引用量较高的一篇会议论文。
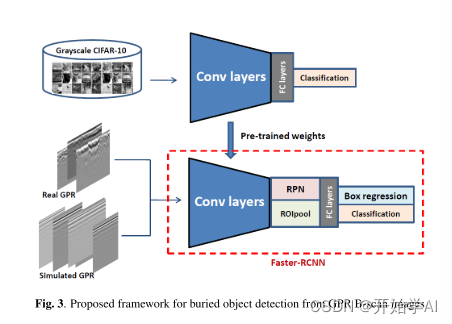
由于真实雷达图像较少,作者采用了GPR工具箱,使用不同配置,合成了部分模拟雷达图。然后采用Cifar-10数据(灰度图)对Faster RCNN进行预训练,再采用真实和合成数据进行微调。
论文地址https://arxiv.org/pdf/1803.08414.pdf
1、导言
探地雷达(GPR)是应用最广泛的地球物理探测技术之一,主要用于探测地下埋藏物,如地雷、管道或考古文物等。GPR系统在多个空间位置向地面发射电磁波,接收反射信号,形成地下二维高分辨率图像(b扫描雷达图)。在这些图像中,地下物体以双曲线特征出现。因此,对埋地物体的探测可以看作是探地雷达图像中反射双曲线的探测。
在这项工作中,我们想执行一个端到端框架从GPR b扫描双曲线检测。为此,我们应用了Faster-RCNN框架[10],该框架在计算机视觉领域已经证明了非常有效的性能。本文的贡献有三方面:1)首先使用灰度Cifar-10数据库定义和预训练CNN,然后将权值转移到fast - rcnn框架中;2)训练数据部分来自真实采集的探地雷达采集数据,部分来自gprMax工具箱[11]模拟雷达图;3)我们基于预先训练的权值对fast - rcnn进行训练和微调,并在模拟和真实数据上进行测试,以证明所提方法的有效性。
2、数据集
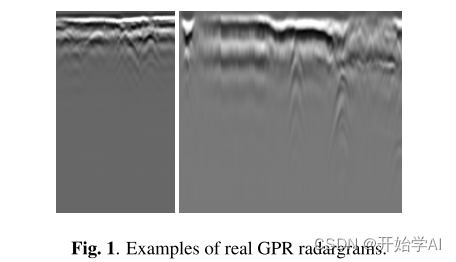
在这项工作中,我们利用了最近从法国几个地点收集的大约100个真实的b扫描数据,使用的是300兆赫兹的GPR天线。每次探测都有100ns深度的时间范围,可以穿透7米。在这些数据中,电磁信号在不同形状和材料的埋藏物体上的反射记录了双曲线特征。只有部分表面清晰、形状良好,而大部分表面对比度较弱、不对称,并受到土壤异质性和不同次表层间阻抗变化引起的噪声和杂波的干扰。图1显示了两个真实数据的例子,从中我们可以观察到一些不同大小的双曲线,它们受到很多噪音和杂波。
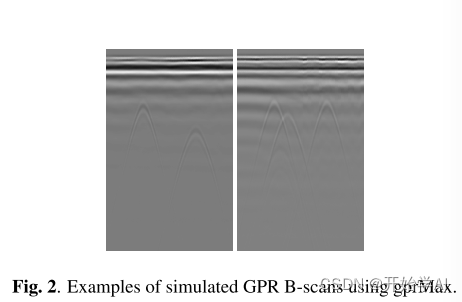
由于缺乏训练所需的真实数据,我们使用gprMax工具箱[11]生成了更多的GPR雷达图来模拟不同的场景。我们考虑了各种不同的配置,不同尺寸和材料的物体被放置在不同的位置和深度。设置相同天线频率300MHz,相同时间范围100ns进行仿真。然后在模拟图像中加入一些噪声,这些噪声是从真实数据中估计出来的。图2显示了两个模拟雷达图的例子,其中双曲线(通常形状良好)相交并有交叉尖头。在这项工作中,模拟了50个模拟雷达图,并将其添加到之前的真实数据中,以执行和评估所提出的框架。
3、方法
本文提出的方法由两个主要阶段组成,如图3所示:1)在灰度Cifar-10数据库上预训练设计的CNN;2)使用真实和模拟GPR数据训练和微调Faster-RCNN(基于预先训练的CNN权重)。
3.1、对CNN进行Cifar-10数据库的预训练
CNN通常由卷积层、池化层和全连接层组成。我们定义的CNN简单地包括3个大小为5 × 5像素的16、32和64个滤波器的卷积层(每个卷积层后面都有一个ReLu激活和一个大小为2 × 2像素的最大池化层)和一个全连接的64个神经元层。正如[9]中推荐的那样,我们选择了cifa -10(而不是ImageNet),因为图像大小较小(32 × 32像素),近似于研究的GPR图像中双曲线的大小。它可以在GPU有限的个人电脑上训练得更快更容易。此外,为了匹配单通道GPR数据,最好在灰度cifar10上训练CNN,而不是在颜色数据库上训练CNN。
3.2、在真实和模拟的探地雷达数据上训练Faster-RCNN
4、结果
为了在模拟和真实GPR数据上评估所提出的方法,测试了三种场景:
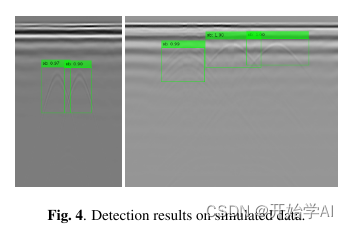
- 对模拟数据进行训练和测试;
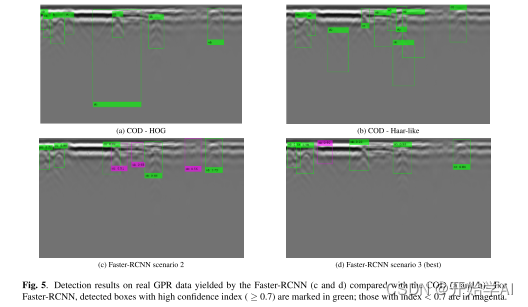
- 对真实数据进行培训和测试;
- 模拟+真实数据训练,真实数据测试。
对于真实数据,我们使用了60个雷达图用于训练,40个用于测试。对于模拟数据,40个用于训练,10个用于测试。
因此,在训练样本有限的情况下处理探地雷达数据是很有前途的。虽然所提出的方案的有效性已被定性观察到,但我们正在进行的工作现在集中在定量评估,以更好地验证。此外,还需要进一步研究双曲线坐标(顶点和尖头)的检测,以实现对被检测目标的精确定位。