目录
一、什么是点云
二、如何获取点云
1、三维激光扫描仪
2、双目相机
双目测距基本原理
视差图
双目测距的优点与难点
3、RGB-D相机
RGB-D什么意思
RGB-D相机的分类
RGBD相机的缺点:
RGBD相机的优点
三、点云有哪些研究方向
1、基于点云的分类
2、基于点云的分割
3、基于点云的目标检测
4、点云数据的增强和完整化
5、无人驾驶
一、什么是点云
3D点云基础知识 - 知乎
点云是某个坐标系下的点的数据集。
根据激光测量原理得到的点云,包括三维坐标(XYZ)和激光反射强度(Intensity),强度信息与目标的表面材质、粗糙度、入射角方向以及仪器的发射能量、激光波长有关。
根据摄影测量原理得到的点云,包括三维坐标(XYZ)和颜色信息(RGB)。
结合激光测量和摄影测量原理得到点云,包括三维坐标(XYZ)、激光反射强度(Intensity)和颜色信息(RGB)。
二、如何获取点云
点云不是通过普通的相机拍摄得到的,一般是通过三维成像传感器获得,比如双目相机、三维扫描仪、RGB-D 相机等。
1、三维激光扫描仪
有哪些种类的三维扫描仪? - 知乎
三维激光扫描仪按照扫描成像方式的不同,激光扫描仪可分为一维(单点)扫描仪、二维(线列)扫描仪和三维(面列)扫描仪。而按照不同工作原理来分类,可分为脉冲测距法(亦称时间差测量法)和三角测量法。
脉冲测距法:激光扫描仪由激光发射体向物体在时间 t1发送一束激光,由于物体表面可以反射激光,所以扫描仪的接收器会在时间 t2接收到反射激光。由光速 c,时间 t1,t2算出扫描仪与物体之间的距离d=(t2-t1)c/2。
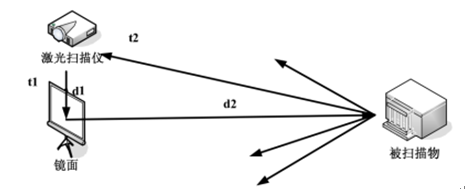
显而易见的,脉冲测距式3D激光扫描仪,其测量精度受到扫描仪系统准确地量测时间的限制。当用该方式测量近距离物体的时候,由于时间太短,就会产生很大误差。所以该方法比较适合测量远距离物体,如地形扫描,但是不适合于近景扫描。
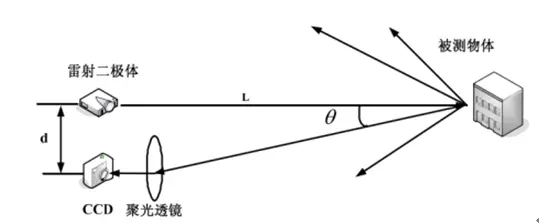
三角测距法:用一束激光以某一角度聚焦在被测物体表面,然后从另一角度对物体表面上的激光光斑进行成像,物体表面激光照射点的位置高度不同,所接受散射或反射光线的角度也不同,用 CCD(图像传感器)光电探测器测出光斑像的位置,就可以计算出主光线的角度θ 。然后结合己知激光光源与 CCD 之间的基线长度 d,经由三角形几何关系推求扫描仪与物体之间的距L≈dtanθ。
手持激光扫描仪通过上述的三角形测距法建构出3D图形:通过手持式设备,对待测物发射出激光光点或线性激光。以两个或两个以上的侦测器测量待测物的表面到手持激光产品的距离,通常还需要借助特定参考点-通常是具黏性、可反射的贴片-用来当作扫描仪在空间中定位及校准使用。这些扫描仪获得的数据,会被导入电脑中,并由软件转换成3D模型。
三角测量法的特点:结构简单、测量距离大、抗干扰、测量点小(几十微米)、测量准确度高。但是会受到学元件本身的精度、环境温度、激光束的光强和直径大小以及被测物体的表面特征等因素的影响。
2、双目相机
双目测距基本原理
双目测距原理_NineDays66的博客-CSDN博客
这个博客完整清晰地介绍了双目测距的整个流程及原理,以及介绍几种立体匹配算法的对比及参数调整,价值很高!!


