)
num_flag=0;
}
}
初始化完毕的时候我们需要将时间数据保存下来。
sec=set_time.tm_sec;//时间数据 秒
min=set_time.tm_min;//时间数据 分钟
hour=set_time.tm_hour;//时间数据 小时
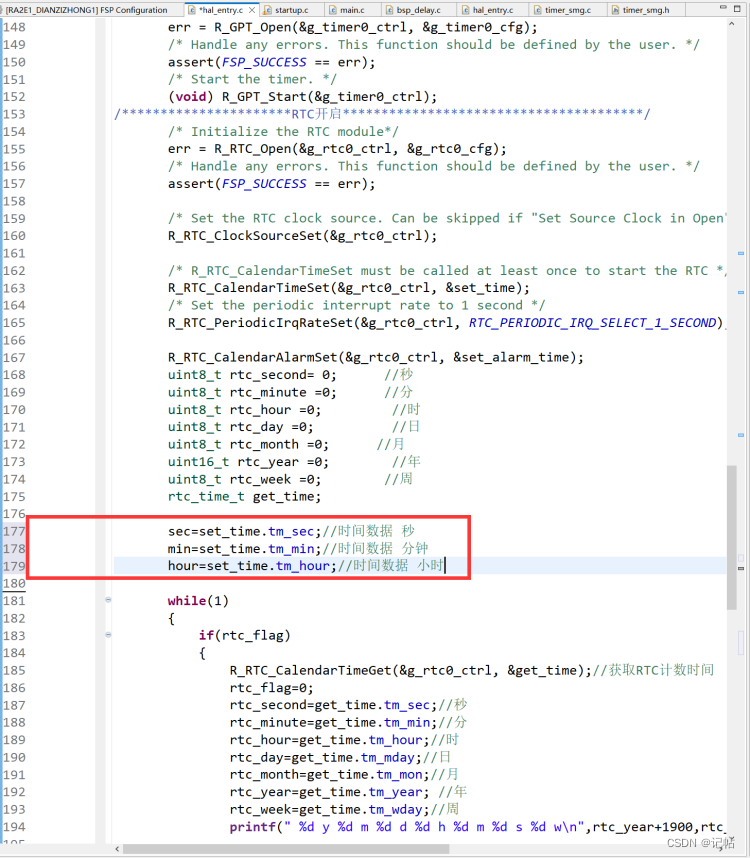
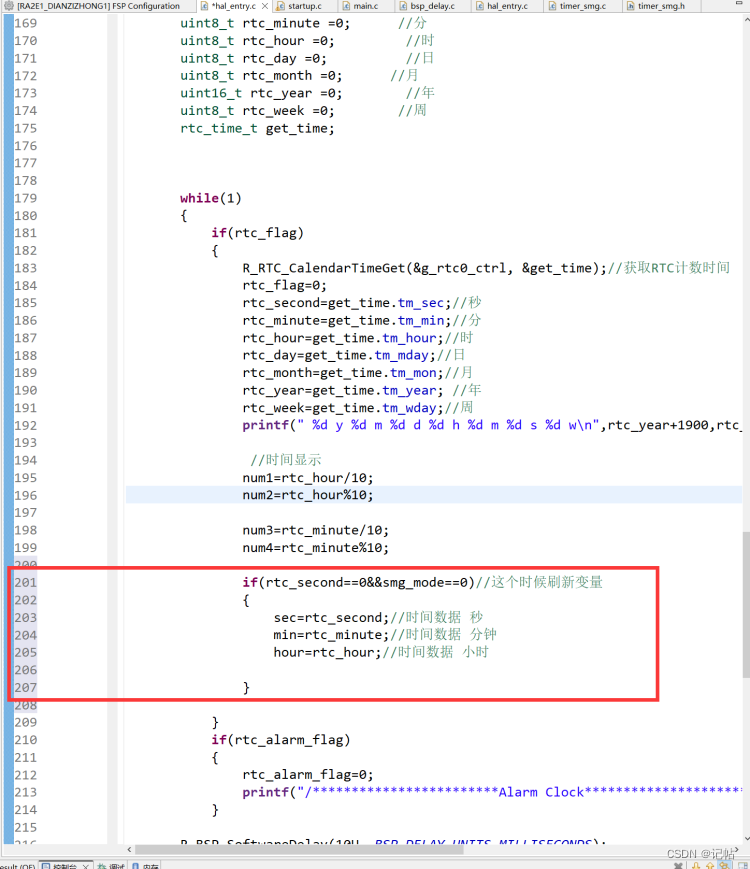
在主程序中,每当秒数为0时候,保存分钟和小时的数据到min与hour,方便在设置时间的时候进行读取以及设置完毕时间之后更新到RTC里面。
if(rtc_second==0&&smg_mode==0)//这个时候刷新变量
{
sec=rtc_second;//时间数据 秒
min=rtc_minute;//时间数据 分钟
hour=rtc_hour;//时间数据 小时
}
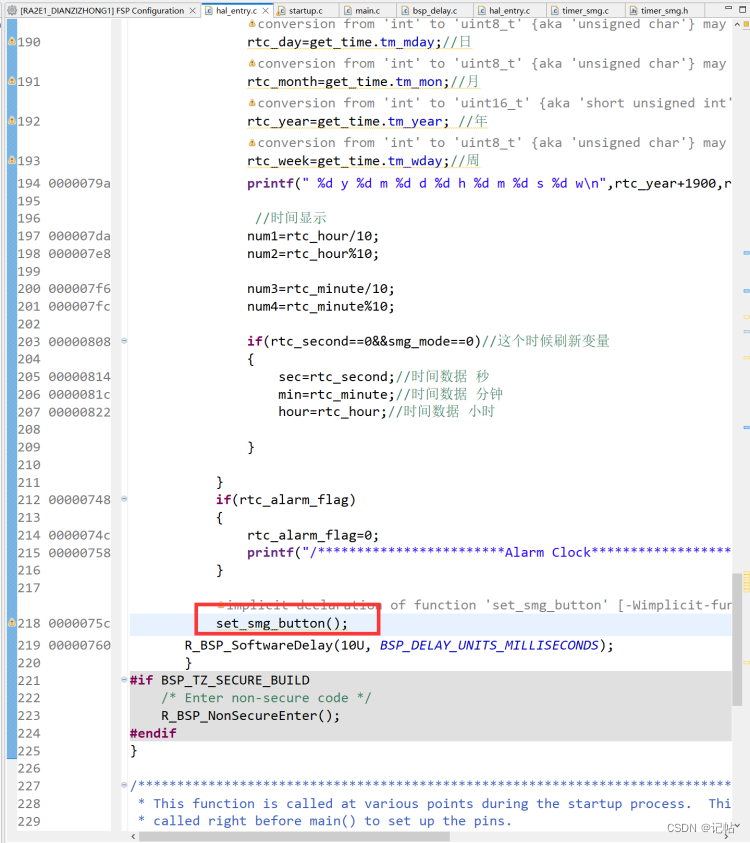
在主程序中加入按键处理函数。
set_smg_button();
主程序
#include "hal_data.h"
#include <stdio.h>
#include "smg.h"
#include "timer_smg.h"
FSP_CPP_HEADER
void R_BSP_WarmStart(bsp_warm_start_event_t event);
FSP_CPP_FOOTER
//数码管变量
uint8_t num1=1,num2=4,num3=6,num4=8;//4个数码管显示的数值
uint8_t num_flag=0;//4个数码管和冒号轮流显示,一轮刷新五次
//RTC变量
/* rtc_time_t is an alias for the C Standard time.h struct 'tm' */
rtc_time_t set_time =
{
.tm_sec = 50, /* 秒,范围从 0 到 59 */
.tm_min = 59, /* 分,范围从 0 到 59 */
.tm_hour = 23, /* 小时,范围从 0 到 23*/
.tm_mday = 29, /* 一月中的第几天,范围从 0 到 30*/
