引言
本文简单地介绍一些凸优化(Convex Optimization)的基础知识,可能不会有很多证明推导,目的是能快速应用到机器学习问题上。
凸集
直线与线段
设
x
1
≠
x
2
x_1 \neq x_2
x1=x2为
R
n
\Bbb R^n
Rn空间中的两个点,那么具有下列形式的点
y
=
θ
x
1
+
(
1
−
θ
)
x
2
,
θ
∈
R
y= \theta x_1 + (1-\theta)x_2,\, \theta \in \Bbb R
y=θx1+(1−θ)x2,θ∈R
组成一条穿越
x
1
x_1
x1和
x
2
x_2
x2的直线。
如果参数 θ \theta θ的值在 0 0 0到 1 1 1之间变动,就构成了 x 1 x_1 x1和 x 2 x_2 x2之间的线段。
仿射集合
如果通过集合 C ⊆ R n C \subseteq \Bbb R^n C⊆Rn中任意两个不同点的直线仍然在集合 C C C中,那么称集合 C C C是仿射的。
可以扩展到多个点的情况,如果 θ 1 + ⋯ + θ k = 1 \theta_1+ \cdots + \theta_k=1 θ1+⋯+θk=1,我们称具有 θ 1 x 1 + ⋯ + θ k x k \theta_1 x_1 + \cdots + \theta_k x_k θ1x1+⋯+θkxk形式的点为 x 1 , ⋯ , x k x_1,\cdots, x_k x1,⋯,xk的仿射组合。
凸集
首先来了解下什么是凸集(Convex Set)。
集合
C
C
C被称为凸集,如果
C
C
C中任意两点间的线段仍然在
C
C
C中,即对于任意
x
1
,
x
2
∈
C
x_1,x_2 \in C
x1,x2∈C和满足
0
≤
θ
≤
1
0\leq \theta \leq 1
0≤θ≤1的
θ
\theta
θ都有
θ
x
1
+
(
1
−
θ
)
x
2
∈
C
(1)
\theta x_1 + (1-\theta)x_2 \in C \tag{1}
θx1+(1−θ)x2∈C(1)
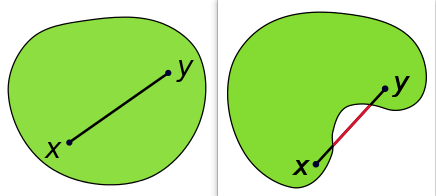
直观上来看,凸集的形状是饱满的,即没有凹进去的地方。
我们称
θ
x
1
+
(
1
−
θ
)
x
2
(2)
\theta x_1 + (1-\theta)x_2 \tag{2}
θx1+(1−θ)x2(2)
为点
x
1
,
x
2
x_1,x_2
x1,x2的凸组合,类似地,可以推广到多个点:
θ
1
x
1
+
⋯
+
θ
k
x
k
(3)
\theta_1 x_1 + \cdots + \theta_kx_k \tag{3}
θ1x1+⋯+θkxk(3)
为点
x
1
,
⋯
,
x
k
x_1,\cdots,x_k
x1,⋯,xk的一个凸组合,其中
θ
1
+
⋯
+
θ
k
=
1
\theta_1 + \cdots + \theta_k=1
θ1+⋯+θk=1且
θ
i
≥
0
,
i
=
1
,
⋯
,
k
\theta_i \geq 0, \, i=1,\cdots,k
θi≥0,i=1,⋯,k。
一个集合是凸集也可以说集合包含其中所有点的凸组合。
我们称集合 C C C中所有点的凸组合的集合为其凸包,记作 conv C \text{conv} \,C convC。
多个凸集的交集也是凸集,这意味着如果每个不等式或等式约束条件定义的集合都是凸集,那么这些条件联合起来定义的集合仍然是凸集。
基于凸集的概念可以定义凸函数。
凸函数
函数
f
:
R
n
→
R
f : \Bbb R^n \rightarrow \Bbb R
f:Rn→R是凸的,如果函数的定义域(
dom
f
\text{dom}\, f
domf)是凸集,且对于任意
x
1
,
x
2
∈
dom
f
x_1,x_2 \in \text{dom}\, f
x1,x2∈domf和任意的
0
≤
θ
≤
1
0 \leq \theta \leq 1
0≤θ≤1,有
f
(
θ
x
1
+
(
1
−
θ
)
x
2
)
≤
θ
f
(
x
1
)
+
(
1
−
θ
)
f
(
x
2
)
(4)