视差图
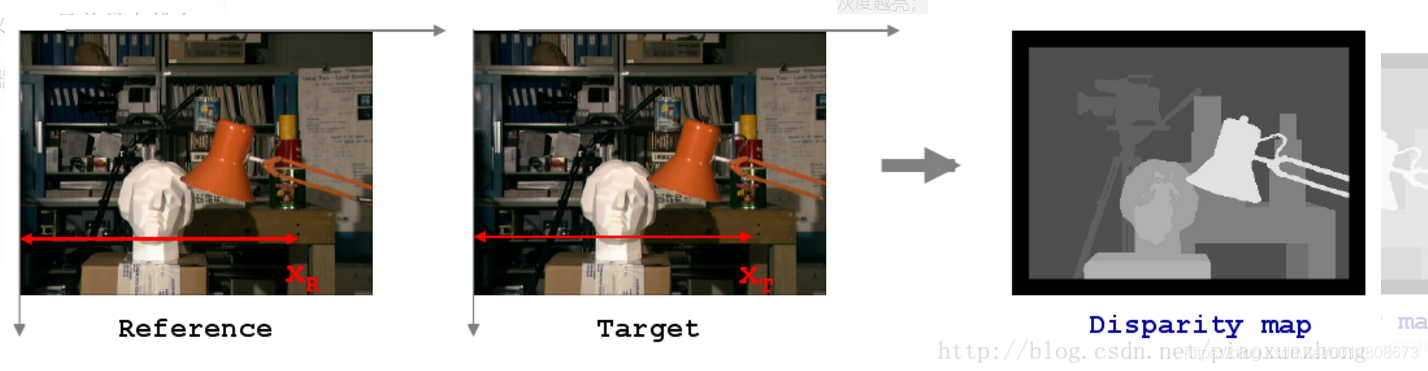
视差是同一个空间点在两个相机成像中对应的x坐标的差值,它可以通过编码成灰度图来反映出距离的远近,离镜头越近的灰度越亮; (前提是两个摄像头是水平,如果两颗摄像头是垂直的,则使用y坐标的差值)
双目测距的优点与难点
双目系统优势:
(1)与激光雷达等方案相比成本较低;
(2)依靠自然光,室内室外都可使用
(3)直接利用视差计算距离,精度比单目高;
双目系统的难点:
(1)计算量非常大,对计算单元的性能要求非常高,这使得双目系统的产品化、小型化的难度较大。所以在芯片或FPGA上解决双目的计算问题难度比较大。国际上使用双目的研究机构或厂商,绝大多数是使用服务器进行图像处理与计算,也有部分将算法进行简化后,使用FPGA进行处理。
(2)双目的配准效果,直接影响到测距的准确性。
2.1、对环境光照非常敏感。双目立体视觉法依赖环境中的自然光线采集图像,而由于光照角度变化、光照强度变化等环境因素的影响,拍摄的两张图片亮度差别会比较大,这会对匹配算法提出很大的挑战

2.2、不适用于单调缺乏纹理的场景。由于双目立体视觉法根据视觉特征进行图像匹配,所以对于缺乏视觉特征的场景(如天空、白墙、沙漠等)会出现匹配困难,导致匹配误差较大甚至匹配失败。

3、RGB-D相机
