简介
UART 控制器介绍
UART 控制器是一个全双工异步收发控制器,ZYNQ 内部包含两个 UART 控制器,UART0 和 UART1。每一个 UART 控制器支持可编程的波特率发生器、64 字节的接收 FIFO 和发送 FIFO、产生中断、RXD 和 TXD 信号的环回模式设置以及可配置的数据位长度、停止位和校验方式等。
UART 控制器系统框图如图所示:
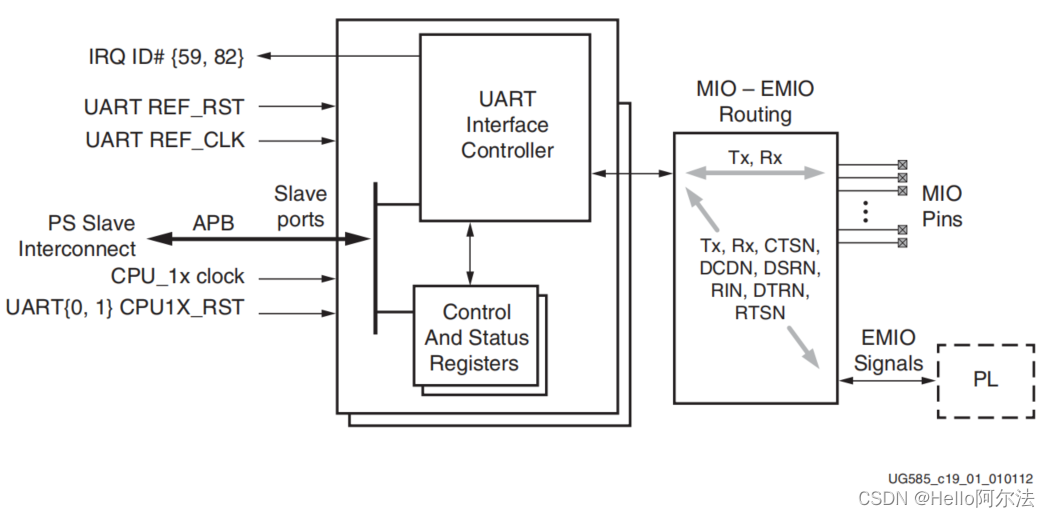
由上图可知,UART 控制器和 IO 端口由参考时钟(UART REF_CLK)驱动,同时控制器也需要连接 APB 总线时钟(CPU_1x clock),UART REF_CLK 和 CPU_1x clock 都是来自于 PS 时钟子系统。UART 控制器的配置以及状态的获取由控制(Control)和状态寄存器(Status Registers)完成。
另外,UART 控制器不仅可以连接至 MIO,也可以映射到 EMIO,从而使用 PL 的端口来实现串口通信的功能。当 UART 控制器连接到 MIO 时,只有 Tx(发送)和 Rx(接收)两个引脚;而当连接 EMIO 时,除 Tx 和 Rx 引脚外,可选的还有 CTSN、DSDN、DSRN 等引脚,这些引脚用于串口的流控制,即调制解调器的数据通讯中。
UART 控制器采用独立的接收和发送数据路径,每个路径包含一个 64 字节的 FIFO,控制器对发送和接收 FIFO 中的数据进行串并转换操作。FIFO 的中断标志支持轮询处理或中断驱动处理两种方式。另外,控制器中还有一个模式开关,支持 RXD 和 TXD 信号的各种环回配置。UART 控制器内部框图如下图所示:
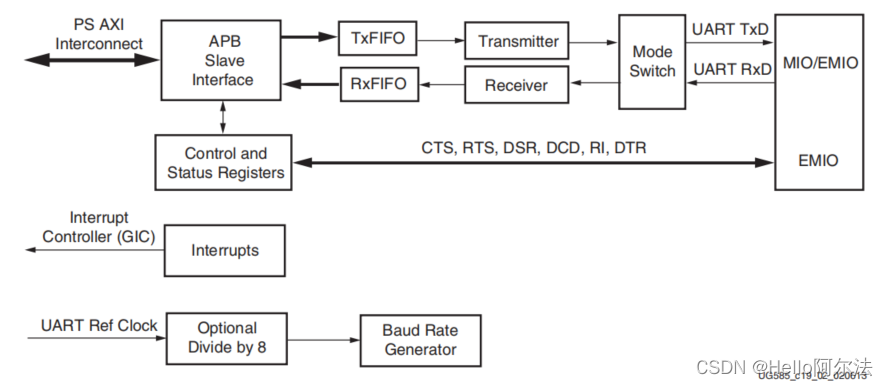
UART 控制器的寄存器通过 APB 从机接口和 PS AXI 总线互联,控制器的寄存器用于对 UART 控制器进行配置和获取状态。波特率发生器(Baud Rate Generator)为 UART 控制器的接收端和发送端提供位周期时钟;中断控制器(GIC)为串口的收发提供了中断服务的功能。
APB 总线接口通过向 TxFIFO 寄存器写值,将数据加载到 TxFIFO 存储器中。当数据加载至 TxFIFO 后,TxFIFO 的空标志变成无效的状态,直到最后一个数据从 TxFIFO 中移出,加载至传输移位寄存器,TxFIFO 恢复空的标志位。同时 TxFIFO 使用 TFULL(满中断状态)用于表示当前 TxFIFO 已经写满,并且会阻止数据继续写入。如果此时继续执行写操作,那么会触发溢出,数据不会加载到 TxFIFO 中。RxFIFO 存储器接收来自接收移位寄存器的数据,当接收完数据后,RxFIFO 空标志信号同样变成无效的状态,直到所有的数据通过 APB 总线发送出去。RxFIFO 的满标志状态用于表示 RxFIFO 已经写满,并且会阻止更多的数据写入。
模式切换(Mode Switch)控制器控制 RxD 和 TxD 的信号连接方式,总共分为四种模式,分别为:正常模式(Normal Mode)、自动回音模式(Automatic Echo Mode)、本地环回模式(Local Loopback Mode)和远程环回模式(Remote Loopback Mode)。模式切换的功能示意图如所示:
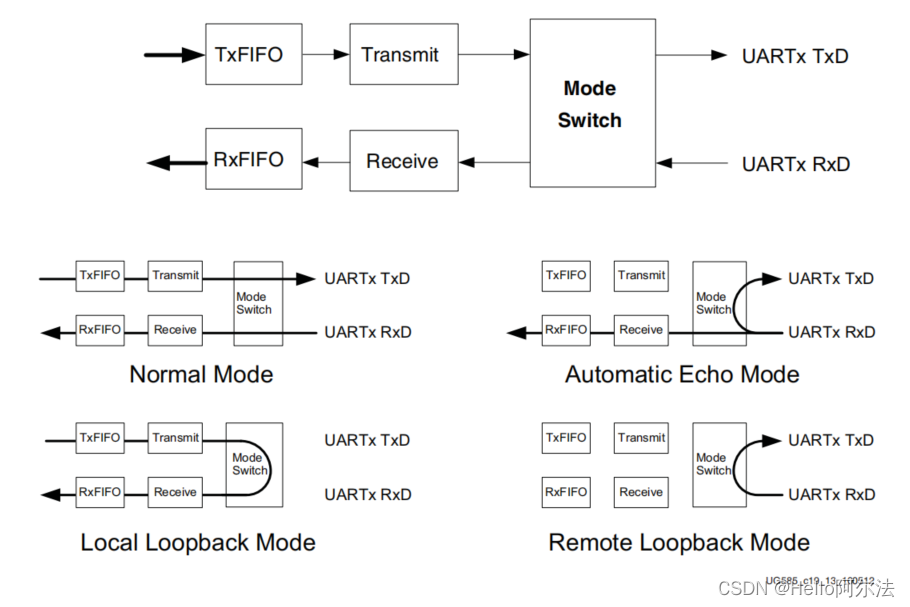
从上图中可以清晰的看出 UART 不同模式下所实现的功能。在实际应用中,最常用的就是 UART 的正常模式。
- 正常模式是标准的 UART 操作模式;
- 自动回音模式下,RxD 连接至 TxD,控制器可以接收数据,但是不能发送数据;
- 本地环回模式没有连接 RxD 和 TxD 的引脚,用于本地程序的环回测试;
- 远程环回模式下,RxD 连接至 TxD,但是并没有和控制器连接,因此控制器在此模式下无法发送数据和接收数据。
UART 驱动示例
测试平台:黑金 AX7Z035
芯片型号:XC7Z035-2FFG676
- uart.c
/**
* Copyright (c) 2022-2023,HelloAlpha
*
* Change Logs:
* Date Author Notes
*/
#include "uart.h"
/**
* @brief 串口初始化
*/
int UartInit(XUartPs* UartInstancePtr, XUartPsFormat* UartFormat, uint16_t UartDeviceId)
{
int Status;
XUartPs_Config *UartConfigPtr;
UartConfigPtr = XUartPs_LookupConfig(UartDeviceId);
if (NULL == UartConfigPtr) {
return XST_FAILURE;
}
Status = XUartPs_CfgInitialize(UartInstancePtr, UartConfigPtr,
UartConfigPtr->BaseAddress);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
Status = XUartPs_SelfTest(UartInstancePtr);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
/* Set UART mode Baud Rate 115200, 8bits, no parity, 1 stop bit */
XUartPs_SetDataFormat(UartInstancePtr, UartFormat) ;
/* Set the UART in Normal Mode */
XUartPs_SetOperMode(UartInstancePtr, XUARTPS_OPER_MODE_NORMAL);
return Status;
}
/**
* @brief 串口中断初始化
*/
int UartIntrInit(XScuGic *IntcInstancePtr, XUartPs *UartInstancePtr,
uint32_t UartIntrId, void(* CallBack)(void *))
{
int Status;
XScuGic_Config *IntcConfig;
IntcConfig = XScuGic_LookupConfig(INTC_DEVICE_ID);
if (NULL == IntcConfig) {
return XST_FAILURE;