f(\theta x_1 + (1-\theta)x_2) \leq \theta f(x_1) + (1-\theta) f(x_2) \tag{4}
f(θx1+(1−θ)x2)≤θf(x1)+(1−θ)f(x2)(4)
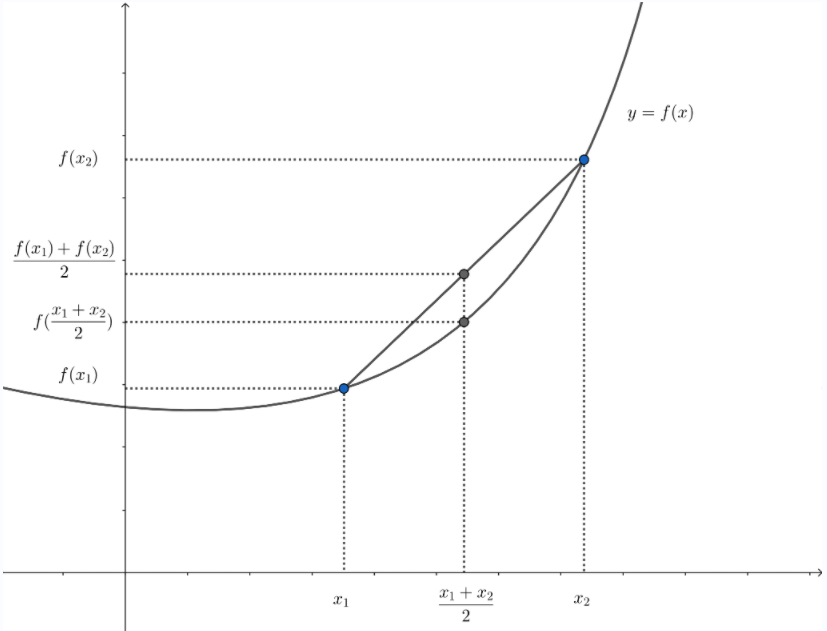
如图2(取 θ = 1 2 \theta=\frac{1}{2} θ=21),从几何意义上看,式 ( 4 ) (4) (4)的不等式成立意味着点 ( x 1 , f ( x 1 ) ) (x_1,f(x_1)) (x1,f(x1))和 ( x 2 , f ( x 2 ) ) (x_2,f(x_2)) (x2,f(x2))之间的线段,即从 x 1 x_1 x1到 x 2 x_2 x2的弦,在函数 f f f的图像上方。
反之,如果式 ( 4 ) (4) (4)中的函数为 ≥ \geq ≥,则称为凹函数。如果 f f f是凸函数,那么 − f -f −f就是凹函数。注意,还有很多函数是非凸也非凹的。
凸函数的一个很好的性质是,它只有一个局部极小值点,同时也是全局最小值点。
凸优化问题
优化问题
我们用
minimize
f
0
(
x
)
s.t.
f
i
(
x
)
≤
0
,
i
=
1
,
…
,
m
h
i
(
x
)
=
0
,
i
=
1
,
…
,
p
(5)
\begin{aligned} &\text{minimize}\quad &&f_0(x)\\ &\text{s.t.}\quad &&f_i(x) \leq 0,\quad i=1,\dots,m\\ &&&h_i(x) = 0,\quad i=1,\dots,p \end{aligned} \tag{5}
minimizes.t.f0(x)fi(x)≤0,i=1,…,mhi(x)=0,i=1,…,p(5)
描述在所有满足
f
i
(
x
)
≤
0
,
i
=
1
,
⋯
,
m
f_i(x) \leq 0,\, i=1,\cdots,m
fi(x)≤0,i=1,⋯,m及
h
i
(
x
)
=
0
,
i
=
1
,
⋯
,
p
h_i(x)=0,\,i=1,\cdots,p
hi(x)=0,i=1,⋯,p的
x
x
x中寻找极小化
f
0
(
x
)
f_0(x)
f0(x)的
x
x
x的问题,即优化问题。
-
x ∈ R n x \in \Bbb R^n x∈Rn为优化变量;
-
函数 f 0 : R n → R f_0 : \Bbb R^n \rightarrow \Bbb R f0:Rn→R为目标函数;
-
不等式 f i ( x ) ≤ 0 f_i(x) \leq 0 fi(x)≤0称为不等式约束,相应的函数 f i : R n → R f_i: \Bbb R^n \rightarrow \Bbb R fi:Rn→R称为不等式约束函数;
-
方程组 h i ( x ) = 0 h_i(x) =0 hi(x)=0称为等式约束,相应的函数 h i : R n → R h_i: \Bbb R^n \rightarrow \Bbb R hi:Rn→R称为等式约束函数。
如果没有约束,即 m = p = 0 m=p=0 m=p=0,我们称问题 ( 5 ) (5) (5)为无约束问题。
对目标和所有约束函数有定义的点的集合
D
=
⋂
i
=
0
m
dom
f
i
∩
⋂
i
=
1
p
dom
h
i
\mathcal D = \bigcap_{i=0}^m \text{dom}\, f_i \cap \bigcap_{i=1}^p \text{dom}\, h_i
D=i=0⋂mdomfi∩i=1⋂pdomhi
称为优化问题
(
5
)
(5)
(5)的定义域。当点
x
∈
D
x \in \cal D
x∈D满足约束
f
i
(
x
)
≤
0
,
i
=
1
,
⋯
,
m
f_i(x) \leq 0,\, i=1,\cdots,m
fi(x)≤0,i=1,⋯,m和
h
i
(
x
)
=
0
,
i
=
1
,
⋯
,
p
h_i(x)=0,\, i=1,\cdots, p
hi(x)=0,i=1,⋯,p时,
x
x
x是可行的。当问题
(
5
)
(5)
(5)至少有一个可行点时,我们称为可行的,否则称为不可行。所有可行点的集合称为可行集或约束集。
