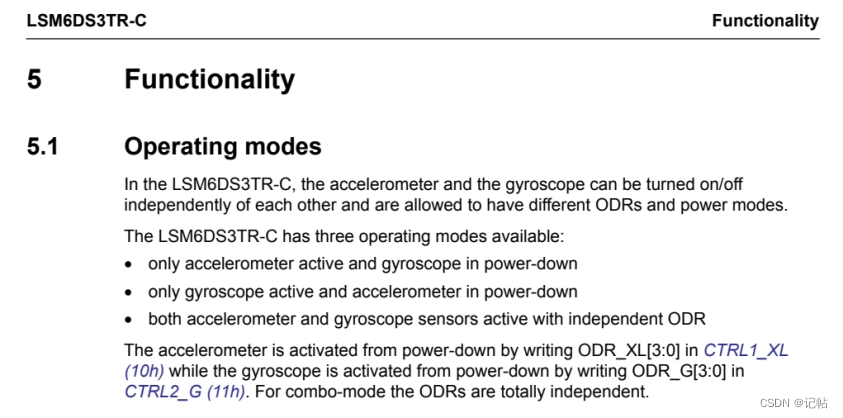
工作模式
在LSM6DS3TR-C中,加速度计和陀螺仪可以独立地开启/关闭,并且可以拥有不同的ODR和功耗模式。
LSM6DS3TR-C有三种可用的操作模式:
● 仅加速度计活动,陀螺仪处于断电状态
● 仅陀螺仪活动,加速度计处于断电状态
● 加速度计和陀螺仪传感器同时活动,ODR独立
视频教学
https://www.bilibili.com/video/BV19P411Q7fP/
驱动LSM6DS3TR-C实现高效运动检测与数据采集(1)----获取ID
样品申请
https://www.wjx.top/vm/OhcKxJk.aspx#
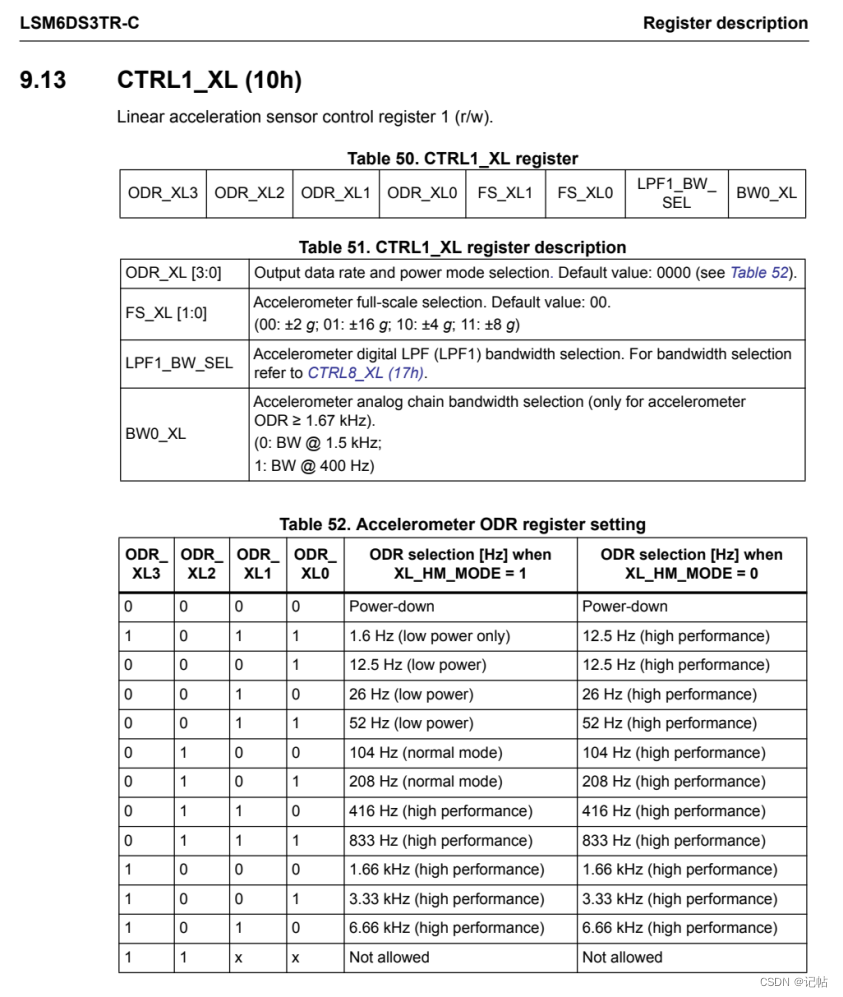
设置加速度速率
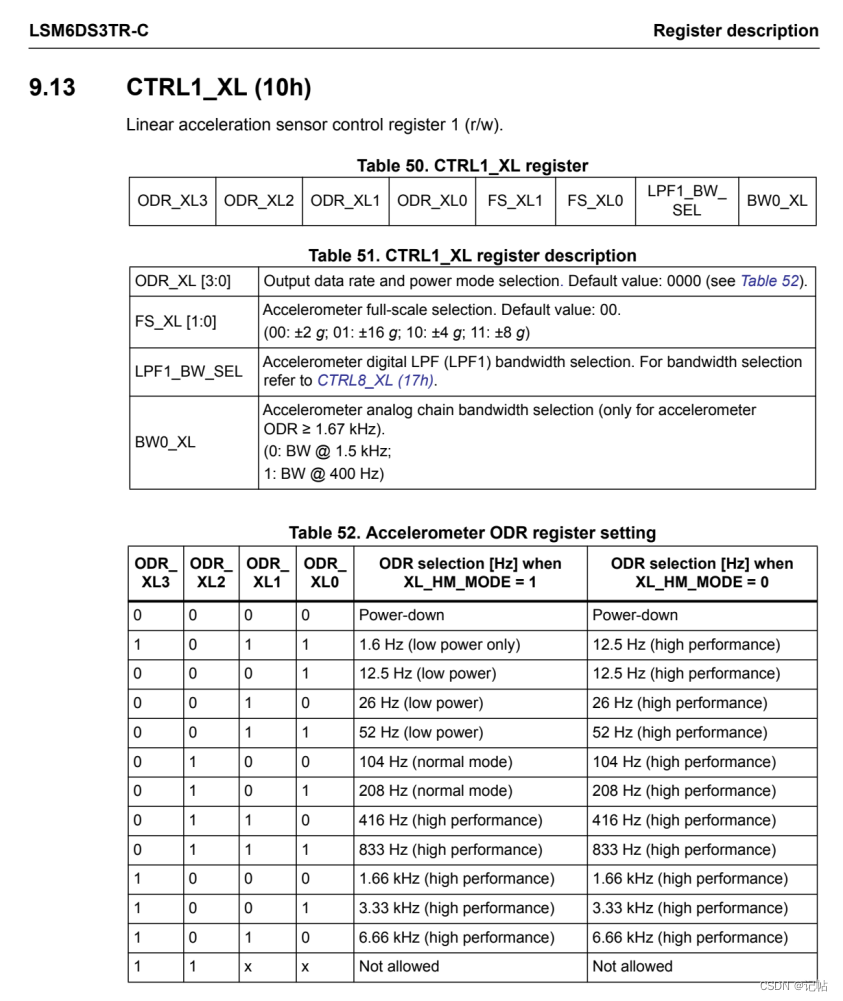
设置加速度速率可以配置CTRL1_XL (10h)寄存器,ODR_XL [3:0]可以设置速率。
参考例程序中对应的设置加速度速率程序函数,如下所示。
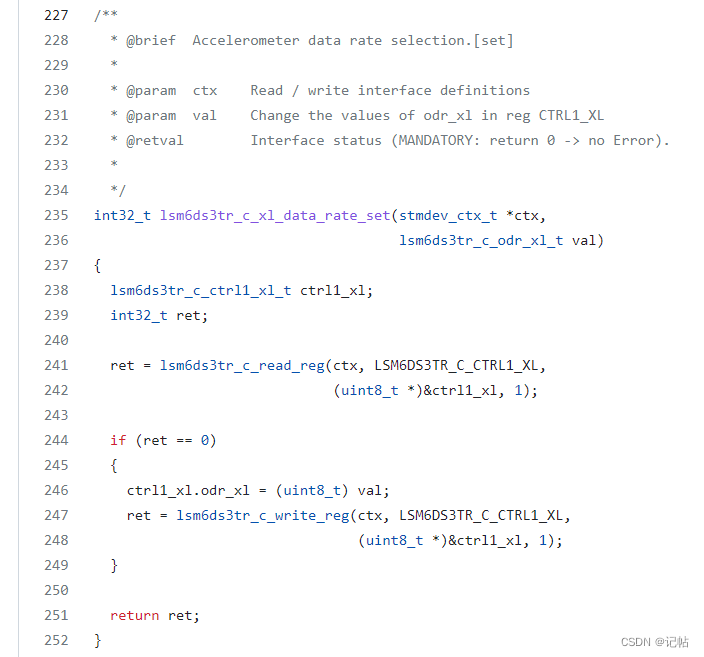
设置加速度速率代码如下所示。
#define LSM6DS3TRC_CTRL1_XL 0x10
//Linear acceleration out data rate
#define LSM6DS3TRC_ACC_RATE_0 0x00
#define LSM6DS3TRC_ACC_RATE_1HZ6 0xB0
#define LSM6DS3TRC_ACC_RATE_12HZ5 0x10
#define LSM6DS3TRC_ACC_RATE_26HZ 0x20
#define LSM6DS3TRC_ACC_RATE_52HZ 0x30
#define LSM6DS3TRC_ACC_RATE_104HZ 0x40
#define LSM6DS3TRC_ACC_RATE_208HZ 0x50
#define LSM6DS3TRC_ACC_RATE_416HZ 0x60
#define LSM6DS3TRC_ACC_RATE_833HZ 0x70
#define LSM6DS3TRC_ACC_RATE_1660HZ 0x80
#define LSM6DS3TRC_ACC_RATE_3330HZ 0x90
#define LSM6DS3TRC_ACC_RATE_6660HZ 0xA0
/***************************************************************************************************************
LSM6DS3TRC Set accelerometer data rate
****************************************************************************************************************/
void LSM6DS3TRC_Set_Accelerometer_Rate(uint8_t rate)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL1_XL, buf, 1);
buf[0] |= rate;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL1_XL, buf, 1);
}
设置速率为12.5Hz的波形如下所示.