}
Status = XScuGic_CfgInitialize(IntcInstancePtr, IntcConfig,
IntcConfig->CpuBaseAddress);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
Xil_ExceptionInit();
Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT,
(Xil_ExceptionHandler) XScuGic_InterruptHandler,
IntcInstancePtr);
Xil_ExceptionEnable();
Status = XScuGic_Connect(IntcInstancePtr, UartIntrId,
(Xil_ExceptionHandler) CallBack,
(void *) UartInstancePtr);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
/* Set the receiver timeout.*/
XUartPs_SetRecvTimeout(UartInstancePtr, 8);
/*Set receiver FIFO interrupt trigger level, here set to 1*/
XUartPs_SetFifoThreshold(UartInstancePtr, 1);
/* 设置中断触发类型 */
XUartPs_SetInterruptMask(UartInstancePtr,
XUARTPS_IXR_RXOVR | XUARTPS_IXR_RXEMPTY | XUARTPS_IXR_TOUT);
XScuGic_Enable(IntcInstancePtr, UartIntrId);
return Status ;
}
/**
* @brief 串口数据发送函数
*/
int UartPsSend(XUartPs *InstancePtr, uint8_t *BufferPtr, uint32_t NumBytes)
{
uint32_t SentCount = 0U;
/* Setup the buffer parameters */
InstancePtr->SendBuffer.RequestedBytes = NumBytes;
InstancePtr->SendBuffer.RemainingBytes = NumBytes;
InstancePtr->SendBuffer.NextBytePtr = BufferPtr;
while (InstancePtr->SendBuffer.RemainingBytes > SentCount)
{
/* Fill the FIFO from the buffer */
if (!XUartPs_IsTransmitFull(InstancePtr->Config.BaseAddress))
{
XUartPs_WriteReg(InstancePtr->Config.BaseAddress,
XUARTPS_FIFO_OFFSET,
((uint32_t)InstancePtr->SendBuffer.