.tm_mon = 11, /* 月份,范围从 0 到 11*/
.tm_year = 123, /* 自 1900 起的年数,2023为123*/
.tm_wday = 6, /* 一周中的第几天,范围从 0 到 6*/
// .tm_yday=0, /* 一年中的第几天,范围从 0 到 365*/
// .tm_isdst=0; /* 夏令时*/
};
//RTC闹钟变量
rtc_alarm_time_t set_alarm_time=
{
.time.tm_sec = 58, /* 秒,范围从 0 到 59 */
.time.tm_min = 59, /* 分,范围从 0 到 59 */
.time.tm_hour = 23, /* 小时,范围从 0 到 23*/
.time.tm_mday = 29, /* 一月中的第几天,范围从 1 到 31*/
.time.tm_mon = 11, /* 月份,范围从 0 到 11*/
.time.tm_year = 123, /* 自 1900 起的年数,2023为123*/
.time.tm_wday = 6, /* 一周中的第几天,范围从 0 到 6*/
.sec_match = 1,//每次秒到达设置的进行报警
.min_match = 0,
.hour_match = 0,
.mday_match = 0,
.mon_match = 0,
.year_match = 0,
.dayofweek_match = 0,
};
bsp_io_level_t sw1;//按键SW1状态
bsp_io_level_t sw2;//按键SW2状态
bsp_io_level_t sw3;//按键SW3状态
bsp_io_level_t sw4;//按键SW4状态
bsp_io_level_t qe_sw;//触摸电容状态
int sw1_num1=0;//按键SW1计数值,去抖和长按短按判断
int sw2_num1=0;//按键SW2计数值,去抖和长按短按判断
int sw3_num1=0;//按键SW3计数值,去抖和长按短按判断
int sw4_num1=0;//按键SW4计数值,去抖和长按短按判断
int qe_sw_num1=0;//触摸按键计数值,去抖和长按短按判断
void qe_touch_sw(void);
//数码管显示状态,0正常显示,1修改小时,2修改分钟,3保存修改数据,4温度,5湿度
int smg_mode=0;
int sec=0,min=0,hour=0;//保存时间数据
uint16_t time_mode_num=0;//定时器刷新时间,实现闪烁效果
//RTC回调函数
volatile bool rtc_flag = 0;//RTC延时1s标志位
volatile bool rtc_alarm_flag = 0;//RTC闹钟
/* Callback function */
void rtc_callback(rtc_callback_args_t *p_args)
{
/* TODO: add your own code here */
if(p_args->event == RTC_EVENT_PERIODIC_IRQ)
rtc_flag=1;
else if(p_args->event == RTC_EVENT_ALARM_IRQ)
rtc_alarm_flag=1;
}
fsp_err_t err = FSP_SUCCESS;
volatile bool uart_send_complete_flag = false;
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i<size;i++)
{
__io_putchar(*pBuffer++);
}
return size;
}
/*******************************************************************************************************************//**
* main() is generated by the RA Configuration editor and is used to generate threads if an RTOS is used. This function
* is called by main() when no RTOS is used.