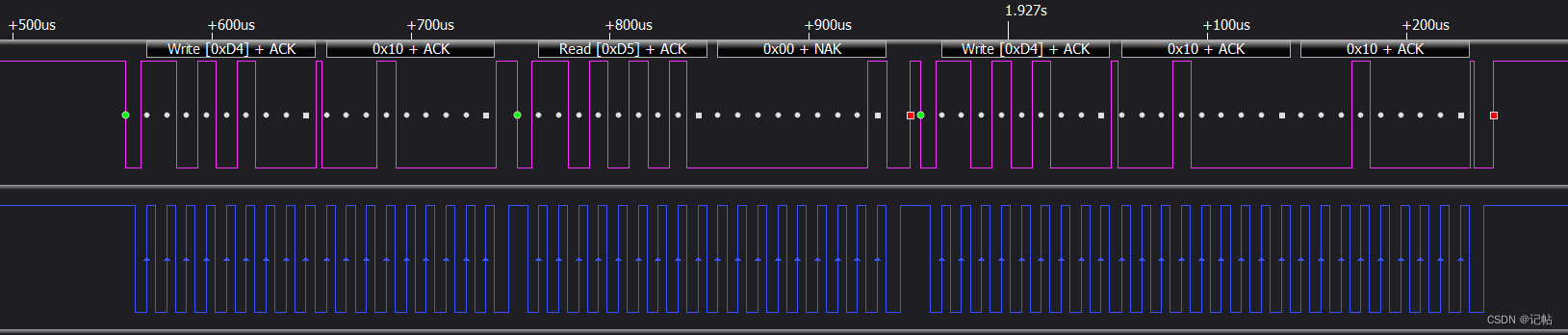
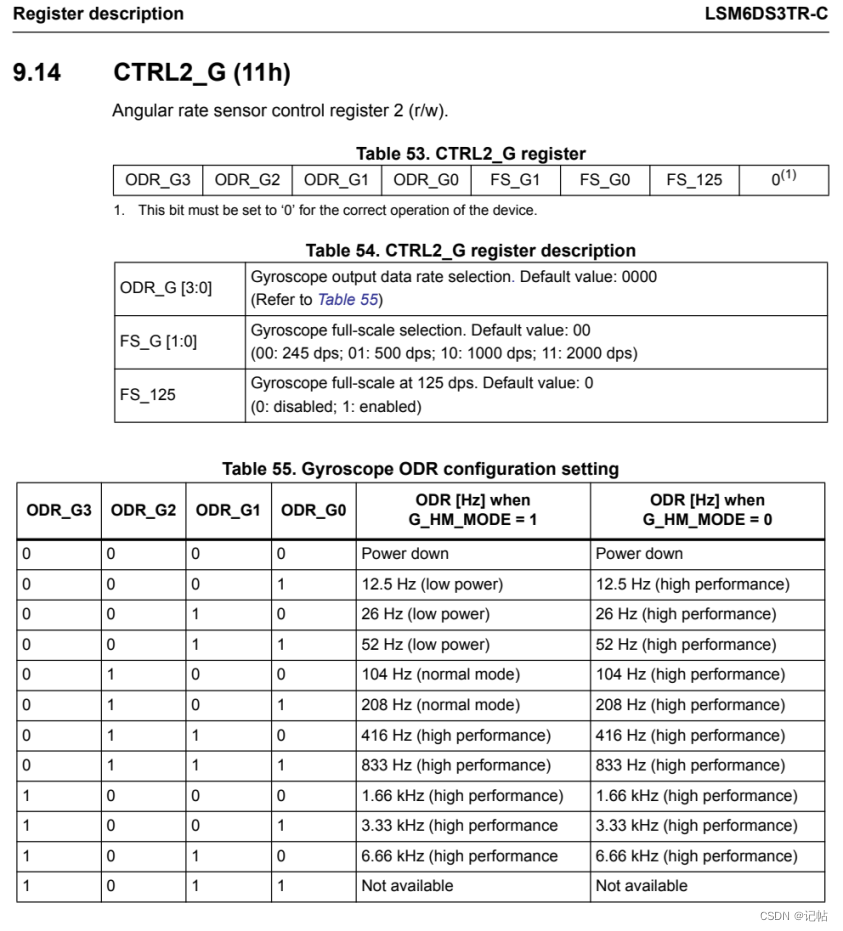
设置角速度速率
设置角速度速率可以配置CTRL2_G (11h))寄存器,ODR_G [3:0]可以设置速率。
参考例程序中对应的设置角速度速率程序函数,如下所示。
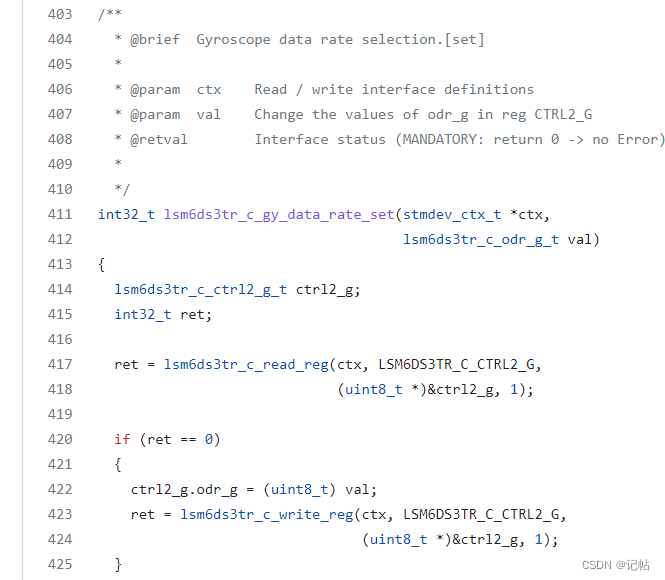
设置角速度速率代码如下所示。
#define LSM6DS3TRC_CTRL2_G 0x11
//Linear gyroscope out data rate
#define LSM6DS3TRC_GYR_RATE_0 0x00
#define LSM6DS3TRC_GYR_RATE_1HZ6 0xB0
#define LSM6DS3TRC_GYR_RATE_12HZ5 0x10
#define LSM6DS3TRC_GYR_RATE_26HZ 0x20
#define LSM6DS3TRC_GYR_RATE_52HZ 0x30
#define LSM6DS3TRC_GYR_RATE_104HZ 0x40
#define LSM6DS3TRC_GYR_RATE_208HZ 0x50
#define LSM6DS3TRC_GYR_RATE_416HZ 0x60
#define LSM6DS3TRC_GYR_RATE_833HZ 0x70
#define LSM6DS3TRC_GYR_RATE_1660HZ 0x80
#define LSM6DS3TRC_GYR_RATE_3330HZ 0x90
#define LSM6DS3TRC_GYR_RATE_6660HZ 0xA0
/***************************************************************************************************************
LSM6DS3TRC Set gyroscope data rate
****************************************************************************************************************/
void LSM6DS3TRC_Set_Gyroscope_Rate(uint8_t rate)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL2_G, buf, 1);
buf[0] |= rate;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL2_G, buf, 1);
}
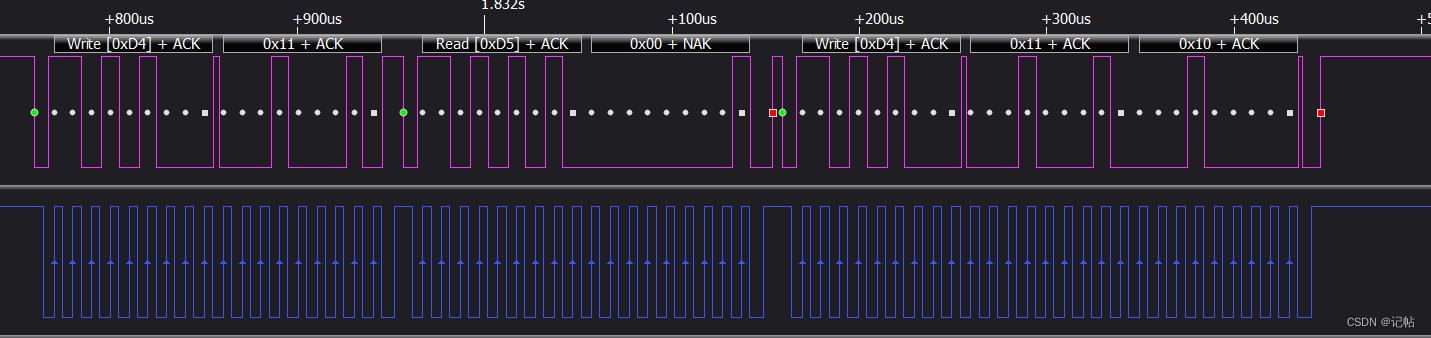
设置速率为12.5Hz的波形如下所示。
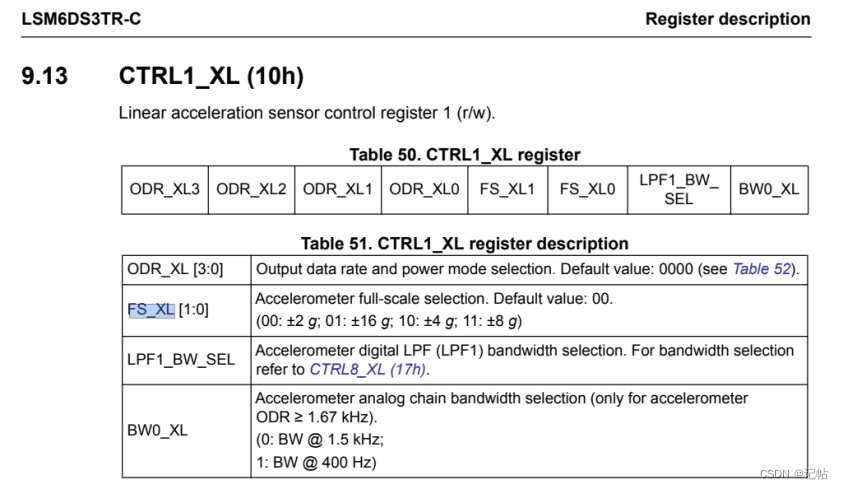
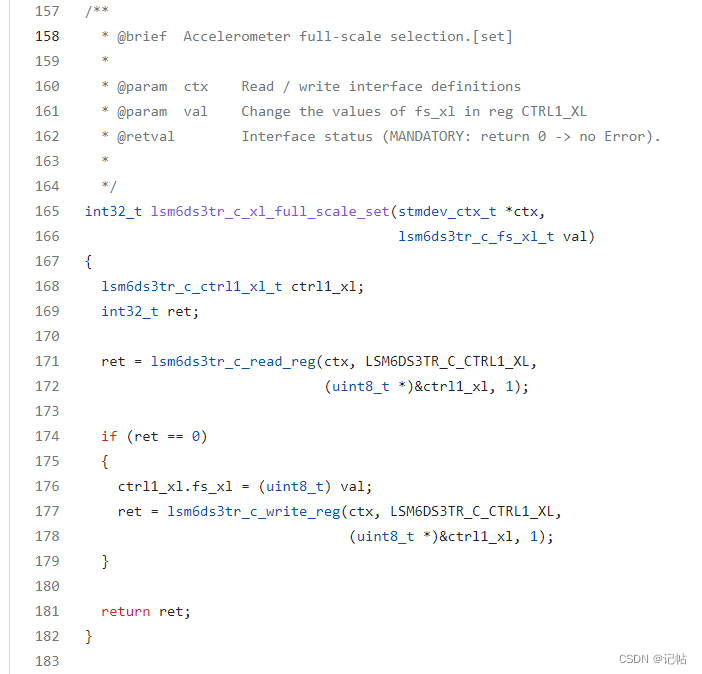
设置加速度量程选择