NextBytePtr[SentCount]));
/* Increment the send count. */
SentCount++;
}
}
/* Update the buffer to reflect the bytes that were sent from it */
InstancePtr->SendBuffer.NextBytePtr += SentCount;
InstancePtr->SendBuffer.RemainingBytes -= SentCount;
return SentCount;
}
/**
* @brief 串口数据接收函数
*/
int UartPsRev(XUartPs *InstancePtr, uint8_t *BufferPtr, uint32_t NumBytes)
{
uint32_t ReceivedCount = 0;
uint32_t CsrRegister;
/* Setup the buffer parameters */
InstancePtr->ReceiveBuffer.RequestedBytes = NumBytes;
InstancePtr->ReceiveBuffer.RemainingBytes = NumBytes;
InstancePtr->ReceiveBuffer.NextBytePtr = BufferPtr;
/*
* Read the Channel Status Register to determine if there is any data in
* the RX FIFO
*/
CsrRegister = XUartPs_ReadReg(InstancePtr->Config.BaseAddress,
XUARTPS_SR_OFFSET);
/*
* Loop until there is no more data in RX FIFO or the specified
* number of bytes has been received
*/
while((ReceivedCount < InstancePtr->ReceiveBuffer.RemainingBytes)&&
(((CsrRegister & XUARTPS_SR_RXEMPTY) == (u32)0)))
{
InstancePtr->ReceiveBuffer.NextBytePtr[ReceivedCount] =
XUartPs_ReadReg(InstancePtr->Config.BaseAddress, XUARTPS_FIFO_OFFSET);
ReceivedCount++;
CsrRegister = XUartPs_ReadReg(InstancePtr->Config.BaseAddress,
XUARTPS_SR_OFFSET);
}
InstancePtr->is_rxbs_error = 0;
/*
* Update the receive buffer to reflect the number of bytes just
* received
*/
if(NULL != InstancePtr->ReceiveBuffer.NextBytePtr){
InstancePtr->ReceiveBuffer.NextBytePtr += ReceivedCount;
}
InstancePtr->ReceiveBuffer.RemainingBytes -= ReceivedCount;
return ReceivedCount;
}
/**
* @brief 串口波特率更改
*/
int UartSetBaudRate(uint16_t UartDeviceId , uint32_t Baudrate)
{
static XUartPs Uart;
XUartPs_Config *UartConfigPtr;
UartConfigPtr = XUartPs_LookupConfig(UartDeviceId);
if (NULL == UartConfigPtr) {
return XST_FAILURE;
}
XUartPs_CfgInitialize(&Uart, UartConfigPtr, UartConfigPtr->BaseAddress);
XUartPs_SetBaudRate(&Uart, Baudrate);
return XST_FAILURE;
}
- uart.h
/**
* Copyright (c) 2022-2023,HelloAlpha
*
* Change Logs:
* Date Author Notes
*/
#ifndef __UART_H__
#define __UART_H__
#include "xuartps.h"
#include "xscugic.h"
#ifndef INTC_DEVICE_ID
#define INTC_DEVICE_ID XPAR_SCUGIC_SINGLE_DEVICE_ID
#endif
#define UART0_DEVICE_ID XPAR_XUARTPS_0_DEVICE_ID
#define UART1_DEVICE_ID XPAR_XUARTPS_1_DEVICE_ID
#define UART0_IRPT_INTR XPAR_XUARTPS_0_INTR
#define UART1_IRPT_INTR XPAR_XUARTPS_1_INTR
/*
* Function declaration
*/
int UartInit(XUartPs* UartInstancePtr, XUartPsFormat* UartFormat, uint16_t UartDeviceId);
int UartIntrInit(XScuGic *IntcInstancePtr, XUartPs *UartInstancePtr,
uint32_t UartIntrId, void(* CallBack)(void *));
int UartPsSend(XUartPs *InstancePtr, uint8_t *BufferPtr, uint32_t NumBytes) ;
int UartPsRev (XUartPs *InstancePtr, uint8_t *BufferPtr, uint32_t NumBytes) ;
int UartSetBaudRate(uint16_t UartDeviceId , uint32_t Baudrate);
#endif