**********************************************************************************************************************/
void hal_entry(void)
{
/* TODO: add your own code here */
/* Open the transfer instance with initial configuration. */
err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg);
assert(FSP_SUCCESS == err);
/**********************数码管测试***************************************/
// ceshi_smg();
/**********************定时器开启***************************************/
/* Initializes the module. */
err = R_GPT_Open(&g_timer0_ctrl, &g_timer0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
/* Start the timer. */
(void) R_GPT_Start(&g_timer0_ctrl);
/**********************RTC开启***************************************/
/* Initialize the RTC module*/
err = R_RTC_Open(&g_rtc0_ctrl, &g_rtc0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
/* Set the RTC clock source. Can be skipped if "Set Source Clock in Open" property is enabled. */
R_RTC_ClockSourceSet(&g_rtc0_ctrl);
/* R_RTC_CalendarTimeSet must be called at least once to start the RTC */
R_RTC_CalendarTimeSet(&g_rtc0_ctrl, &set_time);
/* Set the periodic interrupt rate to 1 second */
R_RTC_PeriodicIrqRateSet(&g_rtc0_ctrl, RTC_PERIODIC_IRQ_SELECT_1_SECOND);
R_RTC_CalendarAlarmSet(&g_rtc0_ctrl, &set_alarm_time);
uint8_t rtc_second= 0; //秒
uint8_t rtc_minute =0; //分
uint8_t rtc_hour =0; //时
uint8_t rtc_day =0; //日
uint8_t rtc_month =0; //月
uint16_t rtc_year =0; //年
uint8_t rtc_week =0; //周
rtc_time_t get_time;
sec=set_time.tm_sec;//时间数据 秒
min=set_time.tm_min;//时间数据 分钟
hour=set_time.tm_hour;//时间数据 小时
while(1)
{
if(rtc_flag)
{
R_RTC_CalendarTimeGet(&g_rtc0_ctrl, &get_time);//获取RTC计数时间
rtc_flag=0;
rtc_second=get_time.tm_sec;//秒
rtc_minute=get_time.tm_min;//分
rtc_hour=get_time.tm_hour;//时
rtc_day=get_time.tm_mday;//日
rtc_month=get_time.tm_mon;//月
rtc_year=get_time.tm_year; //年
rtc_week=get_time.tm_wday;//周
printf(" %d y %d m %d d %d h %d m %d s %d w\n",rtc_year+1900,rtc_month,rtc_day,rtc_hour,rtc_minute,rtc_second,rtc_week);
//时间显示
num1=rtc_hour/10;
num2=rtc_hour%10;
num3=rtc_minute/10;
num4=rtc_minute%10;
if(rtc_second==0&&smg_mode==0)//这个时候刷新变量
{
sec=rtc_second;//时间数据 秒
min=rtc_minute;//时间数据 分钟
hour=rtc_hour;//时间数据 小时
}
}
if(rtc_alarm_flag)
{
rtc_alarm_flag=0;
printf("/************************Alarm Clock********************************/\n");
}
set_smg_button();
R_BSP_SoftwareDelay(10U, BSP_DELAY_UNITS_MILLISECONDS);
}
#if BSP_TZ_SECURE_BUILD
/* Enter non-secure code */
R_BSP_NonSecureEnter();
#endif
}
timer_smg.c
/*
* timer_smg.c
*
* Created on: 2023年7月3日
* Author: a8456
*/
#include "timer_smg.h"
//数码管变量
extern uint8_t num1,num2,num3,num4;//4个数码管显示的数值
extern uint8_t num_flag;//4个数码管和冒号轮流显示,一轮刷新五次
//按键变量
extern bsp_io_level_t sw1;//按键SW1状态
extern bsp_io_level_t sw2;//按键SW2状态
extern bsp_io_level_t sw3;//按键SW3状态
extern bsp_io_level_t sw4;//按键SW4状态
extern bsp_io_level_t qe_sw;//触摸电容状态
extern int sw1_num1;//按键SW1计数值,去抖和长按短按判断
extern int sw2_num1;//按键SW2计数值,去抖和长按短按判断
extern int sw3_num1;//按键SW3计数值,去抖和长按短按判断
extern int sw4_num1;//按键SW4计数值,去抖和长按短按判断