如果 x ∗ x^* x∗是可行的并且 f 0 ( x ∗ ) = p ∗ f_0(x^*)=p^* f0(x∗)=p∗最优值,我们称 x ∗ x^* x∗为最优点。如果问题存在最优解,我们称最优质是课的或可达的,称问题可解。
如果 x x x可行且 f i ( x ) = 0 f_i(x)=0 fi(x)=0,我们称约束 f i ( x ) ≤ 0 f_i(x)\leq 0 fi(x)≤0的第 i i i个不等式在 x x x处起作用。如果 f i ( x ) < 0 f_i(x) < 0 fi(x)<0,则约束 f i ( x ) ≤ 0 f_i(x) \leq 0 fi(x)≤0不起作用。我们称约束是冗余的,如果去掉它不改变可行集。
凸优化
凸优化问题是形如
minimize
f
0
(
x
)
s.t.
f
i
(
x
)
≤
0
,
i
=
1
,
…
,
m
a
i
T
x
=
b
i
,
i
=
1
,
⋯
,
p
(6)
\begin{aligned} &\text{minimize}\quad &&f_0(x)\\ &\text{s.t.}\quad &&f_i(x) \leq 0,\quad i=1,\dots,m\\ &&&a_i^Tx = b_i,\quad\, i=1,\cdots,p \end{aligned} \tag{6}
minimizes.t.f0(x)fi(x)≤0,i=1,…,maiTx=bi,i=1,⋯,p(6)
的问题,其中
f
0
,
⋯
,
f
m
f_0,\cdots,f_m
f0,⋯,fm为凸函数,对比优化问题
(
5
)
(5)
(5),凸优化问题有三个附加的要求:
- 目标函数必须是凸的;
- 不等式约束函数必须是凸的;
- 等式约束函数 h i ( x ) = a i T − b i h_i(x) = a^T_i - b_i hi(x)=aiT−bi必须是仿射的;
立即可以看到一个重要的性质:凸优化问题的可行集是凸的。
带约束的优化问题
拉格朗日乘子法
拉格朗日乘子法(Lagrange Multiplier Method)用于求解带等式约束条件的函数极值(优化问题)。假设有如下极值问题
minimize
f
(
x
)
s.t.
h
i
(
x
)
=
0
,
i
=
1
,
…
,
p
(7)
\begin{aligned} &\text{minimize}\quad &&f(x)\\ &\text{s.t.}\quad &&h_i(x) = 0,\quad i=1,\dots,p\\ \end{aligned} \tag{7}
minimizes.t.f(x)hi(x)=0,i=1,…,p(7)
拉格朗日乘子法构造如下拉格朗日乘子函数
L
(
x
,
λ
)
=
f
(
x
)
+
∑
i
=
1
p
λ
i
h
i
(
x
)
(8)
L(x,\lambda) = f(x) + \sum_{i=1}^p \lambda_i h_i(x) \tag{8}
L(x,λ)=f(x)+i=1∑pλihi(x)(8)
其中
λ
\lambda
λ为新引入的自变量,称为拉格朗日乘子((Lagrange Multiplier)。构造了该函数之后,去掉了对优化变量的等式约束。对拉格朗日乘子函数的所有自变量求偏导,并令其为
0
0
0。包括对
x
x
x求导、对
λ
\lambda
λ求导。得到下面的方程组:
∇
x
f
(
x
)
+
∑
i
=
1
p
λ
i
∇
x
h
i
(
x
)
=
0
h
i
(
x
)
=
0
(9)
\begin{aligned} \nabla_x f(x) + \sum_{i=1}^p \lambda_i \nabla_x h_i(x) &= 0 \\ h_i(x) &= 0 \end{aligned} \tag{9}
∇xf(x)+i=1∑pλi∇xhi(x)hi(x)=0=0(9)
求解该方程组即可得到函数的候选极值点。
拉格朗日对偶
对偶是求解最优化问题的一种手段,它将一个最优化问题转换为另一个更容易求解的问题,这两个问题是等价的。
对于如下带等式约束和不等式约束的优化问题:
minimize
f
(
x
)
s.t.