设置加速度量程可以配置CTRL1_XL (10h)寄存器的FS_XL,FS_XL [1:0]可以设置量程。
参考例程序中对应的设置加速度量程程序函数,如下所示。
#define LSM6DS3TRC_CTRL1_XL 0x10
//Accelerometer full-scale.
#define LSM6DS3TRC_ACC_FSXL_2G 0x00
#define LSM6DS3TRC_ACC_FSXL_16G 0x04
#define LSM6DS3TRC_ACC_FSXL_4G 0x08
#define LSM6DS3TRC_ACC_FSXL_8G 0x0C
/***************************************************************************************************************
LSM6DS3TRC Set accelerometer full-scale selection.
****************************************************************************************************************/
void LSM6DS3TRC_Set_Accelerometer_Fullscale(uint8_t value)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL1_XL, buf, 1);
buf[0] |= value;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL1_XL, buf, 1);
}
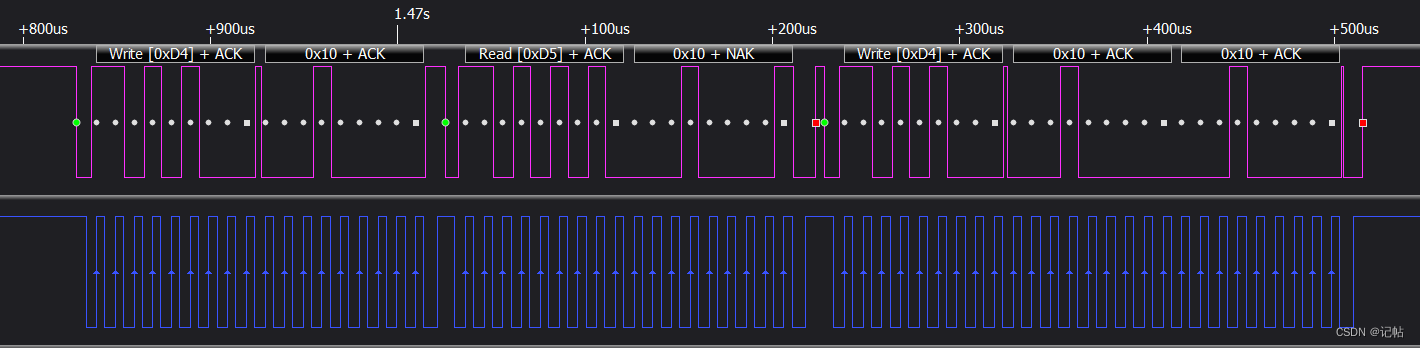
设置速率为2g的波形如下所示。
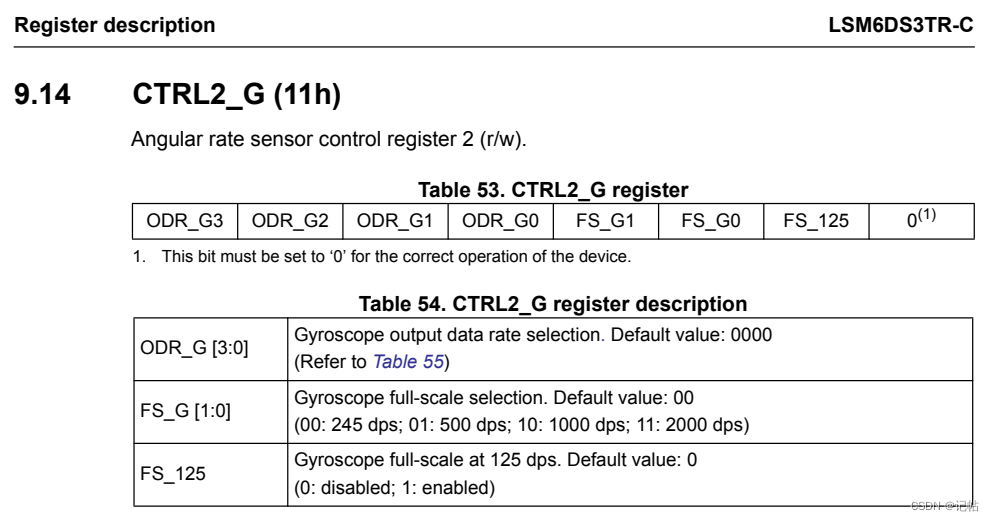
设置角速度量程选择
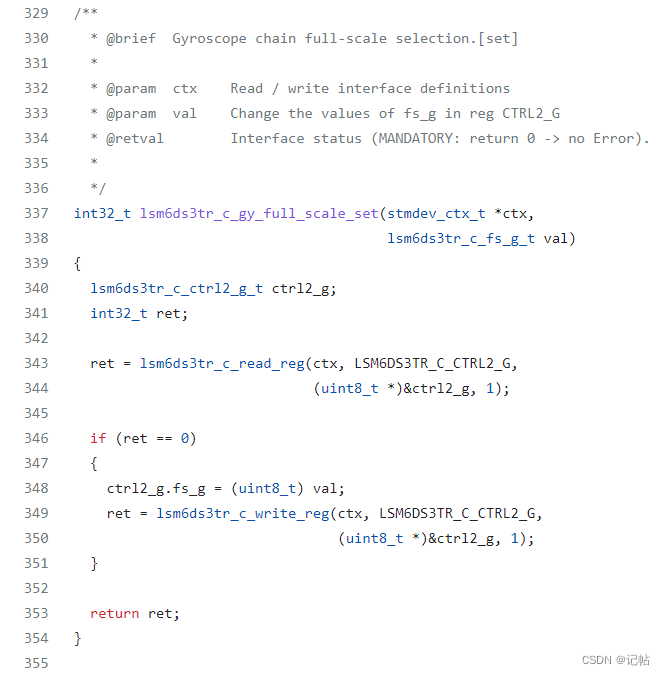
设置角速度量程可以配置CTRL2_G (11h)寄存器的FS_G,FS_G [1:0]可以设置量程。
参考例程序中对应的设置角速度量程程序函数,如下所示。
#define LSM6DS3TRC_CTRL2_G 0x11
//Gyroscope full-scale.
#define LSM6DS3TRC_GYR_FSG_245 0x00
#define LSM6DS3TRC_GYR_FSG_500 0x04
#define LSM6DS3TRC_GYR_FSG_1000 0x08
#define LSM6DS3TRC_GYR_FSG_2000 0x0C
/***************************************************************************************************************
LSM6DS3TRC Set gyroscope full-scale selection.