extern int qe_sw_num1;//触摸按键计数值,去抖和长按短按判断
//数码管显示状态,0正常显示,1修改小时,2修改分钟,3保存修改数据,4温度,5湿度
extern int smg_mode;
extern int sec,min,hour;//保存时间数据
extern uint16_t time_mode_num;//定时器刷新时间,实现闪烁效果
extern rtc_time_t set_time;//RTC时间定义
void timer0_callback(timer_callback_args_t *p_args)
{
/* TODO: add your own code here */
if (TIMER_EVENT_CYCLE_END == p_args->event)
{
time_mode_num++;
if(time_mode_num>200)
time_mode_num=0;
if(smg_mode==0)
{
if(num_flag==0)
smg_1(num1);
else if(num_flag==1)
smg_2(num2);
else if(num_flag==2)
smg_3(num3);
else if(num_flag==3)
smg_4(num4);
else if(num_flag==4)
smg_maohao_open(1); //冒号
}
else if(smg_mode==1)//修改时间小时
{
if(time_mode_num<100)
{
if(num_flag==0)
smg_1(hour/10);
else if(num_flag==1)
smg_2(hour%10);
else if(num_flag==2)
smg_3(min/10);
else if(num_flag==3)
smg_4(min%10);
else if(num_flag==4)
smg_maohao_open(1); //冒号
}
else
{
if(num_flag==0)
smg_1_close();
else if(num_flag==1)
smg_2_close();
else if(num_flag==2)
smg_3(min/10);
else if(num_flag==3)
smg_4(min%10);
else if(num_flag==4)
smg_maohao_open(1); //冒号
}
}
else if(smg_mode==2)//修改时间分钟
{
if(time_mode_num<100)
{
if(num_flag==0)
smg_1(hour/10);
else if(num_flag==1)
smg_2(hour%10);
else if(num_flag==2)
smg_3(min/10);
else if(num_flag==3)
smg_4(min%10);
else if(num_flag==4)
smg_maohao_open(1); //冒号
}
else
{
if(num_flag==0)
smg_1(hour/10);
else if(num_flag==1)
smg_2(hour%10);
else if(num_flag==2)
smg_3_close();
else if(num_flag==3)
smg_4_close();
else if(num_flag==4)
smg_maohao_open(1); //冒号
}
}
else if(smg_mode==3)//保存数据
{
set_time.tm_sec=sec;
set_time.tm_min =min;
set_time.tm_hour =hour ;
R_RTC_CalendarTimeSet(&g_rtc0_ctrl, &set_time);
smg_mode=0;
}
num_flag++;
if(num_flag==5)
num_flag=0;
}
}
void set_smg_button(void)
{
R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_02_PIN_07, &sw1);
R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_02_PIN_08, &sw2);
R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_09_PIN_13, &sw3);
R_IOPORT_PinRead(&g_ioport_ctrl, BSP_IO_PORT_09_PIN_14, &sw4);
if(sw1+sw2+sw3+sw4==4&&qe_sw==0)//按键都没按下,清除按键按下计数值
{
sw1_num1=0;
sw2_num1=0;
sw3_num1=0;
sw4_num1=0;
qe_sw_num1=0;
}
else if(sw1==0&&sw2&&sw3&&sw4&&qe_sw==0)//只有SW1按下
{
if(sw1_num1<1001)//按下小于10s,1001是防止变量在1000时候一直切换模式
sw1_num1++;
if(sw1_num1%200==0)//模式切换,按下
{
//buzzer_num=20;//蜂鸣器叫200ms
if(smg_mode>2)
smg_mode=0;
else
smg_mode++;
}
if(smg_mode==6)
smg_mode=0;
}
else if(sw2==0&&sw1&&sw3&&sw4&&qe_sw==0)//只有SW2按下
{
if(sw2_num1<30)//300ms 减一次
sw2_num1++;
else
{
sw2_num1=0;
if(smg_mode==1)
{
if(hour>0)
hour--;
else
hour=23;
}
else if(smg_mode==2)
{
if(min>0)
min--;
else
min=59;
}
}
}
else if(sw3==0&&sw1&&sw2&&sw4&&qe_sw==0)//只有SW3按下
{
if(sw3_num1<30)//300ms 减一次
sw3_num1++;
else
{
sw3_num1=0;
if(smg_mode==1)
{
if(hour<23)
hour++;
else
hour=0;
}
else if(smg_mode==2)
{
if(min<59)
min++;
else
min=0;
}
}
}
}
timer_smg.h
/*
* timer_smg.h
*
* Created on: 2023年7月3日
* Author: a8456
*/
#ifndef TIMER_SMG_H_
#define TIMER_SMG_H_
#include "hal_data.h"
void set_smg_button(void);//处理数码管显示,当前状态修改
#endif /* TIMER_SMG_H_ */