g
i
(
x
)
≤
0
,
i
=
1
,
…
,
m
h
i
(
x
)
=
0
,
i
=
1
,
…
,
p
(10)
\begin{aligned} &\text{minimize}\quad &&f(x)\\ &\text{s.t.}\quad &&g_i(x) \leq 0,\quad i=1,\dots,m\\ &&&h_i(x) = 0,\quad i=1,\dots,p \end{aligned} \tag{10}
minimizes.t.f(x)gi(x)≤0,i=1,…,mhi(x)=0,i=1,…,p(10)
仿照拉格朗日乘子法构造广义拉格朗日乘子函数
L
(
x
,
λ
,
μ
)
=
f
(
x
)
+
∑
i
=
1
m
λ
i
g
i
(
x
)
+
∑
i
=
1
p
μ
i
h
i
(
x
)
(11)
L(x,\lambda,\mu ) = f(x) + \sum_{i=1}^m \lambda_i g_i(x) + \sum_{i=1}^p \mu_i h_i(x) \tag{11}
L(x,λ,μ)=f(x)+i=1∑mλigi(x)+i=1∑pμihi(x)(11)
称
λ
\lambda
λ和
μ
\mu
μ为拉格朗日乘子,特别要求
λ
i
≥
0
\lambda_i \geq 0
λi≥0。接下来将上面的问题转化为所谓的原问题,其最优化解为
p
∗
p^*
p∗。
p
∗
=
min
x
max
λ
,
μ
,
λ
i
≥
0
L
(
x
,
λ
,
μ
)
=
min
x
θ
P
(
x
)
(12)
p^* = \min_x \, \max_{\lambda,\mu,\lambda_i \geq 0} L(x,\lambda, \mu) = \min_x \theta_P(x) \tag{12}
p∗=xminλ,μ,λi≥0maxL(x,λ,μ)=xminθP(x)(12)
上式第一个等号右边的含义是先固定变量
x
x
x,将其看成常数,让拉格朗日函数对乘子变量
λ
\lambda
λ和
μ
\mu
μ求极大值;消掉(确定了)变量
λ
\lambda
λ和
μ
\mu
μ之后,再对变量
x
x
x求极小值。
为了简化表述,定义如下极大值问题
θ
P
(
x
)
=
max
λ
,
μ
,
λ
i
≥
0
L
(
x
,
λ
,
μ
)
(13)
\theta_P(x) =\max_{\lambda,\mu,\lambda_i \geq 0} L(x,\lambda, \mu) \tag{13}
θP(x)=λ,μ,λi≥0maxL(x,λ,μ)(13)
这是一个对变量
λ
\lambda
λ和
μ
\mu
μ求函数
L
L
L的极大值的问题,将
x
x
x看成常数。这样,原始问题被转化为先对变量
λ
\lambda
λ和
μ
\mu
μ求极大值,再对
x
x
x求极小值。
这个原问题和我们要求解的原始问题有同样的解,下面给出证明。对于任意的 x x x,分两种情况讨论。
(1)如果 x x x是不可行解,对于某些 i i i有 g i ( x ) > 0 g_i(x) > 0 gi(x)>0,即 x x x违反了不等式约束条件,我们让拉格朗日乘子 λ i = + ∞ \lambda_i = +\infty λi=+∞,最终使得目标函数 θ P ( x ) = + ∞ \theta_P(x) = +\infty θP(x)=+∞。如果对于某些 i i i有 h i ( x ) ≠ 0 h_i(x) \neq 0 hi(x)=0,即违反了等式约束,我们可以让 μ i = + ∞ ⋅ sgn ( h i ( x ) ) \mu_i = +\infty \cdot \text{sgn}(h_i(x)) μi=+∞⋅sgn(hi(x)),从而使得 θ P ( x ) = + ∞ \theta_P(x) = +\infty θP(x)=+∞。
即对于任意不满足等式或不等式约束条件的 x x x, θ P ( x ) \theta_P(x) θP(x)的值是 + ∞ +\infty +∞。
(2)如果 x x x是可行解,这时 θ P ( x ) = f ( x ) \theta_P(x) = f(x) θP(x)=f(x)。因为有 h i ( x ) = 0 h_i(x) =0 hi(x)=0且 g i ( x ) ≤ 0 g_i(x) \leq 0 gi(x)≤0,而我们要求 λ i ≥ 0 \lambda_i \geq 0 λi≥0,因为 θ P ( x ) \theta_P(x) θP(x)的极大值就是 f ( x ) f(x) f(x)。为了达到这个极大值,我们让 λ i \lambda_i λi和 μ i \mu_i μi为 0 0 0,函数 f ( x ) + ∑ i = 1 p μ i h i ( x ) f(x) + \sum_{i=1}^p \mu_i h_i(x) f(x)+∑i=1pμihi(x)的极大值就是 f ( x ) f(x) f(x)。
