💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🌈3 Matlab代码实现
🎉4 参考文献

💥1 概述
滤波分为线性滤波与非线性滤波,在信号处理、目标定位、海上目标探测、图像处理、无人机位姿解算[58l等领域发挥着重要的作用。文献[9]表明了线性高斯模型的最优滤波算法是卡尔曼滤波(Kalman Filter,KF),非线性模型的最优滤波算法是粒子滤波。由于人们生活的世界是非线性的,对抽象化得到的非线性模型进行处理,非线性滤波算法发挥了重要作用。滤波算法的发展由易入难,由线性发展到非线性,因此在进行非线性滤波算法的相关研究时,线性滤波算法的发展也需要进行一定的探讨。
1960年卡尔曼提出了经典的卡尔曼滤波,由于卡尔曼滤波实时性强,不需要存住堵大量的状态信息一经提出便得到了广泛的应用。但卡尔曼滤波算法基于高斯模型的假设,为了解决非线性滤波问题,人们相继提出了扩展卡尔曼滤波(Extended KF, EKF)与无过亦卡尔曼滤波(Unscented KF,UKF)算法。但EKF与UKF均要求状态模型满足高斯分布。上改世纪60年代,粒子滤波(Particle Filter, PF)算法被提出。粒子滤波不需要对系统模型斯假设,因此理论上比卡尔曼滤波应用更为广泛。但粒子滤波算法提出初期存在着粒拉子退化的问题,状态估计的精度受限没有得到广泛的应用"1。1993年Gordanl2提出了重采样算法,粒子滤波的相关研究迅速得到了发展。近年来,现代电子计算机技术飞速发展,粒子滤波算法也得到了越来越多的关注。在非线性非高斯动态系统模型中,粒
