一、前言
在Lora模块的程序设计中,串口通信一定是一个极其重要且常用的通信方式,借助串口通信,我们不但可以向外传输我们获取的数据,还可以根据外部指令做出相应。
同样的,在例程中,为我们提供了一个名为usart1-board.c的库,帮助我们更好更快的完成串口通信任务的开发。

二、代码实现
本文的任务是当取到的数据通过串口以ASCII格式向外发送,并通过串口调试助手接受来着上位机的指令做出对应的操作。
具体任务如下:
单片机间隔一秒向上位机发送光照数据,并记录发送次数,当收到来自上位机的复位指令FA 00 FB时,清空发送次数。
通过分析usart1-board.c库,我们常会使用下列方法:
void USART1_Init(uint32_t bound);
//初始化串口 bound为波特率
void USART1_SendStr(uint8_t *Data, uint16_t length);
//发送uint8_t类型数据数组 length为发送的长度
uint16_t USART1_ReadRxBuffer( uint8_t *payload);
//接受来自串口的内容并存入传入的数据数组内 返回接受到的数据长度代码示例:
#include <string.h>
#include "board.h"
#include "hal_key.h"
#include "tim-board.h"
#include "timer_handles.h"
#include "led_light.h"
#include "adc_reader.h"
#include <math.h> //library
#include <stdio.h>
#include "stm32l1xx_hal.h" // controller register definitions
#include "sht1x.h" // controller register definitions
#include "sht3x.h"
#include "usart1-board.h"
void Init() {
BoardInitMcu();
BoardInitPeriph();
keys_init();//按键初始化
setTimer2Callback(Time2Handler);
Tim2McuInit(1);//定时器初始化,设置定时中断1ms中断一次
};
int count=0;//用于记录发送次数
float temp=0,hum=0,light=0;
uint8_t data[30];
int main( void )
{
Init();
ADCS_Init();//初始化ADC
hal_temHumInit();//初始化温湿度模块
USART1_Init(115200);
while( 1 )
{
HAL_Delay(1000);//延时1000ms
memset(data,'\0',30);//清空数组内容
if(USART1_ReadRxBuffer(data)!=0)//如果接收到内容
{
if(data[0]==0xfa)//如果指令正确
if(data[1]==0x00)
if(data[2]==0xfb)
count=0;//计数器清零
}
AdcScanChannel();//更新通道值
light=((5.0/2.0)*AdcReadCh0())*100.0;//获取光照并通过公式计算
call_sht11(&temp,&hum);//获取温湿度
memset(data,'\0',30);//清空数组内容
sprintf((char *)data,"Count=%d,Light=%.2f Lx",count+1,light);//将内容存入数组
USART1_SendStr(data,30);//发送数据
count++;//发送完一次数据计数器增加
}
}
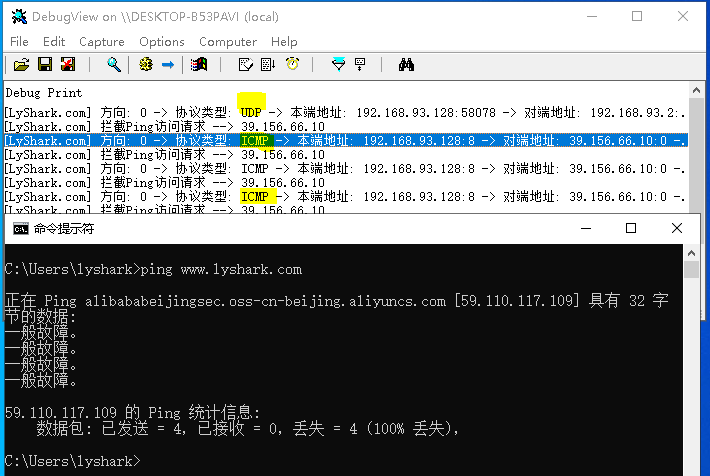
效果展示:
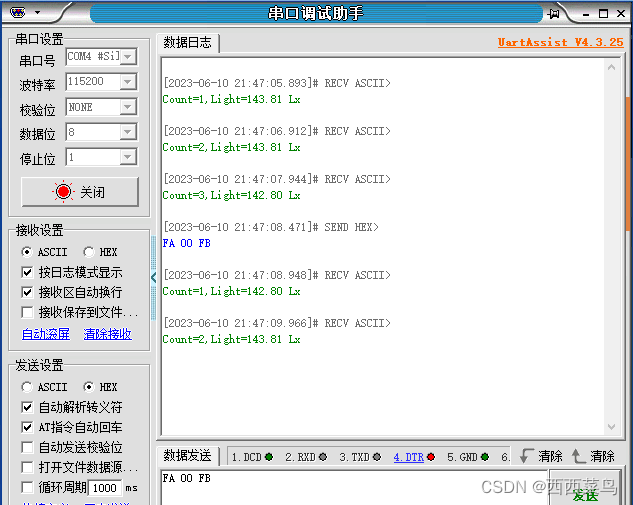
此时,我们已经完成了串口数据的接受与发送,但这仅仅是我们学习串口通信的基础。
串口通信的数据一般有两种解析的方式:ASCII、Hex。但其本质上都是以二进制传输的,不过是对数据的处理不同。
三、关于数据的处理
关于数据的处理,一般分为基础知识与数据解析,学习可以帮助我们完善编程的思维,更好更快的写出我们需要的程序。
如果你想要掌握,下面两篇文章是你必须熟悉的:
Zigbee、STM32单片机串口收发必会数据传输-uint8、uint16等数据的解析-串口传输多数据与解析-物联网
数据传输中的数据转换与处理的常用方法-物联网开发-单片机通信