综上两种情况,问题
θ
P
(
x
)
\theta_P(x)
θP(x)和我们要优化的原始问题的关系可以表述为
θ
P
(
x
)
=
{
f
(
x
)
g
i
(
x
)
≤
0
,
h
i
(
x
)
=
0
+
∞
else
\theta_P(x) = \begin{cases} f(x) & g_i(x) \leq 0, h_i(x) = 0\\ +\infty & \text{else} \end{cases}
θP(x)={f(x)+∞gi(x)≤0,hi(x)=0else
即
θ
P
(
x
)
\theta_P(x)
θP(x)是原始优化问题的无约束版本。对于任何不可行的
x
x
x,有
θ
P
(
x
)
=
+
∞
\theta_P(x) = +\infty
θP(x)=+∞,从而使得原始问题的目标函数趋向于无穷大,排除掉
x
x
x的不可行区域,只剩下可行的
x
x
x组成的区域。
这样我们要求解的带约束优化问题被转化成了对 x x x不带约束的优化问题,并且二者等价。
下面定义对偶问题与其最优解
d
∗
d^*
d∗。
d
∗
=
max
λ
,
μ
,
λ
i
≥
0
min
x
L
(
x
,
λ
,
μ
)
=
max
λ
,
μ
,
λ
i
≥
0
θ
D
(
λ
,
μ
)
(14)
d^* = \max_{\lambda,\mu,\lambda_i \geq 0}\, \min_x L(x,\lambda, \mu) = \max_{\lambda,\mu,\lambda_i \geq 0} \theta_D(\lambda, \mu) \tag{14}
d∗=λ,μ,λi≥0maxxminL(x,λ,μ)=λ,μ,λi≥0maxθD(λ,μ)(14)
这里先固定拉格朗日乘子
λ
\lambda
λ和
μ
\mu
μ,调整
x
x
x让拉格朗日函数对
x
x
x求极小值;然后调整
λ
\lambda
λ和
μ
\mu
μ对函数求极大值。
原问题和对偶问题只是改变了求极大值和极小值的顺序,每次操控的变量是一样的。如果原问题和对偶问题都存在最优解,则对偶问题的最优值不大于原问题的最优值,即
d
∗
=
max
λ
,
μ
,
λ
i
≥
0
min
x
L
(
x
,
λ
,
μ
)
≤
min
x
max
λ
,
μ
,
λ
i
≥
0
L
(
x
,
λ
,
μ
)
=
p
∗
(15)
d^* =\max_{\lambda,\mu,\lambda_i \geq 0}\, \min_x L(x,\lambda, \mu) \leq \min_x \, \max_{\lambda,\mu,\lambda_i \geq 0} L(x,\lambda, \mu) = p^* \tag{15}
d∗=λ,μ,λi≥0maxxminL(x,λ,μ)≤xminλ,μ,λi≥0maxL(x,λ,μ)=p∗(15)
证明,假设原问题的最优解为
x
1
,
λ
1
,
μ
1
x_1,\lambda_1,\mu_1
x1,λ1,μ1,对偶问题的最优解为
x
2
,
λ
2
,
μ
2
x_2,\lambda_2,\mu_2
x2,λ2,μ2,由于原问题是先对
(
λ
,
μ
)
(\lambda,\mu)
(λ,μ)取极大值,有
L
(
x
1
,
λ
1
,
μ
1
)
≥
L
(
x
1
,
λ
2
,
μ
2
)
L(x_1,\lambda_1,\mu_1) \geq L(x_1,\lambda_2,\mu_2)
L(x1,λ1,μ1)≥L(x1,λ2,μ2)
这里固定
x
1
x_1
x1。
而对偶问题先对
x
x
x取极小值,有
L
(
x
2
,
λ
2
,
μ
2
)
≤
L
(
x
1
,
λ
2
,
μ
2
)
L(x_2,\lambda_2,\mu_2) \leq L(x_1,\lambda_2,\mu_2)
L(x2,λ2,μ2)≤L(x1,λ2,μ2)
这类变化的只是
x
x
x。上面两个式子中右边都是一样的,从而有
L
(
x
1
,
λ
1
,
μ
1
)
≥
L
(
x
2
,
λ
2
,
μ
2
)
L(x_1,\lambda_1,\mu_1) \geq L(x_2,\lambda_2,\mu_2)
L(x1,λ1,μ1)≥L(x2,λ2,μ2)
这一结论称为弱对偶定理(Weak Duality)。
原问题最优值和对偶问题最优值的差 p ∗ − d ∗ p^*-d^* p∗−d∗称为对偶间隙。如果原问题和对偶问题有相同的最优解,那么我们就可以把求解原问题转化为求解对偶问题,此时对偶间隙为0,这种情况称为强对偶。
但要满足怎样的条件才能使得 d ∗ = p ∗ d^*=p^* d∗=p∗呢,就是下面阐述的KKT条件。
KKT条件
KKT(Karush-Kuhn-Tucker)条件用于求解带有等式和不等式约束的优化问题,是拉格朗日乘子法的推广。
对于如下带等式约束和不等式约束的优化问题:
minimize
f
(
x
)
s.t.
