本文参考的文章:
-Ardupilot开发环境搭建(Ubuntu18.04,20190407)
-Ardupilot环境搭建
1、下载文件
1.在GitHub上下载ardupilot文件,网速很慢的时候科学上网。
git clone https://github.com/ArduPilot/ardupilot
cd ardupilot
git submodule update --init --recursive
笔者在输入第三条指令的时候 git submodule update --init --recursive的时候总是遇到问题,导致后面总编译不成功,我建议打开每一个文件夹查看下载是否完全,有时候下载不完全,空文件夹或者文件夹中有一个.git文件,但是输入 git submodule update --init --recursive往往认为下载完毕,可以手动删除该文件夹,他就会重新下载,多重复几次就可以把module文件夹补全。建议对比github上的文件手动找一下目录。
2.运行.sh文件
在ardupilot目录下执行下面的命令,安装需要的依赖
Tools/environment_install/install-prereqs-ubuntu.sh -y
重新载入一下环境变量
~/.profile
到此Ardupilot环境已经搭配好。
3.编译源码
固件编译,编译的是多旋翼仿真固件
注意事项:
- ardupilot源码已经转向Waf工具编译,所以编译指令有所区别,并且需要注意一定在ardupilot安装的根目录执行,这点与make不同。
waf编译前需要配置飞控运行板卡,但是之前网上教程所提到px4-v1、px4-v3等板卡名称都已经被替换,可以使用./waf
list_boards命令查询支持板卡对应的参数。
对应指令:
cd ardupilot
查询支持板卡对应的参数:
./waf list_boards
进行固件编译多旋翼仿真固件
./waf configure --board sitl
./waf copter
./waf copter可替换为./waf copter -v 查看编译全过程,出现错误也可以看到详细出错的问题:如下
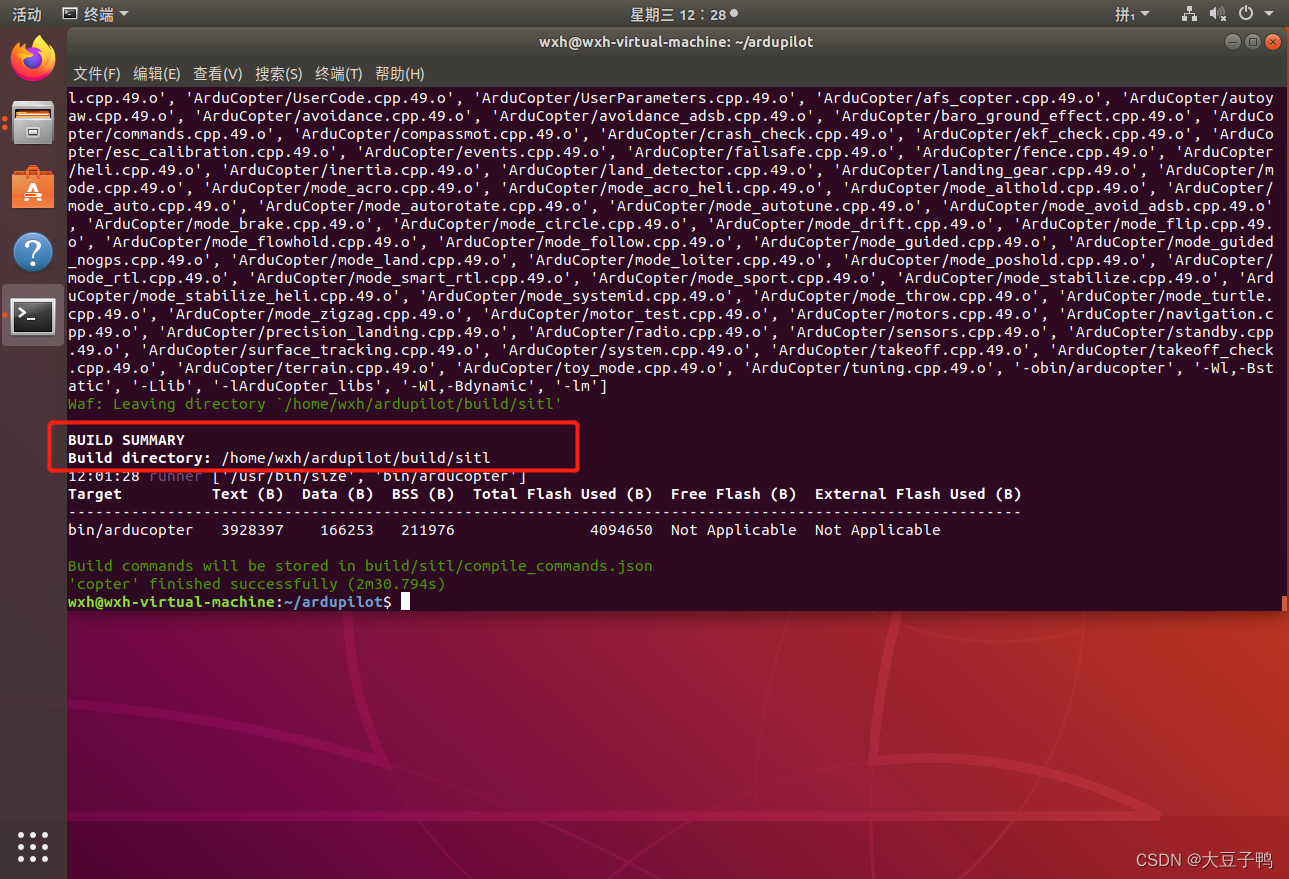
编程成功,哭了,一天半终于解决了:






![UGUI进阶知识[二十九]循环GridView](https://img-blog.csdnimg.cn/1f160652ccbd4211b36647f641513cef.png)