****************************************************************************************************************/
void LSM6DS3TRC_Set_Gyroscope_Fullscale(uint8_t value)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL2_G, buf, 1);
buf[0] |= value;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL2_G, buf, 1);
}
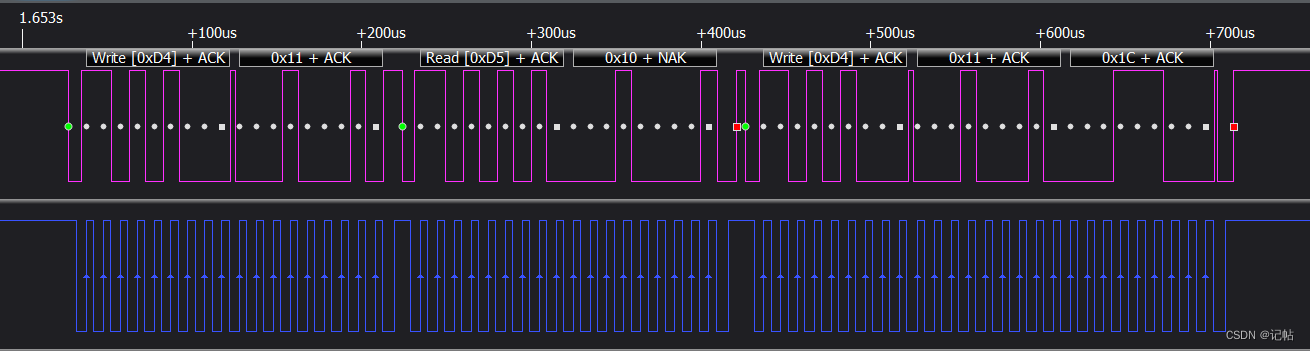
设置陀螺仪量程为2000的波形如下所示。
设置加速度参数
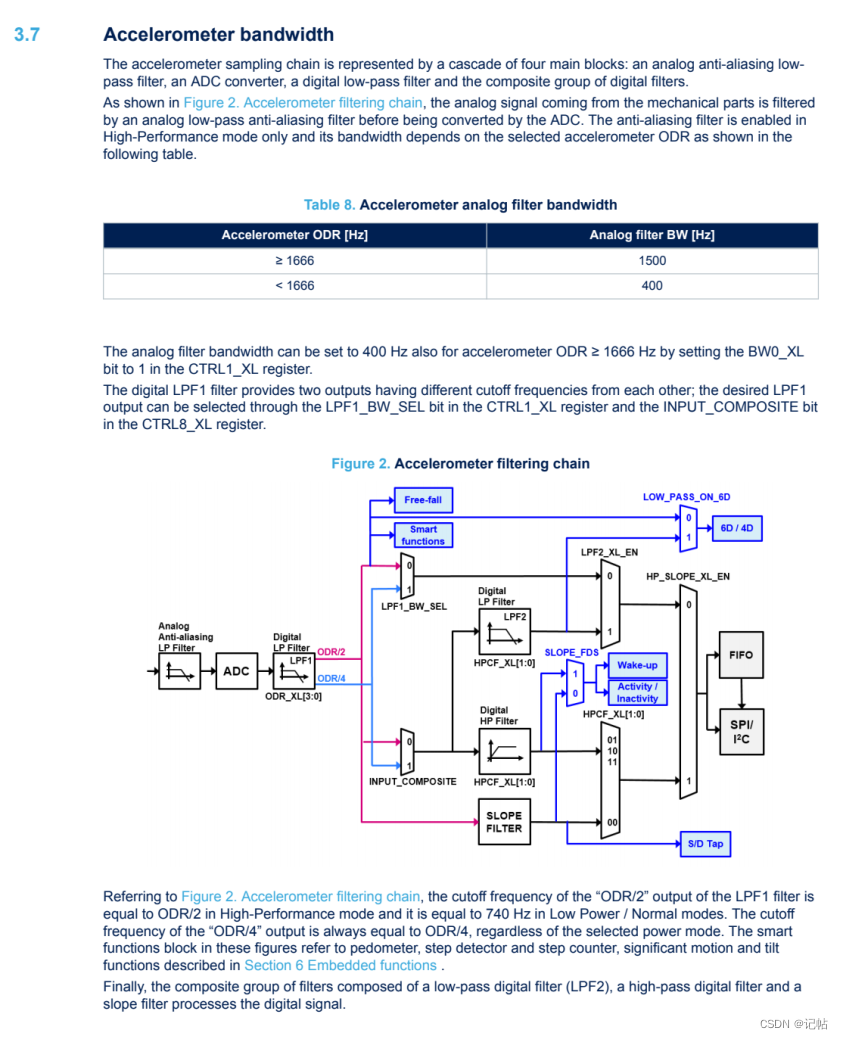
加速度带宽这个设置是用来确定加速度计数据的更新速度的。更高的带宽允许更高的频率信号通过,这意味着加速度计可以更快地响应运动的变化。
这个设置特别适用于加速度计的输出数据速率(ODR)大于或等于1.67kHz的情况。这是因为在这种高数据速率下,可能需要更宽的带宽来确保加速度计能够准确地测量快速变化的运动。例如,在高速运动的跟踪或者高精度的导航应用中,这个设置可能会很有用。
参考例程序中对应的设置加速度带宽选择程序函数,如下所示。
使用的函数如下。
#define LSM6DS3TR_C_XL_ANA_BW_400Hz 1
#define LSM6DS3TR_C_XL_LOW_NOISE_LP_ODR_DIV_100 0x11
/* Configure filtering chain(No aux interface) */
/* Accelerometer - analog filter */
lsm6ds3tr_c_xl_filter_analog_set(&dev_ctx,
LSM6DS3TR_C_XL_ANA_BW_400Hz);
/* Accelerometer - LPF1 path ( LPF2 not used )*/
//lsm6ds3tr_c_xl_lp1_bandwidth_set(&dev_ctx, LSM6DS3TR_C_XL_LP1_ODR_DIV_4);
/* Accelerometer - LPF1 + LPF2 path */
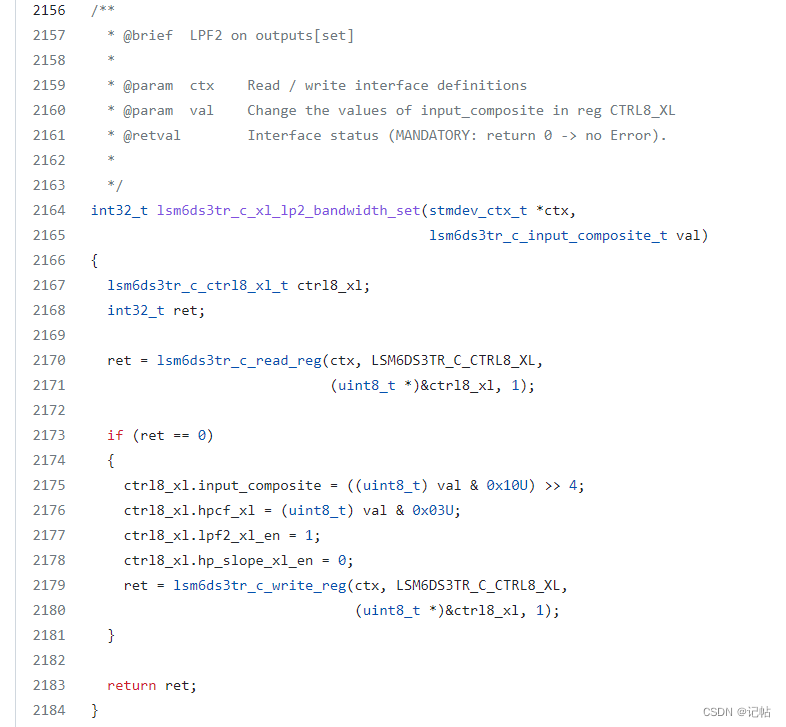
lsm6ds3tr_c_xl_lp2_bandwidth_set(&dev_ctx,
LSM6DS3TR_C_XL_LOW_NOISE_LP_ODR_DIV_100);
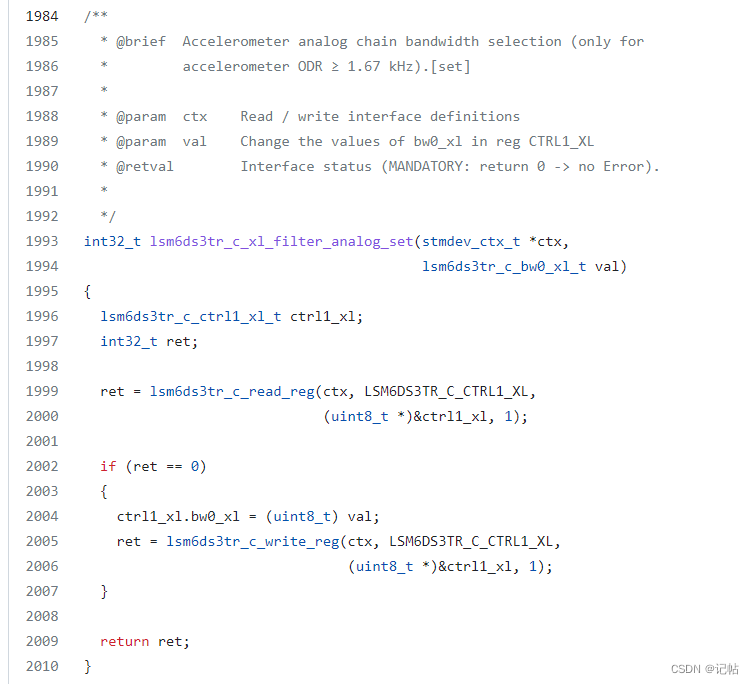
对于CTRL1_XL (10h)配置,主要有如下1个函数。
bw0_xl写入1,通过在CTRL1_XL寄存器中将BW0_XL位设置为1来将模拟滤波器的带宽设置为400 Hz。
ctrl1_xl.bw0_xl = (uint8_t) val;
对于CTRL8_XL(17h)配置,主要有如下4个函数。
((uint8_t) val & 0x10U) >> 4为(0x11 & 0x10)>> 4即ctrl8_xl.input_composite写入1;
ctrl8_xl.hpcf_xl = (uint8_t) val & 0x03U为(0x11 & 0x03)即ctrl8_xl.hpcf_xl写入1;
ctrl8_xl.lpf2_xl_en = 1即lpf2_xl_en写入1;