g
i
(
x
)
≤
0
,
i
=
1
,
…
,
m
h
i
(
x
)
=
0
,
i
=
1
,
…
,
n
(16)
\begin{aligned} &\text{minimize}\quad &&f(x)\\ &\text{s.t.}\quad &&g_i(x) \leq 0,\quad i=1,\dots,m\\ &&&h_i(x) = 0,\quad i=1,\dots,n \end{aligned} \tag{16}
minimizes.t.f(x)gi(x)≤0,i=1,…,mhi(x)=0,i=1,…,n(16)
与拉格朗日对偶的做法类似,为其构造拉格朗日乘子函数消掉等式和不等式约束:
L
(
x
,
λ
,
μ
)
=
f
(
x
)
+
∑
i
=
1
m
μ
i
g
i
(
x
)
+
∑
i
=
1
n
λ
i
h
i
(
x
)
(17)
L(x,\lambda,\mu ) = f(x) + \sum_{i=1}^m \mu_i g_i(x) + \sum_{i=1}^n \lambda_i h_i(x) \tag{17}
L(x,λ,μ)=f(x)+i=1∑mμigi(x)+i=1∑nλihi(x)(17)
λ
\lambda
λ和
μ
\mu
μ称为KKT乘子。
KKT条件包括:
- ∇ x L ( x , λ , μ ) = 0 \nabla_x L(x,\lambda,\mu) = \pmb 0 ∇xL(x,λ,μ)=0
- g i ( x ) ≤ 0 g_i (x) \leq 0 gi(x)≤0
- h i ( x ) = 0 h_i(x) =0 hi(x)=0
- μ i ≥ 0 \mu_i \geq 0 μi≥0
- μ i g i ( x ) = 0 \mu_ig_i(x) =0 μigi(x)=0
其中第三个条件 h i ( x ) = 0 h_i(x) =0 hi(x)=0等式约束和第二个条件 g i ( x ) ≤ 0 g_i (x) \leq 0 gi(x)≤0不等式约束是本身应该满足的约束;第一个条件 ∇ x L ( x , λ , μ ) = 0 \nabla_x L(x,\lambda,\mu) = \pmb 0 ∇xL(x,λ,μ)=0和拉格朗日乘子法相同。
第四个条件称为对偶可行性条件;
第五个条件称为互补松弛条件,而且当一个变量取非零值时,另一个变量必须取零。
KKT条件是取得极值的必要条件,但如果一个优化问题是凸优化问题,则KKT条件是取得极小值的充分条件。
Slater条件
Slater条件:一个凸优化问题如果存在一个候选
x
x
x使得所有不等式约束都是严格满足的,即对于所有的
i
i
i都有
g
i
(
x
)
<
0
g_i(x) < 0
gi(x)<0,也就是说,在不等式约束区域内部至少有一个可行点,则存在
(
x
∗
,
λ
∗
,
μ
∗
)
(x^*,\lambda^*,\mu^*)
(x∗,λ∗,μ∗)使得它们同时为原问题和对偶问题的最优解,即
p
∗
=
d
∗
=
L
(
x
∗
,
λ
∗
,
μ
∗
)
p^*=d^*= L(x^*,\lambda^*,\mu^*)
p∗=d∗=L(x∗,λ∗,μ∗)
Slater条件是强对偶成立的充分条件而不是必要条件。
小结
Slater条件和KKT条件都是用来判断最优化问题是否有解的条件。它们之间的关系可以总结如下:
