ArduPilot之H743遗留配置问题解决
- 1. 源由
- 2. 资源
- 3 遗留问题汇总
- 3.1 问题一:无法设置VTX 600m
- 3.2 问题二:双向Dshot未显示RMP转速
- 3.3 问题三:mavlink esp32 2.4G WiFi电传
- 4. 参考资料
1. 源由
在ArduPilot开源代码之H743+BMI270x2+ChibiOS配置适配中遗留了三个问题:
【1】【存疑】VTX在TX12遥控器无法设置0mW,100mW,200mW,400mW, 600mW分段控制(主要是600mW无法设置)
【2】【存疑】双向Dshot似乎并未正常工作,RPM转速未在MP上看到
【3】【待移植/配置】mavlink esp32尚未启用
2. 资源
先给出大家最关心的资源,所有东西大家可以下载查看:
注:实际情况因硬件差异,请调整。仅供参考!
- AP_VideoTX.patch //修改4.3.7代码的差异
- H743_BMI270x2_v30_HW_CONFIG //硬件配置文件
- H743_bin //基于4.3.7copter编译二进制
- H7Dual.param //本机导出参数配置文件
资源文件:H743-Copter-4.3.7.zip
H743_Copter_4.3.7/
|-- AP_VideoTX.patch
|-- H743_BMI270x2_v30_HW_CONFIG
| |-- defaults.parm
| |-- hwdef-bl.dat
| `-- hwdef.dat
|-- H743_bin
| |-- Linker.map
| |-- Makefile
| |-- ap_config.h
| |-- ap_romfs_embedded.h
| |-- ap_version.h
| |-- bin
| | |-- AP_Bootloader.apj
| | |-- AP_Bootloader.bin
| | |-- AP_Bootloader.hex
| | |-- arducopter
| | |-- arducopter.apj
| | |-- arducopter.bin
| | |-- arducopter.hex
| | `-- arducopter_with_bl.hex
| |-- common.ld
| |-- compile_commands.json
| |-- env.py
| |-- gen-bindings
| |-- hw.dat
| |-- hwdef.h
| `-- ldscript.ld
`-- H7Dual.param