ctrl8_xl.hp_slope_xl_en = 0即hp_slope_xl_en写入0;
ctrl8_xl.input_composite = ((uint8_t) val & 0x10U) >> 4;
ctrl8_xl.hpcf_xl = (uint8_t) val & 0x03U;
ctrl8_xl.lpf2_xl_en = 1;
ctrl8_xl.hp_slope_xl_en = 0;
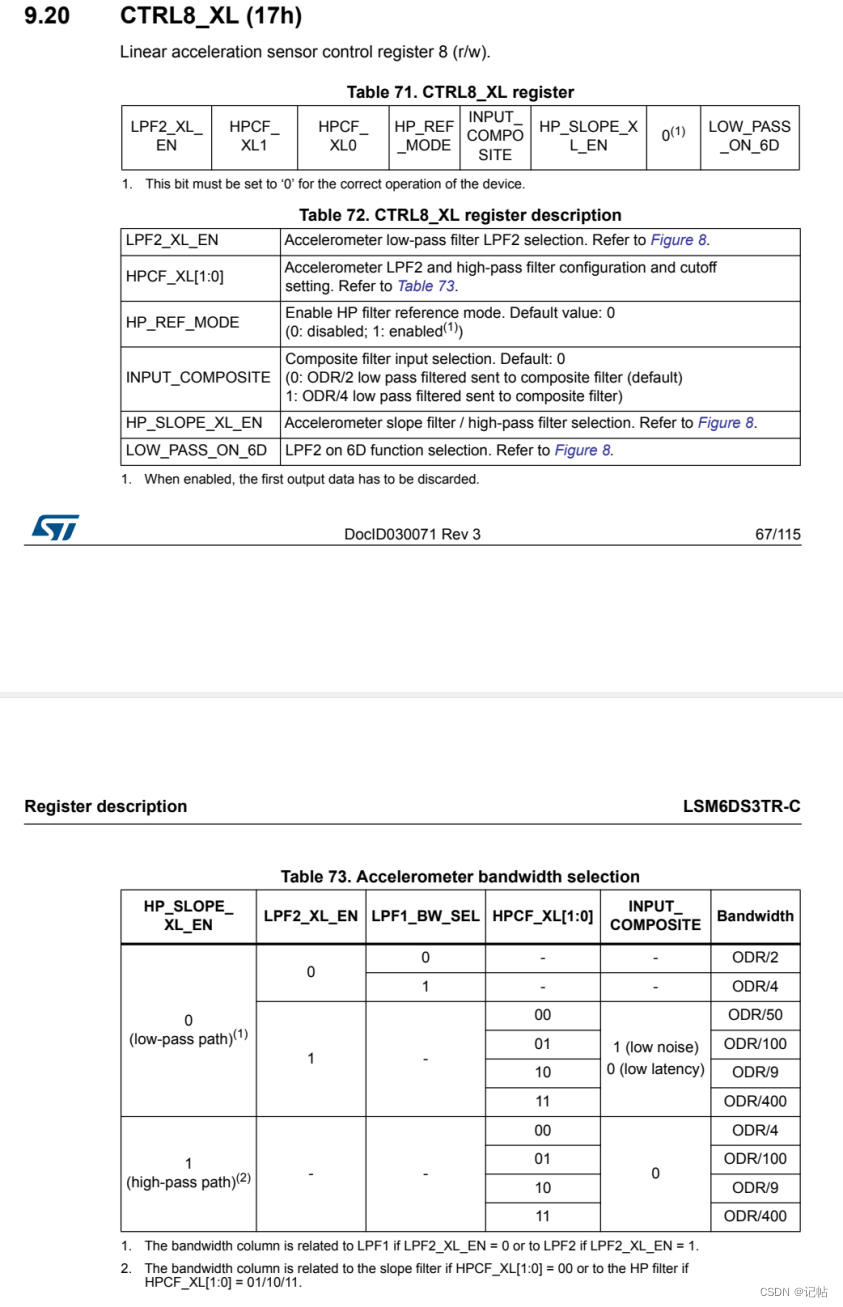
线性加速度滤波器寄存器在CTRL8_XL (17h)中,这些参数在CTRL8_XL寄存器中定义了加速度计的一些滤波器设置。以下是这些参数的区别:
LPF2_XL_EN - 加速度计低通滤波器LPF2的选择。
HPCF_XL[1:0] - 加速度计LPF2和高通滤波器的配置和截止设置。
HP_REF_MODE - 启用高通滤波器参考模式。默认值:0(0:禁用;1:启用(1))。启用后,必须丢弃第一个输出数据。
INPUT_COMPOSITE - 复合滤波器输入选择。默认值:0(0:将ODR/2低通滤波器输出发送到复合滤波器(默认);1:将ODR/4低通滤波器输出发送到复合滤波器)。
HP_SLOPE_XL_EN - 加速度计斜率滤波器/高通滤波器选择。
LOW_PASS_ON_6D - 6D功能上的LPF2选择。
降低采样率可以减少传感器生成的数据量,从而降低功耗和数据处理要求。这在某些应用场景中可能是有用的,特别是对于要求较低的数据更新率或对存储和传输资源有限的情况下。
模拟滤波器带宽的设置:
当加速度计的采样率(ODR)大于等于1666 Hz时,可以通过在CTRL1_XL寄存器中将BW0_XL位设置为1来将模拟滤波器的带宽设置为400 Hz。
数字低通滤波器LPF1的选择:
LPF1数字低通滤波器提供两个输出,它们具有不同的截止频率。可以通过在CTRL1_XL寄存器的LPF1_BW_SEL位和CTRL8_XL寄存器的INPUT_COMPOSITE位来选择所需的LPF1输出。这些位的设置将确定LPF1输出的截止频率。
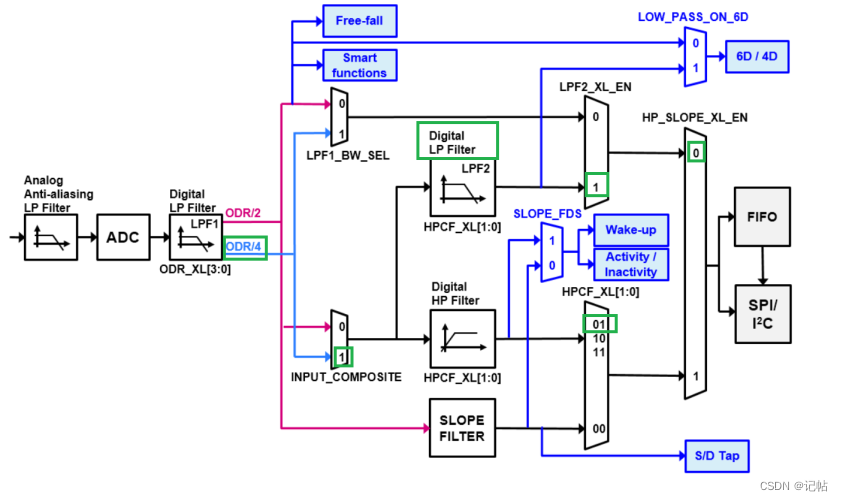
配置CTRL8_XL (17h)为LSM6DS3TRC_ACC_LOW_PASS_ODR_100 0xA8(1010 1000),流程图如下所示。
#define LSM6DS3TRC_CTRL1_XL 0x10
#define LSM6DS3TRC_CTRL8_XL 0x17
//Accelerometer analog chain bandwidth
#define LSM6DS3TRC_ACC_BW0XL_1500HZ 0x00
#define LSM6DS3TRC_ACC_BW0XL_400HZ 0x01
//Accelerometer bandwidth selection
#define LSM6DS3TRC_ACC_LOW_PASS_ODR_50 0x88
#define LSM6DS3TRC_ACC_LOW_PASS_ODR_100 0xA8
#define LSM6DS3TRC_ACC_LOW_PASS_ODR_9 0xC8
#define LSM6DS3TRC_ACC_LOW_PASS_ODR_400 0xE8
/***************************************************************************************************************
LSM6DS3TRC Set accelerometer analog chain bandwidth.