- Slater条件是一种充分条件,当最优化问题满足Slater条件时,会保证强对偶性成立,并且原始问题和对偶问题都存在最优解。具体来说,Slater条件要求不等式约束条件 g i ( x ) ≤ 0 g_i(x) \leq 0 gi(x)≤0 和等式约束条件 h i ( x ) = 0 h_i(x)=0 hi(x)=0 满足严格可行性,即存在一个 x x x使得所有的不等式约束条件 g i ( x ) < 0 g_i(x) < 0 gi(x)<0 均严格成立。
- KKT条件是一组必要条件,可以用于判断某个点是否为最优解。对于有约束的最优化问题,其KKT条件包括互补松弛条件、不等式约束条件的拉格朗日乘子大于等于零以及梯度为零。若最优化问题的解满足KKT条件,则该解是最优解的必要条件。
需要注意的是,Slater条件只是强对偶性的一种充分条件,而不是必要条件。也就是说,如果一个问题不满足Slater条件,仍然有可能存在最优解以及强对偶性。而KKT条件则是最优解的必要条件,但不一定是充分条件,也就是说,一个满足KKT条件的点并不一定是最优解。
因此,在实际求解问题时,我们通常需要结合Slater条件和KKT条件来进行判断,以保证得到的解是可行的、正确的,并且满足约束条件。
最优化方法
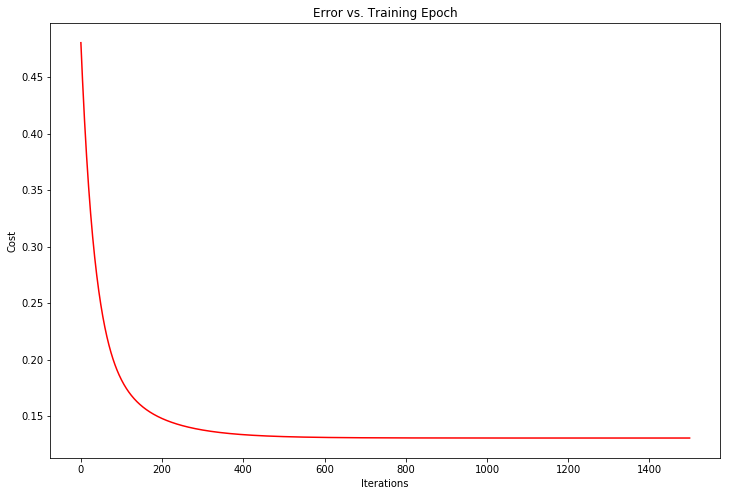
梯度下降法
梯度下降法(gradient descent)或最速下降法是求解无约束最优化问题的一种最常用的方法,它的优点是实现简单。梯度下降法是一种迭代算法,每一步需要求解目标函数的梯度向量。
假设
f
(
x
)
f(x)
f(x)是
R
n
\Bbb R^n
Rn是具有一阶连续偏导数的函数。要求解的无约束最优化问题是
min
x
∈
R
n
f
(
x
)
(18)
\min_{x \in \Bbb R^n} f(x) \tag{18}
x∈Rnminf(x)(18)
x
∗
x^*
x∗表示目标函数
f
(
x
)
f(x)
f(x)的极小值点。
梯度下降法通过选择适当的初值 x ( 0 ) x^{(0)} x(0),不断迭代,更新 x x x的值,进行目标函数的极小化,直到收敛。由于负梯度方向是使函数值下降最快的方向,在迭代的每一步,以负梯度方向更新 x x x的值,从而达到减少函数值的目的。
由于
f
(
x
)
f(x)
f(x)具有一阶连续偏导数,若第
k
k
k次迭代值为
x
(
k
)
x^{(k)}
x(k),则可将
f
(
x
)
f(x)
f(x)在
x
(
k
)
x^{(k)}
x(k)附近进行一阶泰勒展开:
f
(
x
)
=
f
(
x
(
k
)
)
+
g
k
T
(
x
−
x
(
k
)
)
(19)
f(x) = f(x^{(k)}) + g_k^T(x-x^{(k)}) \tag{19}
f(x)=f(x(k))+gkT(x−x(k))(19)
在人工智能高等数学中我们知道在
x
=
a
x=a
x=a点的泰勒展开式为:
g
(
x
)
=
f
(
a
)
+
f
′
(
a
)
1
!
(
x
−
a
)
+
f
′
′
(
a
)
2
!
(
x
−
a
)
2
+
f
3
(
a
)
3
!
(
x
−
a
)
3
+
.
.
.
+
f
n
(
a
)
n
!