RGB-D什么意思
RGB-D深度图像介绍RGBD_donkey_1993的博客-CSDN博客

RGBD = RGB + Depth Map
RGB :
RGB色彩模式是工业界的一种颜色标准,是通过对红(R)、绿(G)、蓝(B)三个颜色通道的变化以及它们相互之间的叠加来得到各式各样的颜色的,RGB即是代表红、绿、蓝三个通道的颜色,这个标准几乎包括了人类视力所能感知的所有颜色,是目前运用最广的颜色系统之一。
Depth Map:
在3D计算机图形中,Depth Map(深度图)是包含与视点的场景对象的表面的距离有关的信息的图像或图像通道。其中,Depth Map 类似于灰度图像,只是它的每个像素值是传感器距离物体的实际距离。通常RGB图像和Depth图像是配准的,因而像素点之间具有一对一的对应关系。
RGB-D相机的分类
RGBD相机的介绍和使用_骑驴去学习的博客-CSDN博客
分成两类:
一类是结构光法,比如Kinect v1、Iphone X;
结构光法是为了解决双目匹配问题产生的,解决对环境光照敏感问题,是红外光,晚上也可以用,不依赖光照和纹理。
其中Kinect v1是最早的结构光法,是以色列的PrimeSense公司,后来被苹果收购了,用于Iphone X,人脸解锁非常稳定。在空间上的分辨率是3mm,深度上的分辨率是1cm。(2m距离)