子滤波已成为主要的估计方法,并得到了广泛的应用。与国外同行相比,国内有关粒子滤波的研究起步较晚,但发展迅速并且取得了许多研究成果。由于目标跟踪与滤波技术应用。
状态估计是控制理论中的一个重要的研究点,状态估计指的是从混有噪声的信号中尽可能地恢复系统真实的状态。现代各种滤波技术的发展,使得估计问题发挥着越来越重要的作用,尤其是在信号处理、目标跟踪等领域。以目标跟踪为例进行阐述,目标跟踪需要从大量的量测数据中估计出系统的当前状态,量测噪声是无法完全消除的。估计的目的是从含有噪声的量测值中提取出有用信息,利用这些信息估计出系统的状态,使得估计的状态值与真实状态间误差满足方差最小的原则。根据量测值与估计值时间的顺序关系,可以将估计问题分为平滑、滤波和预测[3]。滤波是本论文研究的主要内容,即根据到目前时刻已有的量测值来估计出系统的状态值。根据系统状态模型的不同,
可以将估计问题分为线性估计与非线性估计。根据噪声类型的不同,可以将估计问题划分为
线性高斯估计、非线性高斯估计、线性非高斯估计和非线性非高斯估计。
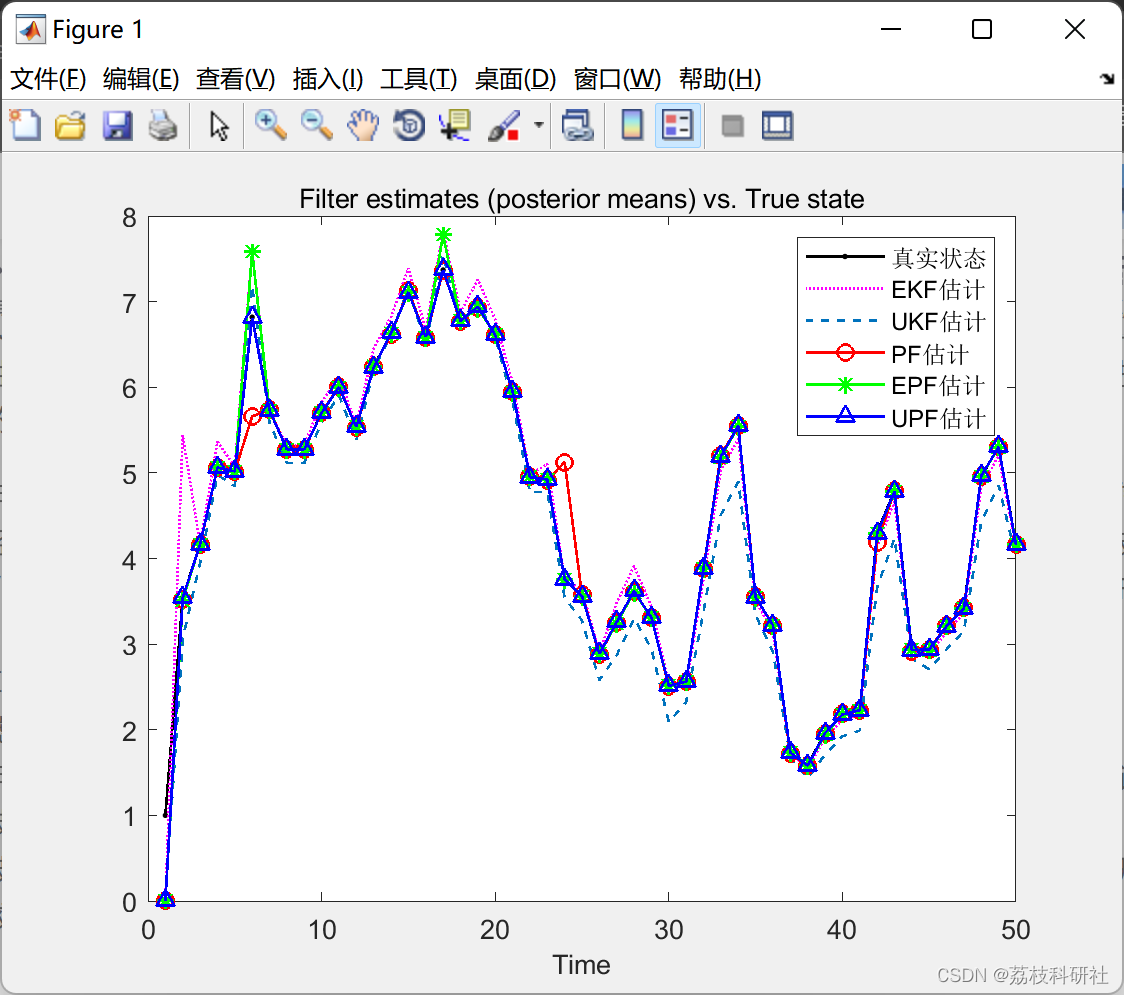
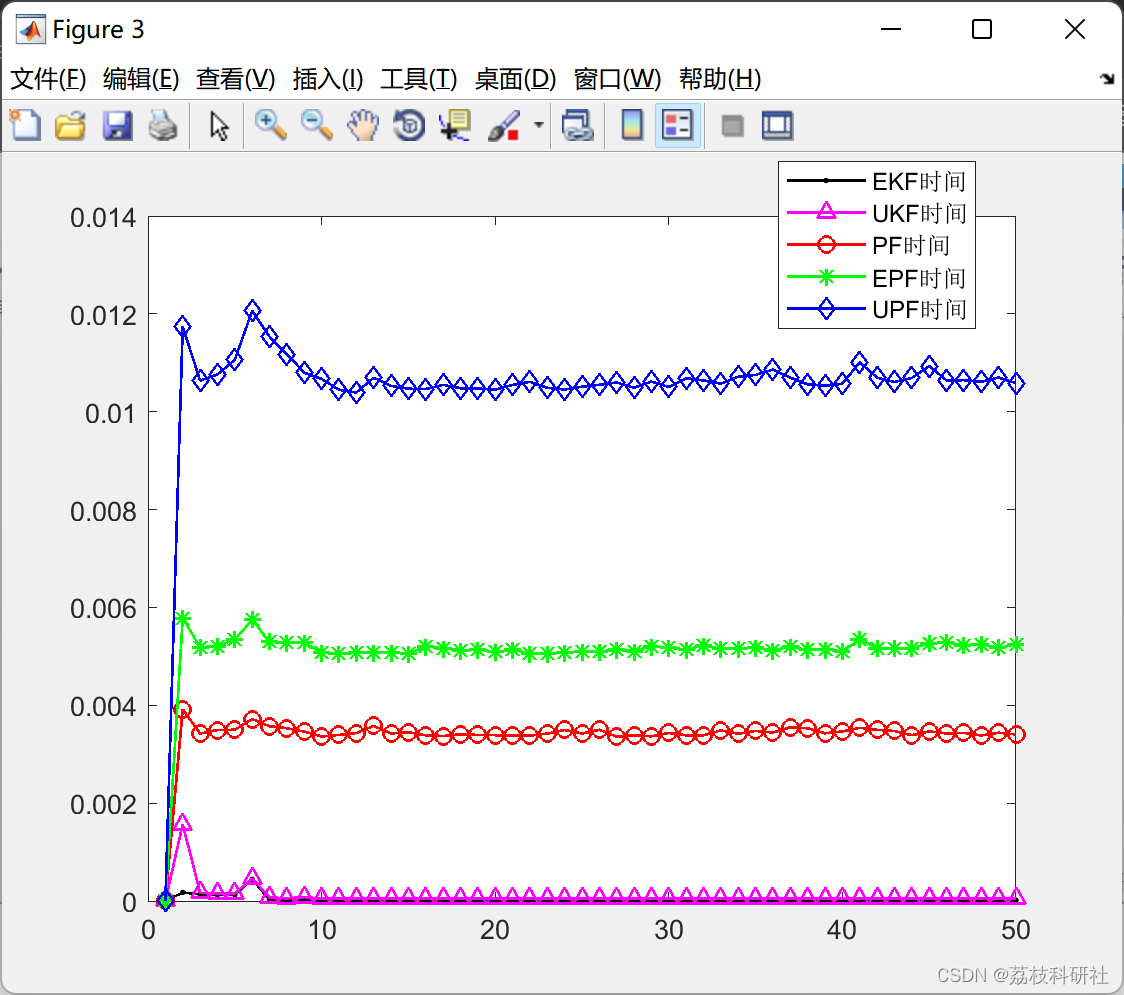
📚2 运行结果

🌈3 Matlab代码实现
🎉4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]陈菘. 改进的粒子滤波算法及其应用研究[D].江西理工大学,2021.DOI:10.27176/d.cnki.gnfyc.2021.000168.