(
x
−
a
)
n
(20)
g(x) = f(a) + \frac{f^\prime(a)}{1!}(x-a) + \frac{f^{\prime\prime}(a)}{2!}(x-a)^2 + \frac{f^3(a)}{3!}(x-a)^3 + ... + \frac{f^n(a)}{n!}(x-a)^n \tag{20}
g(x)=f(a)+1!f′(a)(x−a)+2!f′′(a)(x−a)2+3!f3(a)(x−a)3+...+n!fn(a)(x−a)n(20)
这里去掉了高阶项就得到了公式
(
19
)
(19)
(19),
g
k
=
g
(
x
(
k
)
)
=
∇
f
(
x
(
k
)
)
g_k=g(x^{(k)})=\nabla f(x^{(k)})
gk=g(x(k))=∇f(x(k))为
f
(
x
)
f(x)
f(x)在
x
(
k
)
x^{(k)}
x(k)的梯度,即一阶偏导。
求出第
k
+
1
k+1
k+1次迭代值
x
(
k
+
1
)
x^{(k+1)}
x(k+1):
x
(
k
+
1
)
←
x
(
k
)
+
λ
k
p
k
(21)
x^{(k+1)} \leftarrow x^{(k)} + \lambda_k p_k \tag{21}
x(k+1)←x(k)+λkpk(21)
其中,
p
k
p_k
pk是搜索方向,取负梯度方向
p
k
=
−
∇
f
(
x
(
k
)
)
p_k= -\nabla f(x^{(k)})
pk=−∇f(x(k)),
λ
k
\lambda_k
λk是步长,这里由一维搜索确定,即找到
λ
k
\lambda_k
λk使得
f
(
x
(
k
)
+
λ
k
p
k
)
=
min
λ
≥
0
f
(
x
(
k
)
+
λ
p
k
)
(22)
f(x^{(k)} + \lambda_k p_k) = \min_{\lambda \geq 0} f(x^{(k)} + \lambda p_k) \tag{22}
f(x(k)+λkpk)=λ≥0minf(x(k)+λpk)(22)
一维搜索是一种优化算法,也被称为线性搜索。在机器学习中,一维搜索通常是用来确定如何更新模型参数的步长或学习率,以最小化训练数据上的损失函数。
一维搜索可以简单理解为在某个方向上寻找一个合适的步长,使得当前位置向这个方向前进这个步长之后,能够使目标函数(或者损失函数)达到最小值。其实现过程通常是沿着负梯度方向进行搜索,并通过逐步缩小搜索范围和增加精度等方法,找到一个近似的最优解。
因为一维搜索只在一个方向上进行搜索,在复杂的高维问题中很少直接使用,通常会作为其他更复杂优化算法的辅助手段。
梯度下降法算法如下:
输入: 目标函数 f ( x ) f(x) f(x),梯度函数 g ( x ) = ∇ f ( x ) g(x) = \nabla f(x) g(x)=∇f(x),计算精度 ϵ \epsilon ϵ;
输出: f ( x ) f(x) f(x)的极小点 x ∗ x^* x∗。
(1) 取初值 x ( 0 ) ∈ R n x^{(0)} \in \Bbb R^n x(0)∈Rn,令 k = 0 k=0 k=0。
(2) 计算 f ( x ( k ) ) f(x^{(k)}) f(x(k))。
(3) 计算梯度
g
k
=
g
(
x
(
k
)
)
g_k=g(x^{(k)})
gk=g(x(k)),当
∣
∣
g
k
∣
∣
<
ϵ
||g_k|| < \epsilon
∣∣gk∣∣<ϵ时,停止迭代,令
x
∗
=
x
(
k
)
x^*=x^{(k)}
x∗=x(k);否则,令
p
k
=
−
g
(
x
(
k
)
)
p_k=-g(x^{(k)})
pk=−g(x(k)),求
λ
k
\lambda_k
λk使
f
(
x
(
k
)
+
λ
k
p
k
)
=
min
λ
≥
0
f
(
x
(
k
)
+
λ
p
k
)
f(x^{(k)} + \lambda_k p_k) = \min_{\lambda \geq 0} f(x^{(k)} + \lambda p_k)
f(x(k)+λkpk)=λ≥0minf(x(k)+λpk)
(4) 置
x
(
k
+
1
)
=
x
(
k
)
+
λ
k
p
k
x^{(k+1)}=x^{(k)} + \lambda_kp_k
x(k+1)=x(k)+λkpk,计算
f
(
x
(
k
+
1
)
)
f(x^{(k+1)})
f(x(k+1))
当 ∣ ∣ f ( x ( k + 1 ) ) − f ( x ( k ) ) ∣ ∣ < ϵ ||f(x^{(k+1)}) - f(x^{(k)})|| < \epsilon ∣∣f(x(k+1))−f(x(k))∣∣<ϵ或 ∣ ∣ x ( k + 1 ) − x ( k ) ∣ ∣ < ϵ ||x^{(k+1)} - x^{(k)}|| < \epsilon ∣∣x(k+1)−x(k)∣∣<ϵ时,停止迭代,令 x ∗ = x ( k + 1 ) x^*=x^{(k+1)} x∗=x(k+1)。
(5) 否则,置 k = k + 1 k=k+1 k=k+1,转(3)。
当目标函数是凸函数时,梯度下降法的解释全局最优解。但一般情况下,其解不保证是全局最优解。且收敛速度也未必是很快的。
如果是无约束优化问题,想要收敛速度快的话,可以考虑牛顿法或拟牛顿法。
牛顿法和拟牛顿法都是求解无约束最优化问题的常用方法,具有收敛速度快的优点。牛顿法是迭代算法,每一步需要求解目标函数的海森矩阵的逆矩阵,计算比较复杂,而且有时候海森矩阵不一定存在逆阵。拟牛顿法通过正定矩阵近似海森矩阵的逆矩阵或海森矩阵,简化了这一计算过程。