****************************************************************************************************************/
void LSM6DS3TRC_Set_Accelerometer_Bandwidth(uint8_t BW0XL, uint8_t ODR)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL1_XL, buf, 1);
buf[0] |= BW0XL;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL1_XL, buf, 1);
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL8_XL, buf, 1);
buf[0] |= ODR;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL8_XL, buf, 1);
}
设置加速度的刷新速度为400Hz和高通滤波器的截止频率被设置为加速度计的输出数据速率的百分之一的波形如下所示。
陀螺仪带宽配置
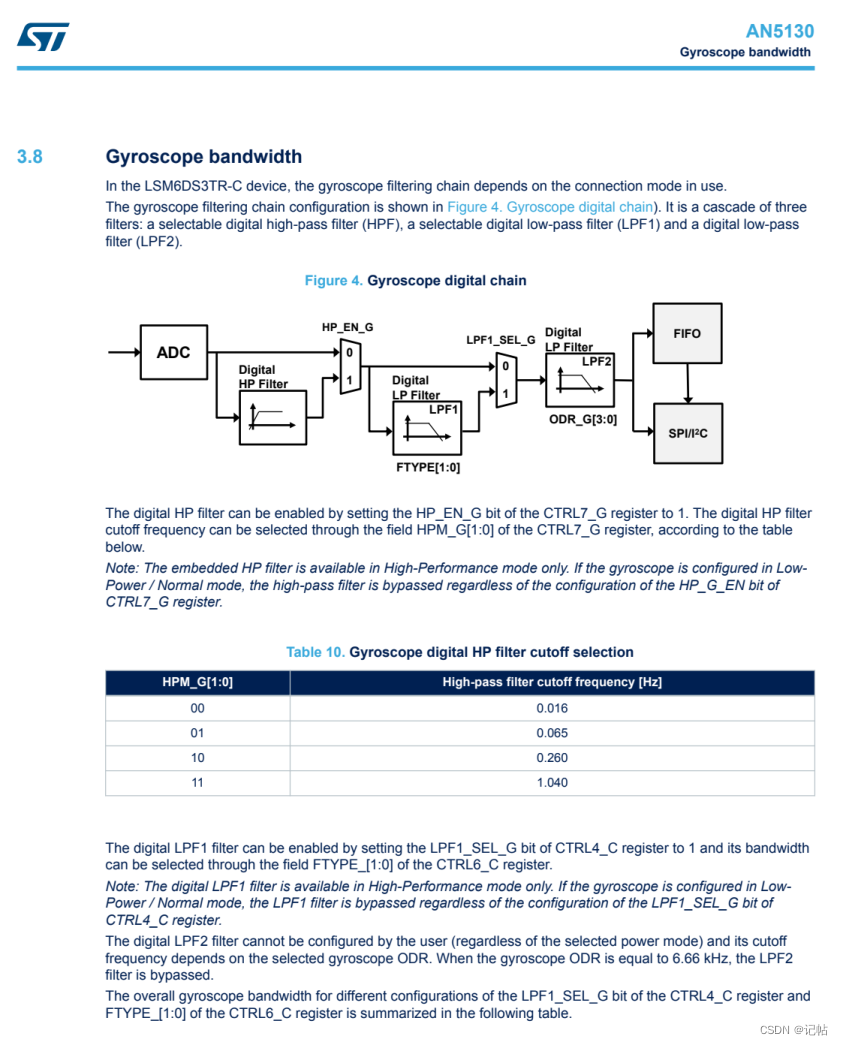
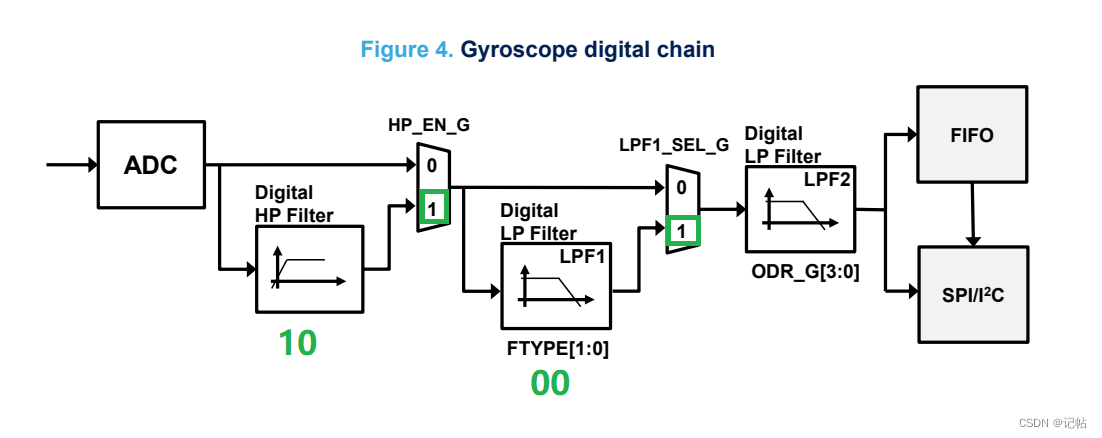
陀螺仪的带宽 在LSM6DS3TR-C器件中,陀螺仪滤波链取决于所使用的连接方式。
陀螺仪滤波链配置如下图所示。陀螺仪数字链)。这是一个三级的级联滤波器:一个可选数字高通滤波器(HPF),一个可选数字低通滤波器(LPF1)和一个数字低通 过滤器(LPF2)。
参考程序配置陀螺仪带宽代码如下所示。
使用的函数如下。
#define LSM6DS3TR_C_HP_260mHz_LP1_STRONG 0xA8
/* Gyroscope - filtering chain */
lsm6ds3tr_c_gy_band_pass_set(&dev_ctx,
LSM6DS3TR_C_HP_260mHz_LP1_STRONG);
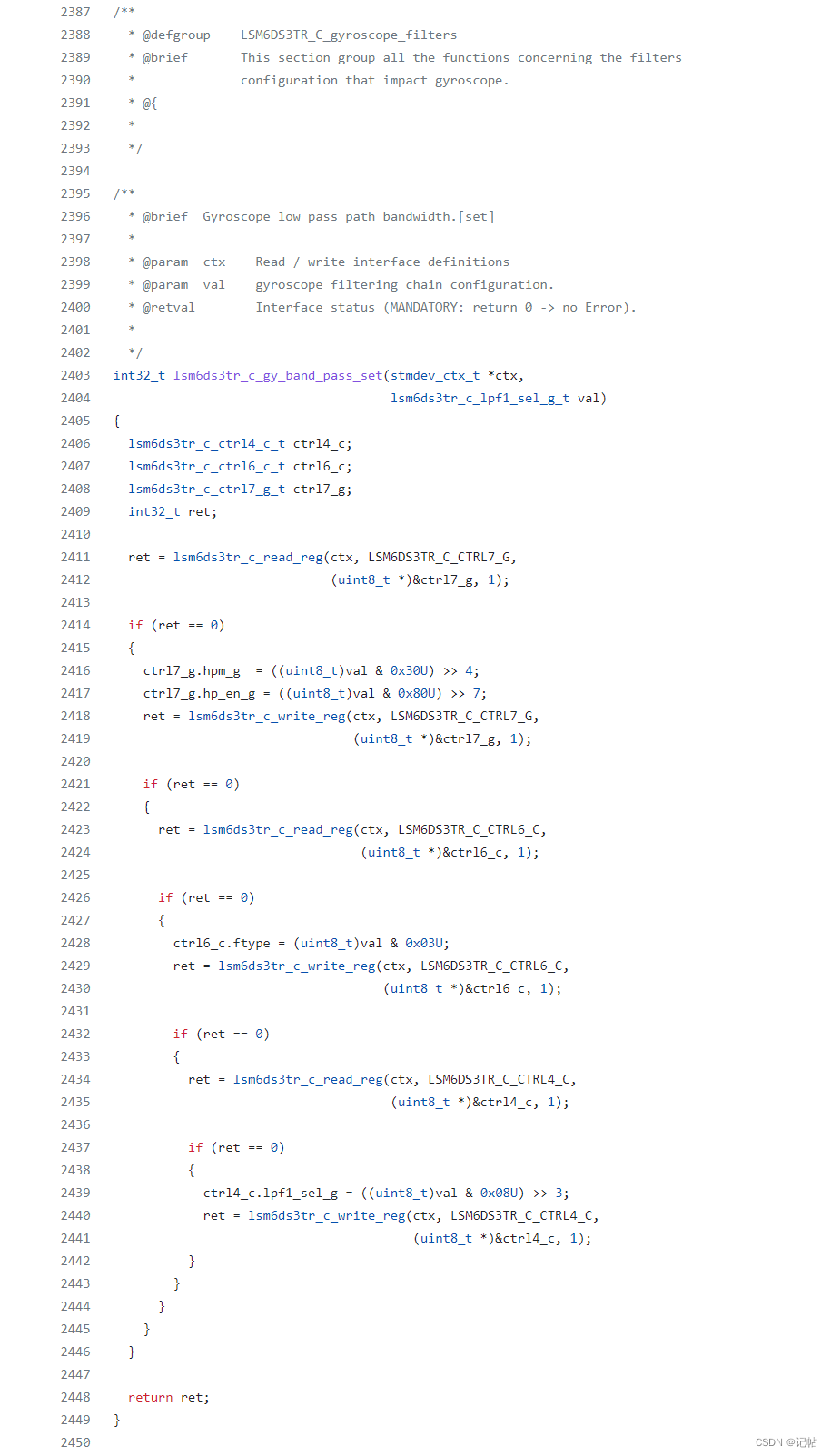
对于CTRL7_G (16h)配置,主要有如下2个函数。
((uint8_t)val & 0x30U) >> 4为(0xA8 & 0x30)>> 4即ctrl7_g.hpm_g写入10;
((uint8_t)val & 0x80U) >> 7为(0xA8 & 0x80)>> 7即ctrl7_g.hp_en_g写入1;
ctrl7_g.hpm_g = ((uint8_t)val & 0x30U) >> 4;
ctrl7_g.hp_en_g = ((uint8_t)val & 0x80U) >> 7;
对于CTRL6_G (15h)配置,主要有如下1个函数。
(uint8_t)val & 0x03U为(0xA8 & 0x03)即ctrl6_c.ftype写入00。
ctrl6_c.ftype = (uint8_t)val & 0x03U;
对于CTRL4_G (13h)配置,主要有如下1个函数。
((uint8_t)val & 0x08U) >> 3为(0xA8 & 0x08)>> 3即ctrl4_c.lpf1_sel_g写入1。
ctrl4_c.lpf1_sel_g = ((uint8_t)val & 0x08U) >> 3;
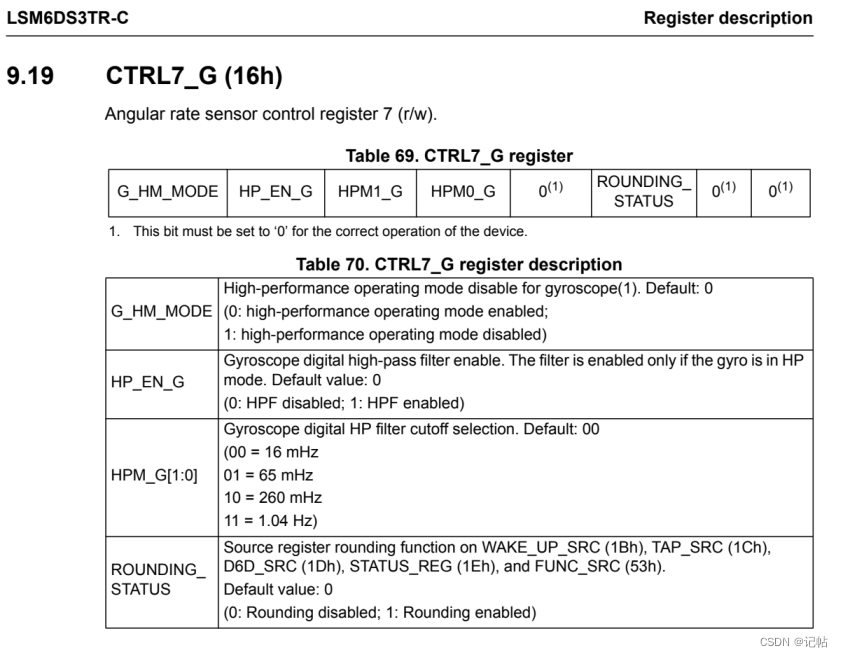
设置角速度控制寄存器可以配置CTRL7_G (16h),通过将CTRL7_G寄存器的HP_EN_G位设置为1,可以使能数字HP滤波器。同时G_HM_MODE默认情况下为0,即开启高性能模式。
数字高压滤波器截止频率可以通过CTRL7_G寄存器的HPM_G[1:0]字段来选择,如下表所示,这里选择配置为10,即260mHz。
//CTRL7_G register
#define LSM6DS3TRC_CTRL7_G_HM_MODE_ENABLE 0x00
#define LSM6DS3TRC_CTRL7_G_HM_MODE_DISABLE 0x80
#define LSM6DS3TRC_CTRL7_G_HP_EN_DISABLE 0x00
#define LSM6DS3TRC_CTRL7_G_HP_EN_ENABLE 0x40
#define LSM6DS3TRC_CTRL7_G_HPM_16MHZ 0x00
#define LSM6DS3TRC_CTRL7_G_HPM_65MHZ 0x10
#define LSM6DS3TRC_CTRL7_G_HPM_260MHZ 0x20
#define LSM6DS3TRC_CTRL7_G_HPM_1HZ04 0x30
#define LSM6DS3TRC_CTRL7_G_ROUNDING_STATUS_DISABLE 0x04
#define LSM6DS3TRC_CTRL7_G_ROUNDING_STATUS_ENABLE 0x00
