1. 运动功能说明
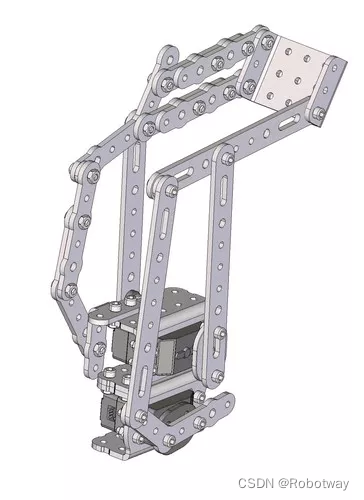
2自由度并联关节模组的主要运动方式为用舵机带动连杆摆动。
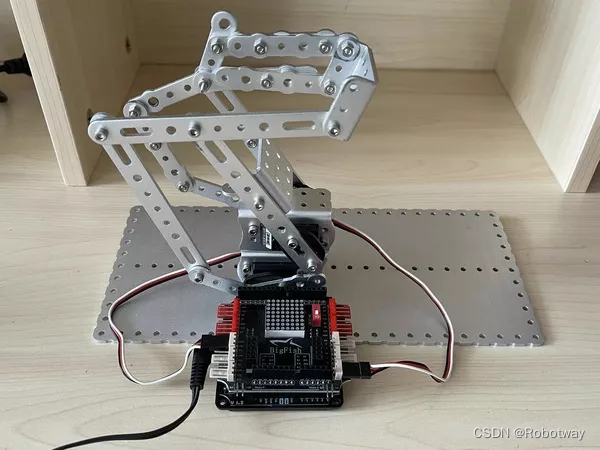
2. 结构说明
构成本模组的零部件主要是舵机(行程0度~180度)、舵机支架、舵机输出头、连杆、螺丝、螺母等。此模组的机械系统介绍及运动学算法讲解可参考【R306】5自由度并联机械臂-搬运 。
3. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1扩展板 |
| 电池 | 7.4V锂电池 |
电路连接:2个舵机分别连接在Bigfish扩展板的D4、D12端口。
4. 运动功能实现
编程环境:Arduino 1.8.19
将参考例程(sketch_apr26a.ino)下载到主控板,实验效果可参考官网演示视频。
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-05-12 https://www.robotway.com/
------------------------------*/
#include <Servo.h>
Servo servo;
int i = 0;
void setup() {
// put your setup code here, to run once:
servo.attach(4);
servo.attach(12);
servo.write(15);
}
void loop() {
// put your main code here, to run repeatedly:
for(i = 15; i <=130; i++)
{
servo.write(i);
delay(10);
}
for(i = 130; i >=15; i--)
{
servo.write(i);
delay(10);
}
}程序源代码及模组3D文件资料内容详见 2自由度并联关节-概述