一类是飞行时间(ToF)法,比如Kinect v2、Phab 2 Pro。
飞行时间法就是发射一束光脉冲(一般为不可见光),然后经过物体反射回去,再接收到光脉冲。通过探测飞行的这段时间来计算被测物体离相机的距离。
TOF的测量精度不会随着测量距离的增大而降低,而且抗干扰能力比较强,适合测量距离要求比较远的场合,比如无人驾驶、AR等等。但是他的功耗比较大,分辨率较低、深度图的质量较差
RGBD相机的缺点:
RGBD相机的介绍和使用_骑驴去学习的博客-CSDN博客
(1)不适合室外使用
(2)受到深黑色物体、半透明物体、镜面反射物体、视差的影响
(3)功耗大
(4)分辨率比较低
(5)深度图质量和硬件关系密切
(6)成本较高,比双目相机贵
深黑色物体可以吸收大量的红外光所以会导致测量不准,这就使接收到的红外光很少。

表面光滑物体的影响:漫反射是多个角度清晰成像的基础

透明物体的影响:半透明物体会经过两次反射,如果是透明物体,就会直接穿过了,导致深度测量不准。
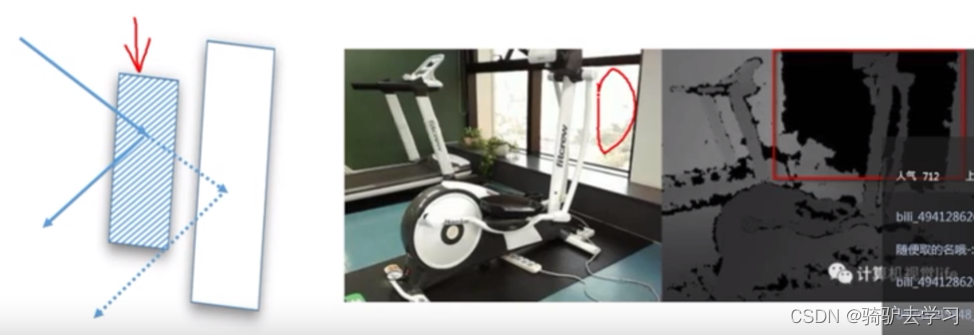
视差的影响:结构光深度相机的红外发射端和接收端有一定的距离,因此在物体的边缘有明显视差。
RGBD相机的优点
RGBD相机的介绍和使用_骑驴去学习的博客-CSDN博客

三、点云有哪些研究方向