/***************************************************************************************************************
LSM6DS3TRC Set register 7
****************************************************************************************************************/
void LSM6DS3TRC_Set_Register7(uint8_t reg7)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL7_G, buf, 1);
buf[0] |= reg7;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL7_G, buf, 1);
}
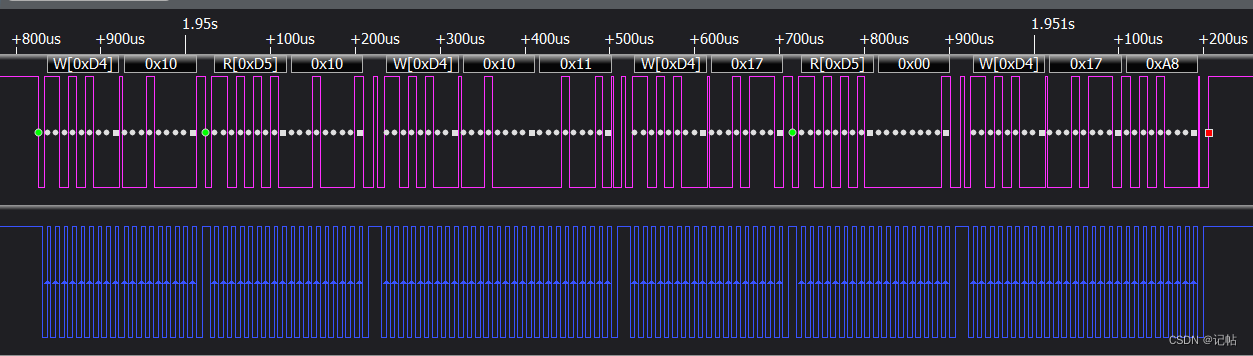
这里关闭高性能操作模式以及打开陀螺仪数字HP滤波器,截止频率选择260 mHz的波形如下所示。
#define LSM6DS3TRC_CTRL7_G_HP_EN_ENABLE 0x40
#define LSM6DS3TRC_CTRL7_G_HPM_260MHZ 0x20
LSM6DS3TRC_Set_Register7(LSM6DS3TRC_CTRL7_G_HP_EN_ENABLE | LSM6DS3TRC_CTRL7_G_HPM_260MHZ);

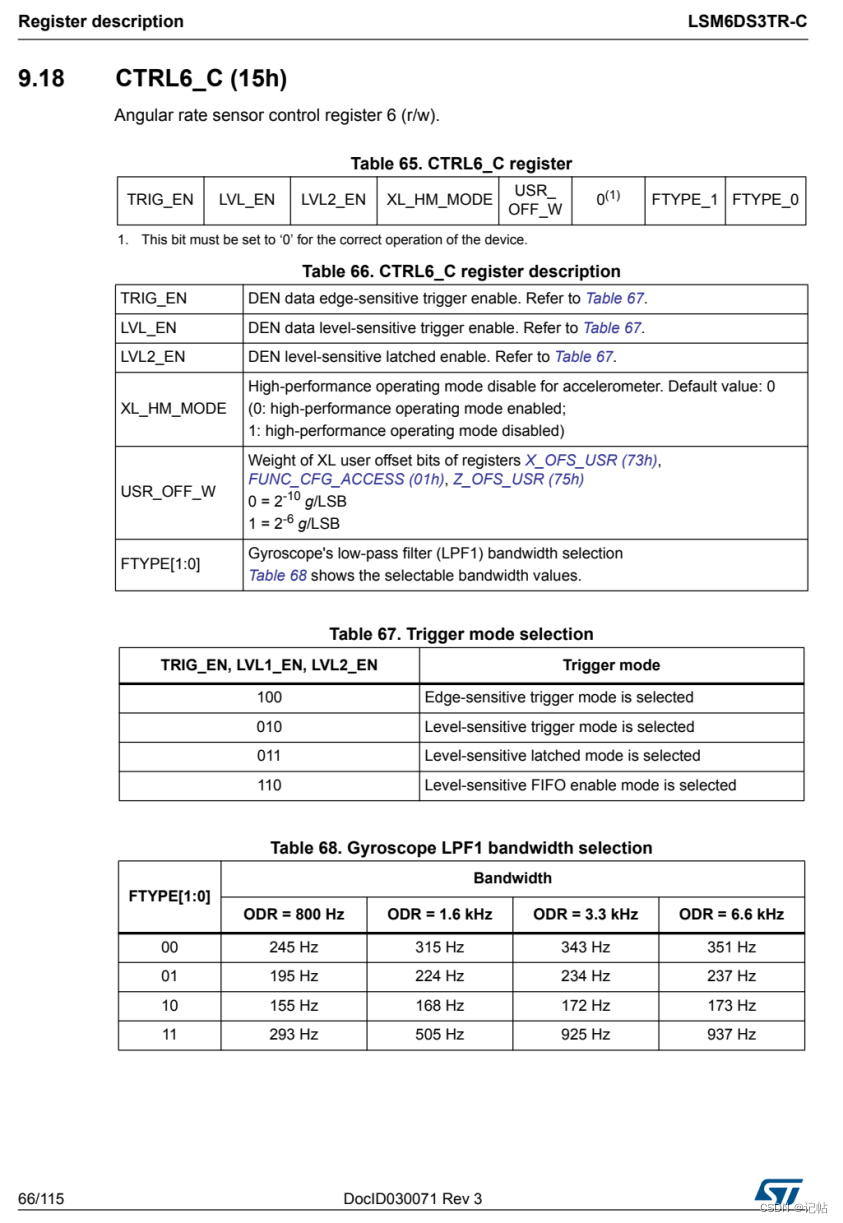
CTRL6_C寄存器主要用于配置陀螺仪的低通滤波器(LPF1)的带宽选择。通过修改FTYPE[1:0]的值,您可以选择不同的陀螺仪低通滤波器带宽。
FTYPE[1:0] - 陀螺仪的低通滤波器 (LPF1) 带宽选择。表68显示了可选的带宽值。
#define LSM6DS3TRC_CTRL6_C 0x15
//CTRL6_C register
#define LSM6DS3TRC_CTRL6_C_EDGE_TRIGGER 0x80
#define LSM6DS3TRC_CTRL6_C_LEVEL_TRIGGER 0x40
#define LSM6DS3TRC_CTRL6_C_LEVEL_LATCHED 0x60
#define LSM6DS3TRC_CTRL6_C_LEVEL_FIFO 0xC0
#define LSM6DS3TRC_CTRL6_C_XL_HM_MODE_ENABLE 0x00
#define LSM6DS3TRC_CTRL6_C_XL_HM_MODE_DISABLE 0x10
#define LSM6DS3TRC_CTRL6_C_FTYPE_1 0x00
#define LSM6DS3TRC_CTRL6_C_FTYPE_2 0x01
#define LSM6DS3TRC_CTRL6_C_FTYPE_3 0x02
#define LSM6DS3TRC_CTRL6_C_FTYPE_4 0x03
/***************************************************************************************************************
LSM6DS3TRC Set register 6
****************************************************************************************************************/
void LSM6DS3TRC_Set_Register6(uint8_t reg6)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL6_C, buf, 1);
buf[0] |= reg6;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL6_C, buf, 1);
}
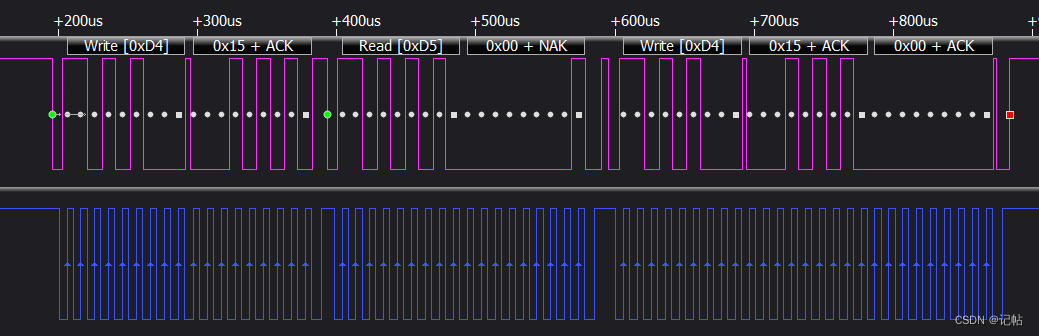
设置FTYPE[1:0]为00波形如下所示。
LSM6DS3TRC_Set_Register6(LSM6DS3TRC_CTRL6_C_FTYPE_1);
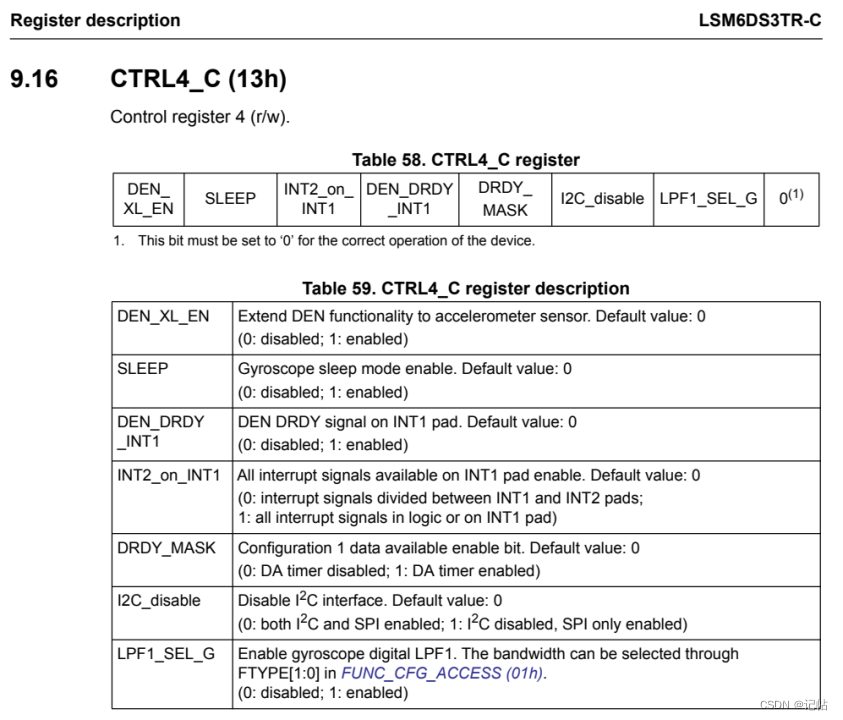
"LPF1_SEL_G"参数用于启用或禁用陀螺仪的数字低通滤波器1(LPF1)。如果设为1,则该滤波器启用;如果设为0,则该滤波器禁用,这里需要对LPF1_SEL_G 配置为1打开。
#define LSM6DS3TRC_CTRL4_C 0x13
//CTRL4_C register
#define LSM6DS3TRC_CTRL4_DEN_XL_EN_DISABLE 0x00
#define LSM6DS3TRC_CTRL4_DEN_XL_EN_ENABLE 0x80