3 遗留问题汇总
针对每个问题的情况进行统一汇总整理,希望对大家有所帮助。
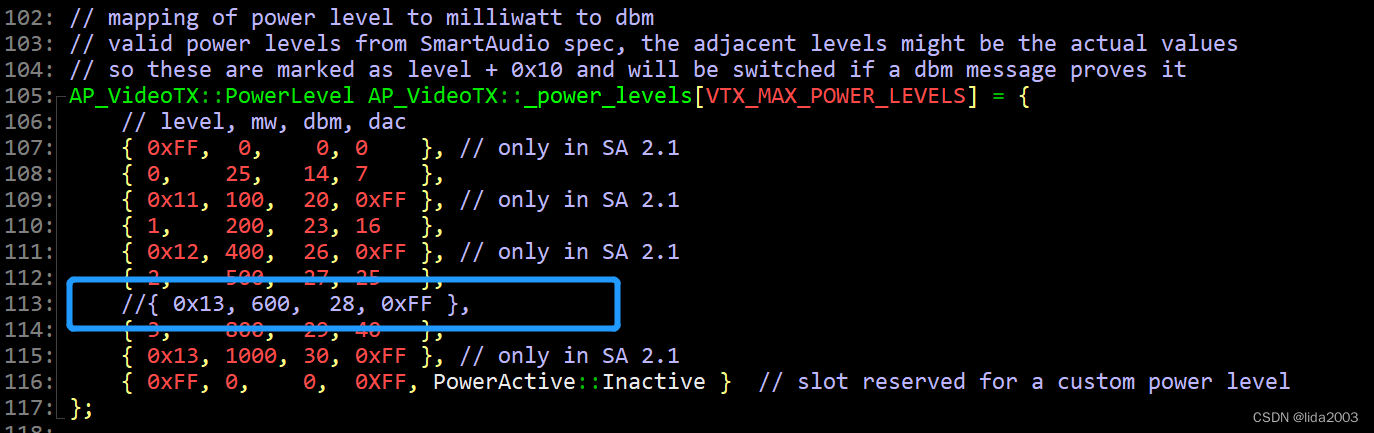
3.1 问题一:无法设置VTX 600m
其主要问题是600mW代码被注释掉了,不管如何调都不可能出现。因此需要修改代码,具体详见:AP_VideoTX.patch
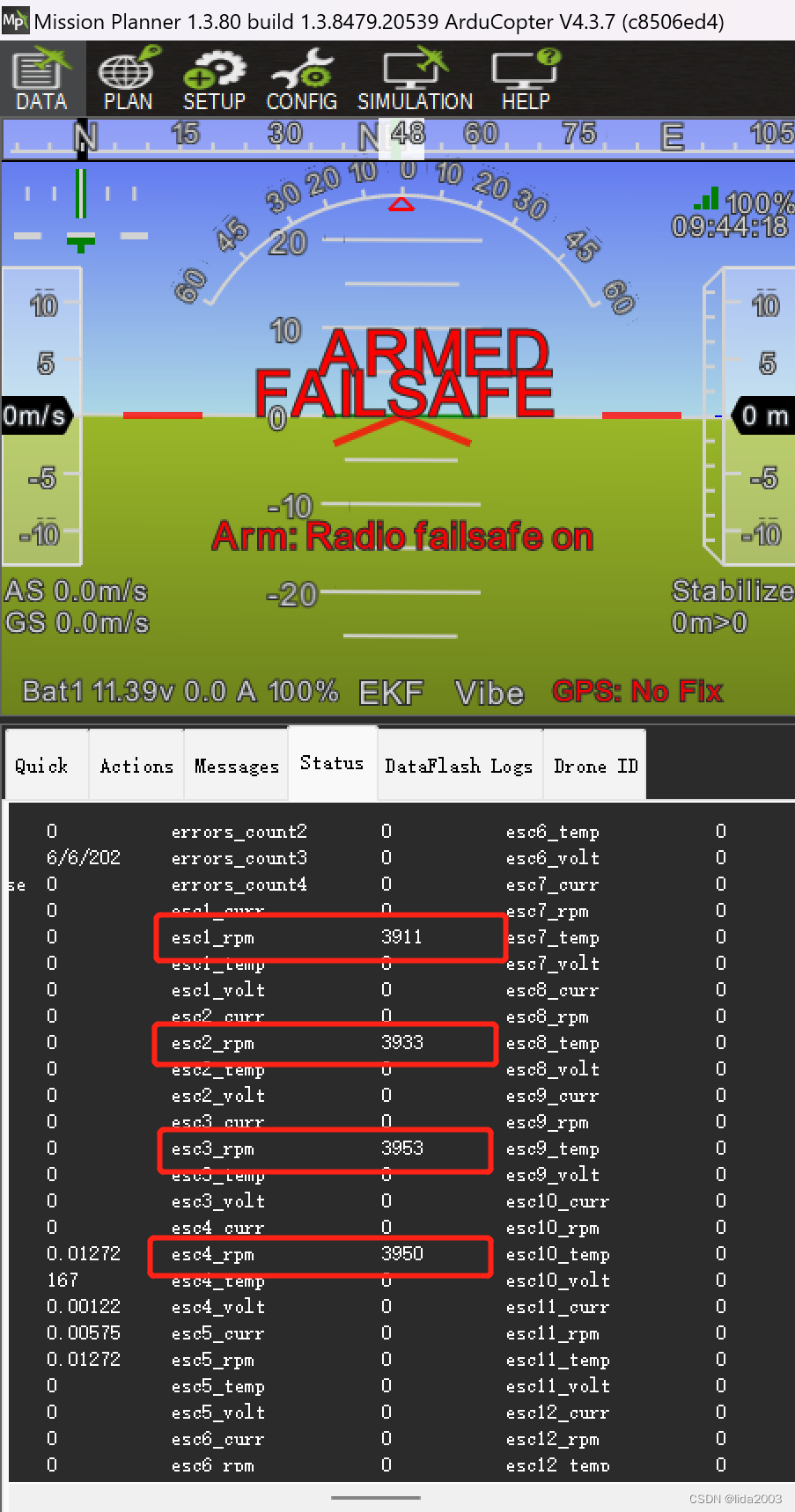
3.2 问题二:双向Dshot未显示RMP转速
该问题主要是因为ArduPilot之MissionPlanner姿态显示界面异常导致。所以请进行配置前,确保配置工具的正常使用。
本次配置后,转速显示如下:
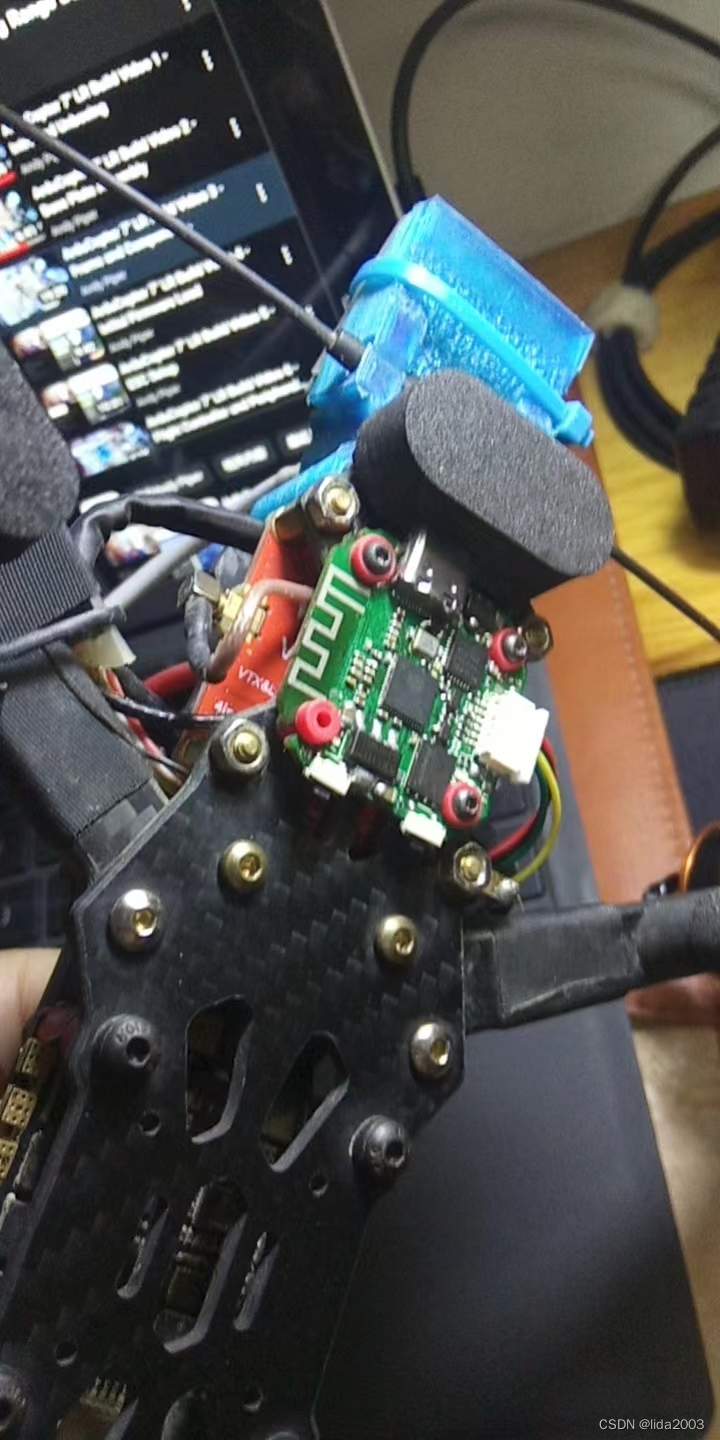
3.3 问题三:mavlink esp32 2.4G WiFi电传
硬件来自:SnapDragonfly-SnapAirUnit
SnapAirUnit Hardware V1.0 (experimental)
固件采用:DroneBridge/ESP32
安装方式如下:
4. 参考资料
【1】ArduPilot开源代码之H743+BMI270x2+ChibiOS配置适配
【2】ArduPilot之MissionPlanner姿态显示界面异常