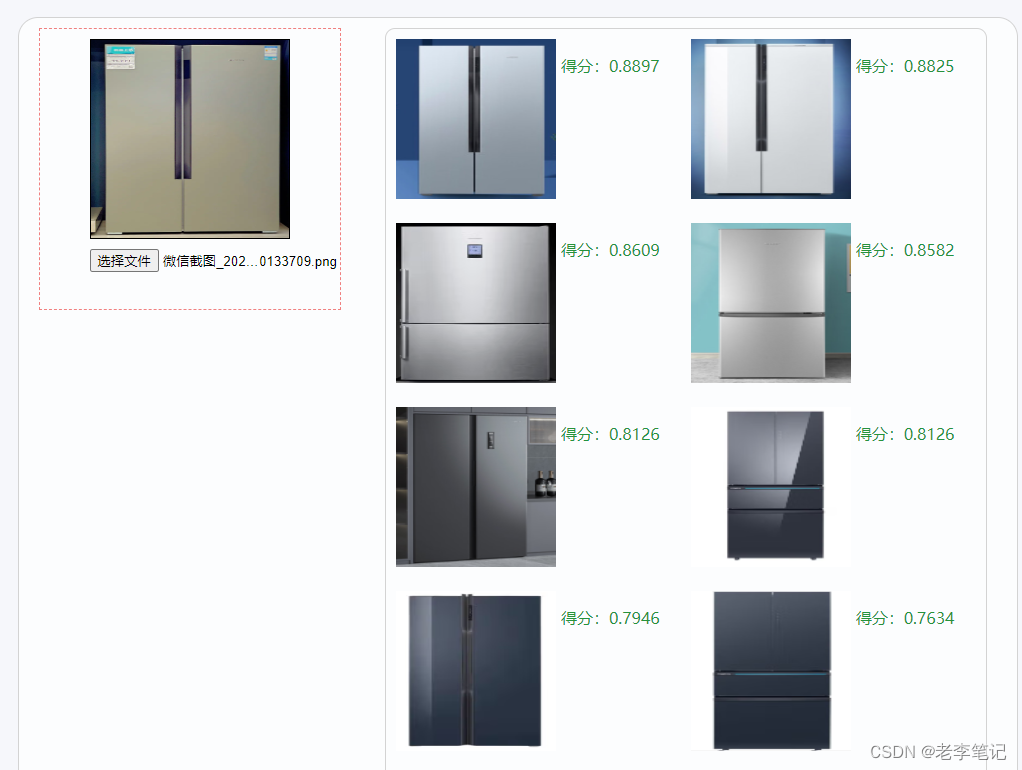
1、基于点云的分类
3D点云基础知识 - 知乎

- 对点云的分类通常称为三维形状分类。与图像分类模型相似,三维形状分类模型通常是先通过聚合编码器生成全局嵌入,然后将嵌入通过几个完全连通的层来获得最终结果。
- 基于点云聚合方法,分类模型大致可分为两类:基于投影的方法和基于点的方法
2、基于点云的分割
3D点云深度学习-浅谈点云分割_点云分割深度学习_七小琦的博客-CSDN博客
3D分割的目的是对每个点进行标记,这需要模型在每个点上收集全局上下文和详细的局部信息。在三维图像分割中,主要有两个任务:语义分割和实例分割。
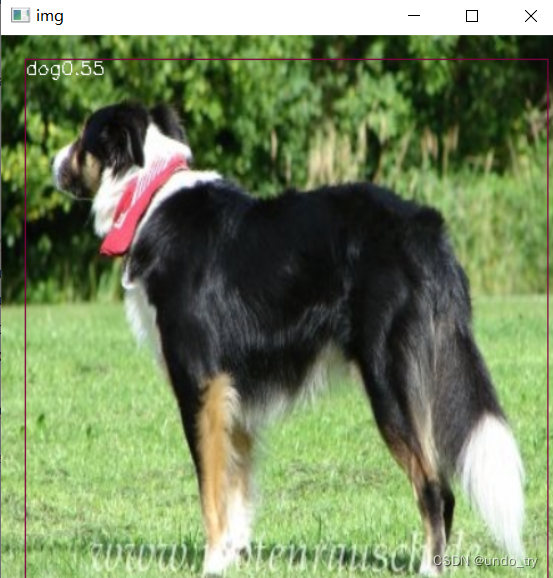
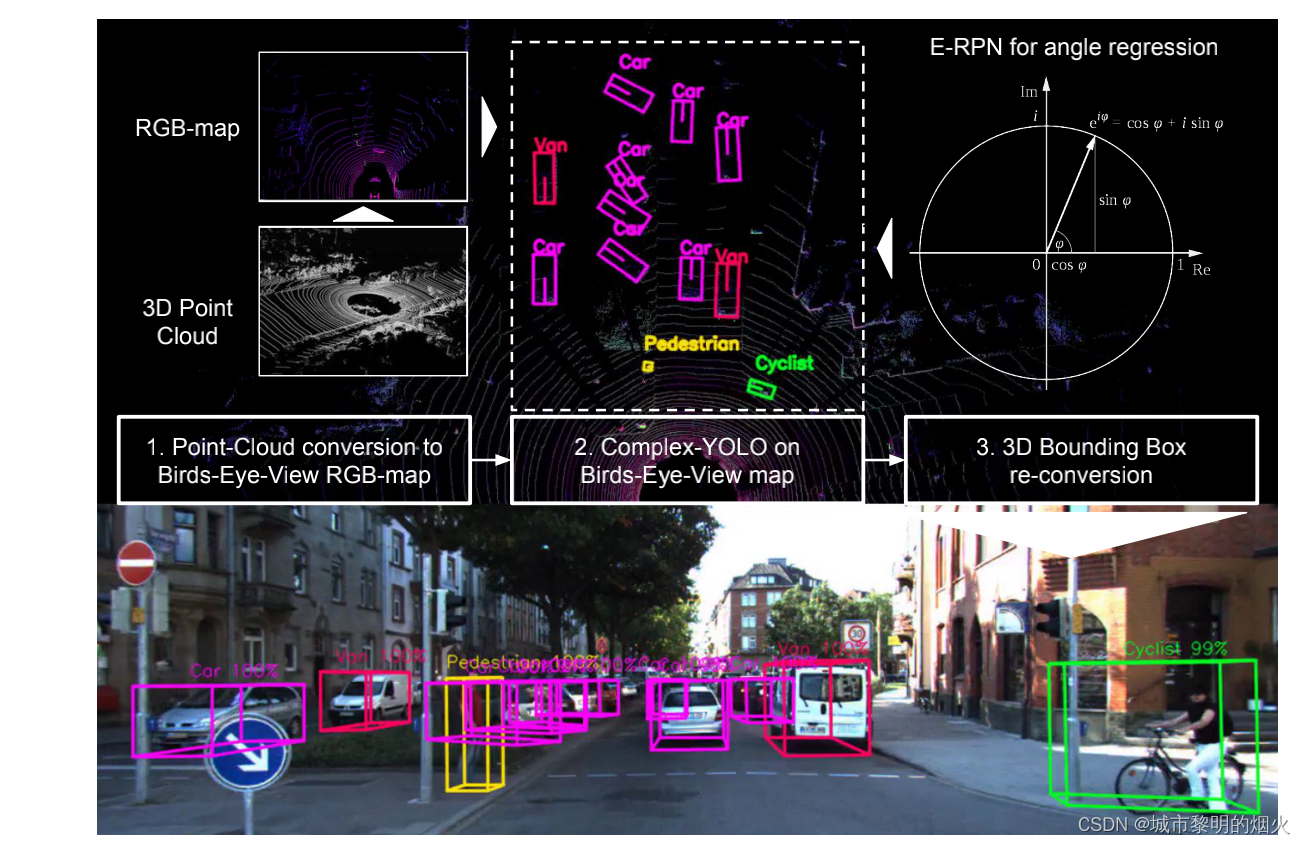
3、基于点云的目标检测
【Complex-YOLO: 点云实时目标检测】_yolo 点云_城市黎明的烟火的博客-CSDN博客
4、点云数据的增强和完整化
3D点云基础知识 - 知乎
由激光雷达收集的点云,特别是那些来自室外场景的点云,遭受不同种类的质量问题,如噪音,异常值,和遗漏点。所以我们的目标是补全缺失的点,移除掉异常的点
5、无人驾驶
声明:
本文系 块引用文章 的内容整理,如有侵权立删!