#define LSM6DS3TRC_CTRL4_SLEEP_ENABLE 0x40
#define LSM6DS3TRC_CTRL4_SLEEP_DISABLE 0x00
#define LSM6DS3TRC_CTRL4_DEN_DRDY_INT1_DISBALE 0x00
#define LSM6DS3TRC_CTRL4_DEN_DRDY_INT1_ENABLE 0x20
#define LSM6DS3TRC_CTRL4_DRDY_MASK_DISABLE 0x00
#define LSM6DS3TRC_CTRL4_DRDY_MASK_ENABLE 0x08
#define LSM6DS3TRC_CTRL4_I2C_DISABLE 0x04
#define LSM6DS3TRC_CTRL4_I2C_ENABLE 0x00
#define LSM6DS3TRC_CTRL4_LPF1_SELG_ENABLE 0x02
#define LSM6DS3TRC_CTRL4_LPF1_SELG_DISABLE 0x00
/***************************************************************************************************************
LSM6DS3TRC Set register 6
****************************************************************************************************************/
void LSM6DS3TRC_Set_Register4(uint8_t reg4)
{
uint8_t buf[1] = {0};
LSM6DS3TRC_ReadCommand(LSM6DS3TRC_CTRL4_C, buf, 1);
buf[0] |= reg4;
LSM6DS3TRC_WriteCommand(LSM6DS3TRC_CTRL4_C, buf, 1);
}
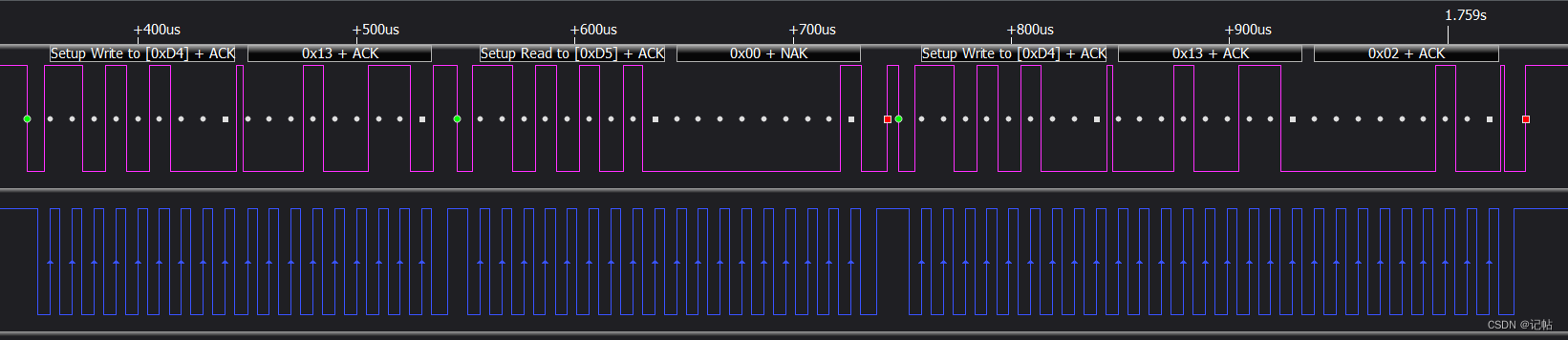
使能低通滤波器波形如下所示。
LSM6DS3TRC_Set_Register4(LSM6DS3TRC_CTRL4_LPF1_SELG_ENABLE);
总的配置流程如下所示。
陀螺仪初始化配置
/***************************************************************************************************************
LSM6DS3TRC Init
****************************************************************************************************************/
bool LSM6DS3TRC_Init(uint8_t mode)
{
lsm6ds3trc_mode = mode;
if (LSM6DS3TRC_GetChipID() == false)
return false;
//reboot and reset register
LSM6DS3TRC_Reset();
//enable Block Data Update
LSM6DS3TRC_Set_BDU(true);
//Set Data Rate
LSM6DS3TRC_Set_Accelerometer_Rate(LSM6DS3TRC_ACC_RATE_12HZ5);
LSM6DS3TRC_Set_Gyroscope_Rate(LSM6DS3TRC_GYR_RATE_12HZ5);
//Set full-scale selection.
LSM6DS3TRC_Set_Accelerometer_Fullscale(LSM6DS3TRC_ACC_FSXL_2G);
LSM6DS3TRC_Set_Gyroscope_Fullscale(LSM6DS3TRC_GYR_FSG_2000);
//set accelerometer analog chain bandwidth.
LSM6DS3TRC_Set_Accelerometer_Bandwidth(LSM6DS3TRC_ACC_BW0XL_400HZ, LSM6DS3TRC_ACC_LOW_PASS_ODR_100);
LSM6DS3TRC_Set_Register7(LSM6DS3TRC_CTRL7_G_HP_EN_ENABLE | LSM6DS3TRC_CTRL7_G_HPM_260MHZ);
LSM6DS3TRC_Set_Register6(LSM6DS3TRC_CTRL6_C_FTYPE_1);
LSM6DS3TRC_Set_Register4(LSM6DS3TRC_CTRL4_LPF1_SELG_ENABLE);
if (LSM6DS3TRC_GetChipID() == false)
return false;
return true;
}